基于空气悬架的挂车车身高度和车身平衡的自动调节方法与流程
[0001]
本发明涉及一种挂车车身高度和车身平衡的自动调节方法,更具体的说,尤其涉及一种根据所检测的载重、车速、车身平衡状态以及路面状况进行车身高度和平衡调节的基于空气悬架的挂车车身高度和车身平衡的自动调节方法。
背景技术:
[0002]
gb7258-2017《机动车运行安全技术条件》中,增加了总质量大于或等于12000kg的危险货物运输货车的后轴,所有危险货物运输半挂车,以及三轴栏板式、仓栅式半挂车应装备空气悬架的内容,因此空气悬挂取代板簧悬挂已成为行业必然。
[0003]
当前市场上主流的技术方案为:空气弹簧悬架系统依靠高度阀对车身高度的检测,实现挂车负载变化时保持车身高度的稳定。同时为实现不同负载情况下车身高度的调节,并提高挂车的通过性,一般还安装可控制的升降阀,用以实现整车高度的调节。同时,挂车系列为了增加载重,同时降低单个车桥所承受的重量,会采用多个车桥。挂车在行驶的过程中,车身高度越高,空气悬架气囊的滤震效果越佳,但挂车的稳定性降低。因此,需要将车身高度与行驶速度、载重、路况等匹配起来,保证挂车具有良好稳定性和安全行驶的前提下,使车身高度与速度、载重实现最佳匹配。同时,挂车车身是否平衡影对安全行驶具有很大影响,尤其是对于载重较大的挂车来说,如果出现车身严重不平衡的状况,可能会引发挂车侧翻。但目前还没有一种可自动对挂车车身高度和车身平衡的调节方法。
技术实现要素:
[0004]
本发明为了克服上述技术问题的缺点,提供了一种基于空气悬架的挂车车身高度和车身平衡的自动调节方法。
[0005]
本发明的基于空气悬架的挂车车身高度和车身平衡的自动调节方法,挂车上设置有储气筒、车身控制主机、第一车身高度调节电磁阀、第二车身高度调节电磁阀、第一高度传感器、第二高度传感器以及提升阀,所述挂车上设置有2个或2个以上的车桥,每个车桥的左、右两端分别设置有对其进行高度调节的左气囊和右气囊,最前端的车桥上设置有提升气室;储气筒经第一车身高度调节电磁阀对所有车桥上的左气囊进行供气,储气筒经第二车身高度调节电磁阀对所有车桥上的右气囊进行供气,储气筒经提升阀对提升气室进行供气,第一车身高度调节电磁阀、第二车身高度调节电磁阀和提升阀的控制端均与车身控制主机的输出端相连接;第一高度传感器、第二高度传感器分别检测车身左侧和右侧的高度,车身控制主机分别经第一压力传感器和第二压力传感器检测左气囊和右气囊的压力;车身控制主机包含有用于获取挂车位置信息和行驶速度的gps模块以及速度传感器模块;其特征在于:所述挂车提桥和车身高度调节方法通过以下步骤来实现:a).车身升降速度判断,车身控制主机获取挂车当前行驶速度vt,并判断vt是否小于车身升降智能速度v
智能
,如果vt≤v
智能
,则表明当前行驶速度允许车身升降,执行步骤b);如果vt>v
智能
,执行步骤f);
b).车身升降载重判断,车身控制主机判断当前载重gt是否小于车身升降载重安全阈值g1,如果gt≤g1,则表明挂车载重允许车身升降,执行步骤c);如果gt>g1,执行步骤f);c).车身平衡判断,车身控制主机经第一、第二高度传感器分别检测车身底盘左侧的高度h1和右侧的高度h2,并判断| h1-h2|是否小于阈值
△
h,如果| h1-h2|≤
△
h,表明当前车身平衡状态允许车身升降,执行步骤d),如果| h1-h2|>
△
