一种金属件打磨机器人及操控方法与流程
本发明涉及机器人,尤其涉及一种金属件打磨机器人及操控方法。
背景技术:
1、打磨是表面改性技术的一种,一般指借助含有较高硬度颗粒的砂纸等来通过摩擦改变材料表面物理性能的一种加工方法,主要目的是为了获取特定表面粗糙度。为清除底材表面的毛刺、浮锈、油污、灰尘,清除涂层表面的粗颗粒及杂质,获得平整表面的效果。
2、目前市场上的矩形金属工件使用广泛,但市面上对矩形金属工件表面处理设备存在一些明显的不足。首先,这些设备通常只能对金属件的单一面进行打磨,如果需要处理另一面,需要将金属件取下后翻面,重新固定后,再进行打磨,这不仅增加了操作步骤,还容易因为夹持错位影响打磨的精度和质量。再有,夹持部件的形状和大小各异,这使得它们在打磨过程中容易出现死角。例如,一些较小的夹持部件可能因为其形状复杂,导致打磨工具无法完全覆盖其表面,从而留下死角。此外,一些较大的夹持部件可能因为其尺寸过大,使得打磨工具无法深入到其内部,同样也会留下死角。
技术实现思路
1、本发明的目的是为了解决现有技术中需要将金属件重新固定才能打磨第二面和夹具造成的打磨死角的问题,而提出的一种金属件打磨机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
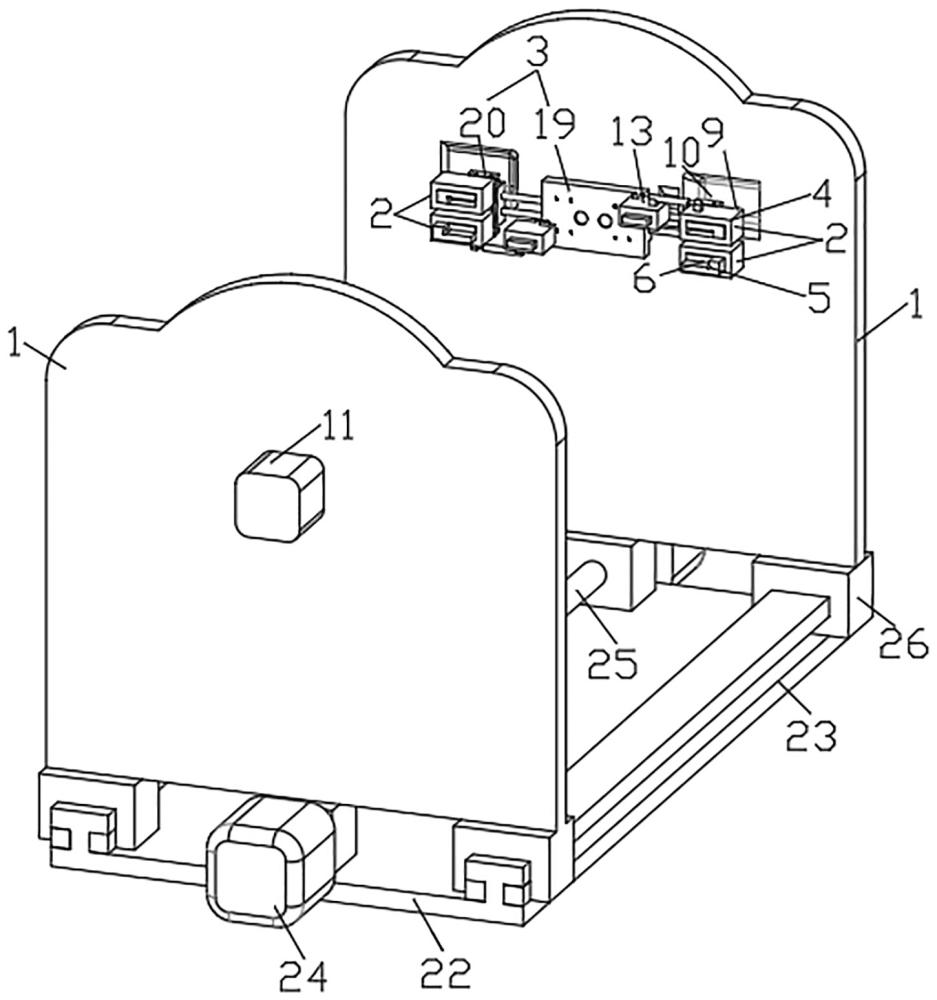
3、一种金属件打磨机器人,包括两个相对设置的背板,所述背板上设置有:
4、夹持部,所述夹持部通过连接件连接于所述背板上,所述夹持部包括夹持外壳和夹持齿,所述夹持齿为上下对称的两个,且所述夹持齿上开设有用于夹持五金件端部端点面的夹持槽,所述夹持齿滑动于夹持外壳内,所述夹持齿靠近背板的一侧通过弹性件连接有抵杆;
5、下沉槽,所述下沉槽对称设置于所述背板上,且五金件水平夹持于两个所述夹持部上时,位于下方所述夹持齿的所述抵杆抵触于所述背板上,且位于上方所述夹持齿的所述抵杆抵触于所述下沉槽内。
6、优选地,所述背板相对所述夹持部的一侧设置有第一转动电机,所述第一转动电机的输出端贯穿所述背板并与所述连接件固定。
7、优选的,所述弹性件包括弹簧,所述弹簧一端固定于所述夹持外壳内,另一端固定于所述夹持齿上。
8、优选地,所述下沉槽的上下两端呈斜面设置。
9、优选地,所述连接件以电机的输出轴位置中心对称设置有辅助支撑部;
10、所述辅助支撑部包括滑动外壳和支撑凸起,所述支撑凸起滑入所述滑动外壳内,且所述支撑凸起上设置有用于驱动支撑凸起复位的触杆,所述背板上设置有与其中一个所述触杆位置对应的辅助支撑触发槽,所述辅助支撑触发槽相比所述下沉槽更接近所述第一转动电机的输出轴;
11、所述辅助支撑部还包括伸缩杆,所述伸缩杆两端连接于所述滑动外壳和所述夹持外壳上。
12、优选的,所述连接件包括第一双向气缸,所述第一双向气缸的外壳固定于所述第一转动电机的输出端上,所述第一双向气缸的输出端连接有基座板。
13、优选地,述夹持外壳为可相对纵向移动的两个;
14、所述基座板上固定连接第二双向气缸,且所述第二双向气缸垂直于所述第一双向气缸设置;
15、同一所述夹持部的所述夹持外壳数量为两个,所述夹持外壳由所述第二双向气缸带动做相向或相背运动;
16、所述第一双向气缸的外壳上设置有用于所述滑动外壳滑动的滑轨。
17、优选地,所述一种金属件打磨机器人还包括:
18、底座,所述底座上对称固定有两个滑动轨;
19、第二转动电机,所述第二转动电机固定于所述底座上;
20、转动杆,所述转动杆固定于所述第二转动电机的输出端上,所述转动杆上开设有螺纹,且两端螺纹反向设置;
