一种履带桨叶一体化的两栖无人车船的制作方法
[0001]
本发明涉及一种两栖无人车船,具体涉及一种履带桨叶一体化的两栖无人车船。
背景技术:
[0002]
两栖船同时具备水陆两种通行方式,因此,它在救援、养殖甚至军事方面都可以起到很大的作用。两栖船由于需要具备水上与陆上航行的双重能力,因此以往的两栖船一般采用两套推进机构去实现,或者设计一套可以变形的推进机构满足两种航行,在不同的航行方式时,推进机构变换不同的形式,前者导致船的推进设备复杂且繁多,使得船体的重量增大,并且由于需要切换不同的推进机构满足推进要求,两栖船的操作更加繁杂,后者的设计解决了上述问题,但是由于该推进机构需要频繁的变形满足不同的推进要求,使得对该推进装置的可靠性有更高的要求,否则易于出现故障。
技术实现要素:
[0003]
本发明为解决现有的两栖船采用两套推进机构或一套可以变形的推进机构满足两种航行,导致其船体重量大、结构复杂且水下阻力较大等问题,进而提供一种履带桨叶一体化的两栖无人车船。
[0004]
本发明为解决上述问题采取的技术方案是:
[0005]
本发明包括船体、两个主动轮和两个从动轮,船体为矩形结构,所述一种履带桨叶一体化的两栖无人车船还包括履带和多个桨叶,两个主动轮沿船体宽度方向并排安装在船体的前端,两个从动轮沿船体的宽度方向并排安装在船体的后端,主动轮通过履带与从动轮连接,多个桨叶沿履带的长度方向安装在履带的外表面上。
[0006]
进一步地,所述每个桨叶为矩形结构,每个桨叶的一侧设有凹槽,每个桨叶的另一侧设有与凹槽配合的凸起,每个桨叶的凸起与相邻桨叶的凹槽互相啮合。
[0007]
进一步地,所述一种履带桨叶一体化的两栖无人车船还包括耐摩擦材料,每个桨叶的外端面设有耐摩擦层。
[0008]
进一步地,所述耐摩擦层为轮胎橡胶、耐磨聚氨酯或耐磨陶瓷涂料。
[0009]
进一步地,所述履带的宽度小于船体的宽度。
[0010]
本发明的有益效果是:
[0011]
本发明结构简单,操作方便,解决了一般两栖船使用两套推进机构导致的机构复杂及操作繁琐的问题,同时推进机构提供动力的同时,中部平行段通过桨叶之间的啮合形成一个浮力体,提供船艇在水中的浮力,通过降低浮力体与水流的相对速度,可以大幅度减小水下阻力。
附图说明
[0012]
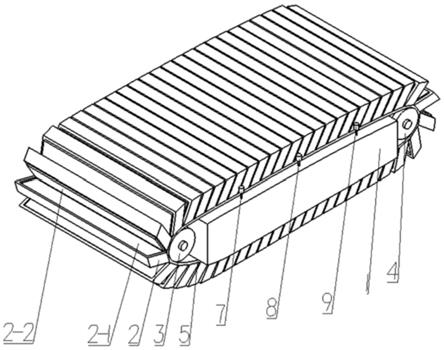
图1是本发明的整体结构示意图;
[0013]
图2是船体的结构示意图;
[0014]
图3是桨叶的结构示意图;
[0015]
图4是两片桨叶互相啮合的示意图;
[0016]
图5是桨叶中部平行段的减阻机理示意图。
具体实施方式
[0017]
具体实施方式一:结合图1至图2说明本实施方式,本实施方式一种履带桨叶一体化的两栖无人车船,它包括船体1、两个主动轮3和两个从动轮4,船体1为矩形结构,所述一种履带桨叶一体化的两栖无人车船还包括履带5和多个桨叶2,两个主动轮3沿船体1宽度方向并排安装在船体1的前端,两个从动轮4沿船体1的宽度方向并排安装在船体1的后端,主动轮3通过履带5与从动轮4连接,多个桨叶2沿履带的长度方向安装在履带5的外表面上。
[0018]
通过传动系统如柴油机驱动主动轮3转动,进而带动履带行走机构的运动,完成船体推进。水上运动时,浆叶与水的相对运动小于船的移动速度,相当于减小船在水上运动的阻力。在强度满足要求的情况下,桨叶应该使用密度小的材料,如碳纤维蜂窝复合材料、泡沫金属复合材料等,以提升两栖船的浮力。
[0019]
其它组成及连接关系与具体实施方式一相同。
[0020]
具体实施方式二:结合图3和图4说明本实施方式,本实施方式所述每个桨叶2为矩形结构,每个桨叶2的一侧设有凹槽2-1,每个桨叶2的另一侧设有与凹槽2-1配合的凸起2-2,每个桨叶的凸起2-2与相邻桨叶的凹槽2-1互相啮合。
[0021]
桨叶2的凹槽2-1与凸起2-2相互啮合,在水上运动时,水下的桨叶可以互相啮合,形成一个浮力体,提供船艇在水中的浮力,通过降低浮力体与水流的相对速度,锁住桨叶间的空气,可以大幅度减小水下阻力。
[0022]
其它组成以连接关系与具体实施方式一相同。
[0023]
具体实施方式三:结合图3说明本实施方式,本实施方式所述一种履带桨叶一体化的两栖无人车船还包括耐摩擦材料6,每个桨叶2与地面接触的面设有耐摩擦层6。
[0024]
桨叶与地面接触的面设有耐摩擦层6可以保护桨叶2,以增加其使用寿命。
[0025]
其它组成及连接关系与具体实施方式一或二相同。
[0026]
具体实施方式四:结合图3说明本实施方式,本实施方式所述耐摩擦层6为轮胎橡胶、耐磨聚氨酯或耐磨陶瓷涂料。
[0027]
其它组成及连接关系与具体实施方式一、二或三相同。
[0028]
具体实施方式五:结合图1说明本实施方式,本实施方式所述履带5的宽度小于船体1的宽度。
[0029]
其它组成及连接关系与具体实施方式一、二、三或四相同。
[0030]
工作原理(参见图1至图5):
[0031]
通过传动系统如柴油机驱动主动轮3转动,进而带动履带行走机构的运动,完成船体推进。在水上运动时,位于水下部分的桨叶2由于相邻的两片桨圳可以互相啮合,锁住空气,增加船体的浮力。在陆上运动时,位于桨叶外侧的耐摩擦层可以保护桨叶,以增加其寿命。在船体上表面左右两侧未被履带包裹处由船首至船尾方向依次设置有探测设备7、通讯设备8和gps/ins组合导航系统9,探测设备7包括光电吊舱、激光雷达、航海雷达、全景相机等设备;通讯系统8包括数据传输电台、图像传输电台等设备。船体上表面左右两侧未被履
带包裹的探测设备7用于探测海上船体附近的信息如障碍物等,gps/ins组合导航系统9可以精确定位船的位置,这些设备探测到或定位的信息可以通过通讯设备8发送出去,通讯设备8也可接收指挥室的指令来控制船体的行动。
[0032]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1