h,执行步骤f);d).路况判断,车身控制主机判断挂车是否处于连续转弯路段和颠簸路段,如果挂车既不处于连续转弯路段,又不处于颠簸路段,则表面路况允许车身升降,执行步骤e);如果挂车处于连续转弯或颠簸路段,执行步骤f);e).普通高度车身升降控制,车身控制主机通过控制第一车身高度调节电磁阀和第二车身高度调节电磁阀,控制储气筒中的压力气体进入到左气囊和右气囊中或者将左气囊和右气囊中的气体放出,分别实现车身高度的提升和车身高度的降落,将车身高度调节到普通高度h
普通
,并通过第一高度传感器和第二高度传感器来反馈车身高度,将车身高度维持在利用公式(1)计算出的数值:h
普通
(t)=f1(vt)+f2(gt)
ꢀꢀ
(1)其中,h
普通
(t)为当前车身高度值,f1()为当前车速所决定的车身高度函数,f2()为当前载重所决定的车身高度函数,vt、gt分别为车辆当前速度和当前载重,即检测实时速度、载重得到的值,函数f1()、f2()均为单调递减函数;然后循环重新执行步骤a);f).智能高度车身升降控制,车身控制主机通过控制第一车身高度调节电磁阀和第二车身高度调节电磁阀,控制储气筒中的压力气体进入到左气囊和右气囊中或者将左气囊和右气囊中的气体放出,分别实现车身高度的提升或车身高度的降落,将车身高度调节到智能高度h
智能
,并通过第一高度传感器和第二高度传感器来反馈车身高度,将车身高度维持在利用公式(2)计算出的数值:h
智能
(t)=f3(vt)+f4(gt)
ꢀꢀ
(2)其中,h
智能
(t)为当前车身目标高度值,f3()为当前车速所决定的车身高度函数,f4()为当前载重所决定的车身高度函数,vt、gt分别为车辆当前速度和当前载重,即检测实时速度、载重得到的值,函数f3()、f4()均为单调递减函数;然后循环重新执行步骤a)。
[0006]
本发明的基于空气悬架的挂车车身高度和车身平衡的自动调节方法,所述挂车车身平衡的自动调节方法通过以下步骤来实现:1).车身平衡检测,车身控制主机经第一高度传感器和第二高度传感器分别检测车身左侧的高度h1和右侧的高度h2,并判断h1与h2的大小,如果h1<h2且h2-h1≥
△
h,则表明车身发生了左倾且倾斜程度超过了安全阈值
△
h,则执行步骤2);如果h1>h2且h1-h2≥
△
h,则表明车身发生了右倾且倾斜程度超过了安全阈值
△
h,则执行步骤3);如果| h1-h2|<
△
h,表明车身处于平衡状态,无需进行车身调整,继续进行车身平衡检测;2).左倾调整,车身控制主机通过对第一车身高度调节电磁阀的控制,使储气筒中的压力气体进入左气囊中,来提升车身左侧的高度;或者通过对第二车身高度调节电磁阀的控制,使右气囊中的气体排出,来降低车身右侧的高度,最终达到车身左右侧高度一致;3).右倾调整,车身控制主机通过对第二车身高度调节电磁阀的控制,使储气筒中的压力气体进入右气囊中,来提升车身右侧的高度;或者通过对第一车身高度调节电磁阀的控制,使左气囊中的气体排出,来降低车身左侧的高度,最终达到车身左右侧高度一致。
[0007]
本发明的基于空气悬架的挂车车身高度和车身平衡的自动调节方法,步骤d)中所述的路况判断通过以下方法来实现:a).连续转弯路段判断,车身控制主机通过最近时间段t1内所采集的挂车地理位置坐标信息,形成挂车的行驶路径曲线,根据行驶路径曲线判断是否存在2个或2个以上的连续转弯,如果存在,则表面当前路段为连续转弯路段,如果不存在,表明当前路段为非连续转弯路段;b).路面水平判断,车身控制主机经第一高度传感器和第二高度传感器分别采集最近时间段t2内车身左侧的高度和右侧的高度,并判断时间段t2内车身左侧和右侧的高度变化频率和幅度是否超出了安全阈值,如果超出了安全阈值,则表明挂车处于倾斜路面,如果没有超出安全阈值,则表明挂车所处路面水平;c).颠簸路段判断,车身控制主机分别经第一压力传感器和第二压力传感器采集最近时间段t3内左气囊和右气囊的压力,并判断时间段t3内左气囊或右气囊的压力变化是否超出了安全阈值,如果两者之一超出了安全阈值,则表明挂车处于颠簸路段,如果两者均没有超出安全阈值,则表明挂车处于非颠簸路段。