21、滑动块,所述滑动块数量为两个,所述滑动块对称设置于固定设置于所述背板底部,所述滑动块滑动于滑动轨上。
22、优选的,当五金件水平夹持于两个所述夹持齿上时,位于上方的所述夹持齿内包含的夹持槽与位于所述辅助支撑部上方的支撑凸起底面在同一平面,位于下方的所述夹持齿内包含的夹持槽与位于所述辅助支撑部下方的支撑凸起顶面在同一平面。
23、与现有技术相比,本发明具备以下优点:
24、1、本发明通过第一转动电机带动夹持部将夹持中的金属件进行翻转,从而实现对矩形五金金属件的正反两面进行打磨或加工。在翻转过程中,夹持部能够保持金属件的位置稳定,确保金属件不会发生移动或滑落。通过一次翻转即可实现对金属件的正反两面进行打磨或加工,无需取下金属件并重新固定,大大提高了工作效率。这为打磨或加工过程提供了稳定的基础,避免了因金属件位置不稳定而产生的误差。
25、2、本发明夹持部通过气缸进行位置调节,这种设计使得夹持尺寸能够得到精确控制。通过这种方式,夹持部可以夹持更多不同尺寸的金属件,扩大了机器人的应用范围。此外,这种设计也提高了机器人的适应性和灵活性,使其能够适应各种不同的工作环境和任务需求。夹持部的设计精度高,响应速度快,能够实现快速夹持和释放,提高了生产效率。本发明的夹持部设计巧妙,能够牢固地夹持各种形状和大小的金属件。
技术特征:
1.一种金属件打磨机器人,其特征在于,包括两块相对设置的背板(1),所述背板(1)上设置有:
2.根据权利要求1所述的一种金属件打磨机器人,其特征在于,其中:
3.根据权利要求1所述的一种金属件打磨机器人,其特征在于,其中:
4.根据权利要求1所述的一种金属件打磨机器人,其特征在于,其中:所述下沉槽(10)的上下两端呈斜面设置。
5.根据权利要求2所述的一种金属件打磨机器人,其特征在于,其中:
6.根据权利要求2所述的一种金属件打磨机器人,其特征在于,其中:
7.根据权利要求6所述的一种金属件打磨机器人,其特征在于,其中:
8.根据权利要求1所述的一种金属件打磨机器人,其特征在于,所述一种金属件打磨机器人还包括:
9.根据权利要求5所述的一种金属件打磨机器人,其特征在于,当五金件水平夹持于两个所述夹持齿(5)上时,位于上方的所述夹持齿(5)内包含的夹持槽(6)与位于所述辅助支撑部(13)上方的支撑凸起(15)底面在同一平面,位于下方的所述夹持齿(5)内包含的夹持槽(6)与位于所述辅助支撑部(13)下方的支撑凸起(15)顶面在同一平面。
10.应用权利要求1-9中任一一项所述的一种金属件打磨机器人的操控方法,其特征在于,所述操控方法包括以下步骤:
技术总结
本发明涉及机器人技术领域,尤其涉及一种金属件打磨机器人及操控方法,包括两个相对设置的背板,所述背板上设置有夹持部和下沉槽;所述夹持部通过连接件连接于所述背板上,所述夹持部包括夹持外壳和夹持齿;所述下沉槽对称设置于所述背板上,且五金件水平夹持于两个所述夹持部上时,位于下方所述夹持齿的所述抵杆抵触于所述背板上,且位于上方所述夹持齿的所述抵杆抵触于所述下沉槽内。本发明通过第一转动电机带动夹持部将夹持中的金属件进行翻转,从而实现对矩形五金金属件的正反两面进行打磨或加工;在翻转过程中,通过一次翻转即可实现对金属件的正反两面进行打磨或加工,无需取下金属件并重新固定。
技术研发人员:虞静,黄陆君,唐海龙,黄贵余
受保护的技术使用者:四川吉埃智能科技有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!