[0008]
本发明的基于空气悬架的挂车车身高度和车身平衡的自动调节方法,步骤a)中所述的车身升降速度阈值v
智能
的取值范围为0.8v
核定
~0.9v
核定
;v
核定
为挂车的最大允许速度;步骤b)中所述的车身升降载重阈值g2取值范围为0.8g
核定
~0.9g
核定
,g
核定
为挂车的最大核定载重,步骤c)中所述的阈值
△
h的取值在1~3cm范围内可调。
[0009]
本发明的有益效果是:本发明的挂车车身高度和车身平衡的自动调节方法,在车身升降调整的过程中,首先判断挂车行驶速度、载重是否在设定安全阈值范围内,并对车身平衡状态和路况进行判断,在挂车速度、载重、车身平衡或路面状况允许车身高度调整的情况下,根据当前速度、载重由公式h
智能
(t)=f3(vt)+f4(gt) 、h
普通
(t)=f1(vt)+f2(gt)计算,对车身高度进行调整,使车身高度维持在公式(1)或公式(2)所计算出的高度上;h
普通
(t)=f1(vt)+f2(gt)
ꢀꢀ
(1)h
智能
(t)=f3(vt)+f4(gt)
ꢀꢀ
(2)其中,h
普通
(t) 为当前车身高度值,h
智能
(t)为当前车身目标高度值,f1()、f3()为当前车速所决定的车身高度函数,f2()、f4()为当前载重所决定的车身高度函数,vt、gt分别为车辆当前速度和当前载重,即检测实时速度、载重得到的值,函数f1()、f2()、f3()、f4()均为单调递减函数。
[0010]
进一步地,通过第一、第二高度传感器检测车身是否倾斜,当车身发生倾斜时,通过抬升车桥一侧或降低另一侧来调整车身左右侧高度一致,确保了挂车载货行驶过程中的安全性。
附图说明
[0011]
图1为本发明的基于空气悬架的挂车车身高度和车身平衡的自动调节的系统原理图;图2为本发明的挂车车身高度和车身平衡的自动调节整体控制流程图;图3为本发明中挂车车身高度的控制流程图;图4为本发明中车身平衡的控制流程图。
[0012]
图中:1车身控制主机,2储气筒,3左气囊,4右气囊,5第一车身高度调节电磁阀,6第二车身高度调节电磁阀,7第一高度传感器,8第二高度传感器,9第一压力传感器,10第二压力传感器,11提升气室,12提升阀。
具体实施方式
[0013]
下面结合附图与实施例对本发明作进一步说明。
[0014]
如图1所示,给出了本发明的基于空气悬架的挂车提桥和车身平衡的自动调节的系统原理图,其由车身高度控制主机1、储气筒2、左气囊3、右气囊4、第一车身高度调节电磁阀5、第二车身高度调节电磁阀6、第一高度传感器7、第二高度传感器8、第一压力传感器9、第二压力传感器10、提升气室11以及提升阀12组成,车身控制主机1具有信号采集、数据运算和控制输出的作用,车身控制主机1还连接有gps模块以及北斗模块,以获取挂车的地理位置信息以及计算挂车的行驶速度。图中所述的挂车设置有3个车桥,每个车桥的左右两侧分别设置左气囊3和右气囊4,最前端的1个车桥为可提升车桥。
[0015]
储气筒2的出气口经管路与第一车身高度调节电磁阀5、第二车身高度调节电磁阀6和提升阀12的进气口均相连接,第一车身高度调节电磁阀5的出气口经管路与所有车桥上的左气囊3相连通,第二车身高度调节电磁阀6的出气口经管路与所有车桥上的右气囊4相连通,提升阀12的出气口经管路与提升气室11相连通;第一车身高度调节电磁阀5、第二车身高度调节电磁阀6和提升阀12的控制端均与车身控制主机1的输出端相连接。向提升气室11中通入压力气体时,其可将需要提升的车桥(如最前端的车桥)提升起来,使需要提升的车桥(如最前端的车桥)两侧的轮胎脱离地面。向左气囊3中通入压力气体时,可使车桥左侧的车身部分抬升;向右气囊4中通入压力气体时,可使车桥右侧的车身部分抬升。同时,第一车身高度调节电磁阀5、第二车身高度调节电磁阀6和提升阀12上均设置有泄气口,以便将左气囊3、右气囊4和提升气室11中的压力气体排出。
[0016]
所示的第一高度传感器7和第二高度传感器8分别检测车身左侧的高度和车身右侧的高度,以判断车身是否发生了倾斜。所示的第一压力传感器9设置于第一车身高度调节电磁阀5与左气囊3之间的管路上,用于对左气囊3中的压力进行检测,第二压力传感器10设置于第二车身高度调节电磁阀6与右气囊4之间的管路上,用于对右气囊4中压力进行检测。车身控制主机1通过对左气囊3和右气囊4中的压力检测,可计算出挂车的载重。
[0017]
车身控制主机包含有用于同远程服务器进行gprs、3g、4g及5g通信的网络通信模块;车身控制主机包含有用于同附近蓝牙通信终端进行蓝牙通信的蓝牙通信模块;用于运程操作控制主机运行。
[0018]
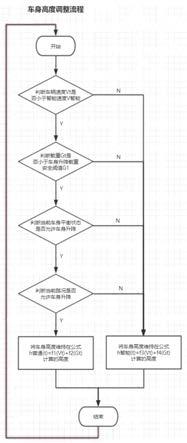
如图2、图3所示,分别给出了本发明的挂车挂车车身高度和车身平衡的自动调节整体控制流程图、车身升降的控制流程图,本发明的挂车车身高度和车身高度调节方法通过以下步骤来实现:a).车身升降速度判断,车身控制主机获取挂车当前行驶速度vt,并判断vt是否小于车身升降智能速度v
智能
,如果vt≤v
智能
,则表明当前行驶速度允许车身升降,执行步骤b);如果vt>v
智能
,执行步骤f);该步骤中,所述的车身升降速度阈值v
智能
的取值范围为0.8v
核定
~0.9v
核定
,v
核定
为挂车的最大允许速度。
[0019]
b).车身升降载重判断,车身控制主机判断当前载重gt是否小于车身升降载重安全阈值g1,如果gt≤g1,则表明挂车载重允许车身升降,执行步骤c);如果gt>g1,执行步骤f);该步骤中,所述的车身升降载重阈值g2取值范围为0.8g
核定
~0.9g
核定
,g
核定
为挂车的最大核定载重。
[0020]
c).车身平衡判断,车身控制主机经第一、第二高度传感器分别检测车身底盘左侧的高度h1和右侧的高度h2,并判断| h1-h2|是否小于阈值
△
h,如果| h1-h2|≤
△
h,表明当前车身平衡状态允许车身升降,执行步骤d),如果| h1-h2|>
△
h,执行步骤f);该步骤中,所述的阈值
△
h的取值在1~3cm范围内可调。
[0021]
d).路况判断,车身控制主机判断挂车是否处于连续转弯路段和颠簸路段,如果挂车既不处于连续转弯路段,又不处于颠簸路段,则表面路况允许车身升降,执行步骤e);如果挂车处于连续转弯或颠簸路段,执行步骤f);该步骤中,所述的路况判断通过以下方法来实现:a).连续转弯路段判断,车身控制主机通过最近时间段t1内所采集的挂车地理位置坐标信息,形成挂车的行驶路径曲线,根据行驶路径曲线判断是否存在2个或2个以上的连续转弯,如果存在,则表面当前路段为连续转弯路段,如果不存在,表明当前路段为非连续转弯路段;b).路面水平判断,车身控制主机经第一高度传感器和第二高度传感器分别采集最近时间段t2内车身左侧的高度和右侧的高度,并判断时间段t2内车身左侧和右侧的高度变化频率和幅度是否超出了安全阈值,如果超出了安全阈值,则表明挂车处于倾斜路面,如果没有超出安全阈值,则表明挂车所处路面水平;c).颠簸路段判断,车身控制主机分别经第一压力传感器和第二压力传感器采集最近时间段t3内左气囊和右气囊的压力,并判断时间段t3内左气囊或右气囊的压力变化是否超出了安全阈值,如果两者之一超出了安全阈值,则表明挂车处于颠簸路段,如果两者均没有超出安全阈值,则表明挂车处于非颠簸路段。
[0022]
e).普通高度车身升降控制,车身控制主机通过控制第一车身高度调节电磁阀和第二车身高度调节电磁阀,控制储气筒中的压力气体进入到左气囊和右气囊中或者将左气囊和右气囊中的气体放出,分别实现车身高度的提升和车身高度的降落,将车身高度调节到普通高度h
普通
,并通过第一高度传感器和第二高度传感器来反馈车身高度,将车身高度维持在利用公式(1)计算出的数值:h
普通
(t)=f1(vt)+f2(gt)
ꢀꢀ
(1)其中,h
普通
(t)为当前车身高度值,f1()为当前车速所决定的车身高度函数,f2()为当前载重所决定的车身高度函数,vt、gt分别为车辆当前速度和当前载重,即检测实时速度、载重得到的值,函数f1()、f2()均为单调递减函数;然后循环重新执行步骤a);f).智能高度车身升降控制,车身控制主机通过控制第一车身高度调节电磁阀和第二车身高度调节电磁阀,控制储气筒中的压力气体进入到左气囊和右气囊中或者将左气囊和右气囊中的气体放出,分别实现车身高度的提升或车身高度的降落,将车身高度调节到智能高度h
智能
,并通过第一高度传感器和第二高度传感器来反馈车身高度,将车身高度维持在利用公式(2)计算出的数值:
h
智能
(t)=f3(vt)+f4(gt)
ꢀꢀ
(2)其中,h
智能
(t)为当前车身目标高度值,f3()为当前车速所决定的车身高度函数,f4()为当前载重所决定的车身高度函数,vt、gt分别为车辆当前速度和当前载重,即检测实时速度、载重得到的值,函数f3()、f4()均为单调递减函数;然后循环重新执行步骤a)。
[0023]
如图4所示,给出了本发明中车身平衡的控制流程图,所示的挂车车身平衡的自动调节方法通过以下步骤来实现:1).车身平衡检测,车身控制主机经第一高度传感器和第二高度传感器分别检测车身左侧的高度h1和右侧的高度h2,并判断h1与h2的大小,如果h1<h2且h2-h1≥
△
h,则表明车身发生了左倾且倾斜程度超过了安全阈值
△
h,则执行步骤2);如果h1>h2且h1-h2≥
△
h,则表明车身发生了右倾且倾斜程度超过了安全阈值
△
h,则执行步骤3);如果| h1-h2|<
△
h,表明车身处于平衡状态,无需进行车身调整,继续进行车身平衡检测;2).左倾调整,车身控制主机通过对第一车身高度调节电磁阀的控制,使储气筒中的压力气体进入左气囊中,来提升车身左侧的高度;或者通过对第二车身高度调节电磁阀的控制,使右气囊中的气体排出,来降低车身右侧的高度,最终达到车身左右侧高度一致,使车身高度维持在利用公式(1)或公式(2)所计算出的高度上;3).右倾调整,车身控制主机通过对第二车身高度调节电磁阀的控制,使储气筒中的压力气体进入右气囊中,来提升车身右侧的高度;或者通过对第一车身高度调节电磁阀的控制,使左气囊中的气体排出,来降低车身左侧的高度,最终达到车身左右侧高度一致,使车身高度维持在利用公式(1)或公式(2)所计算出的高度上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1