轮式巡检机器人
1.本发明涉及机器人技术领域,特别涉及一种轮式机器人。
背景技术:
2.在地势崎岖不平、空间较为狭小的巡检中,传统机器人在此环境下不易通过,而且难以适应需要转向或掉头的路况,因此对于该工况中,巡检通常需要人工手持设备操作,导致效率极其低下,且劳动强度大。
3.因此需要一种应用于上述路况的巡检机器人,该巡检机器人越障能力较强,适应于崎岖的路况,可在较小空间内实现转向或者掉头。
技术实现要素:
4.有鉴于此,本发明提供一种轮式巡检机器人,该巡检机器人越障能力较强,适应于崎岖的路况,可在较小空间内实现转向或者掉头。
5.本发明的轮式巡检机器人,包括机架、行走装置和信息采集装置,所述行走装置包括安装于机架上的若干个行走轮组件以及与各个行走轮组件一一配合的动力组件,所述动力组件安装于机架上用于驱动行走轮组件转动进而实现机器人行驶,所述信息采集装置安装于机架上用于采集环境信息,所述行走轮组件转动时在与地面接触处具有x向和y向的分速度。
6.进一步,所述行走轮组件包括摆臂、减震器以及行走轮,所述摆臂可上下摆动安装于车架上,所述行走轮转动配合安装于摆臂的自由端,所述减震器连接于摆臂和车架之间以对摆臂摆动时提供缓冲作用力。
7.进一步,所述车架横向两侧各固定连接有安装臂,所述安装臂纵向延伸并在纵向两端形成两个安装部,所述两个安装部上各安装有一个行走轮组件。
8.进一步,所述行走轮包括转动配合安装于摆臂上的轮毂以及安装于轮毂上并围绕轮毂外圆的多个辊子,所述轮毂的轴线横向设置,所述辊子以轮毂轴线为中心对称分布,所述辊子的轴线与轮毂轴线呈夹角设置,所述动力组件用于驱动轮毂转动。
9.进一步,所述行走轮组件设置有四个并呈四角分布,所述四个行走轮组件对应的辊子呈o形分布。
10.进一步,所述摆臂由两块平行设置的臂板构成,所述两块壁板横向夹持于安装部两侧并与安装部转动配合。
11.进一步,所述安装臂由两块平行设置的安装板构成,所述车架侧横向侧部固定连接有安装块,所述安装板固定连接于安装块的横向两侧。
12.进一步,所述安装板纵向两端向上凸起形成安装部。
13.进一步,所述轮毂由两块轮毂钣金横向连接形成,所述轮毂钣金轴向弯曲呈波浪形并在两轮毂钣金之间形成了若干个与各辊子匹配的安装腔,所述辊子安装于安装腔内并与转动配合安装于两个轮毂钣金上。
14.进一步,所述机架包括外壳以及安装于外壳内的两层上下布置的安装板,所述安装板横向侧部向外突出与安装臂固定连接,所述信息采集装置包括安装于外壳上的红外成像仪以及摄像头。
15.本发明的有益效果:
16.本发明中可单独驱动行走轮组件的转动方向以及转动速度,以控制各个行走轮组件在x向和y向的分速度,进而使得各个行走轮组件的驱动机架可实现前进、横移、原地转向等,利于适配崎岖不平的地势,并且可满足在狭小的空间中的横移、转向等运行要求,可替代人工巡检,降低人工劳动量,另外各个行走轮组可分别控制并结合x向和y向的分速度,利于提高巡检机器人越障能力;
17.本发明中减震器为摆臂摆动过程中提供与摆动相反的作用力,通过该结构实现良好的减震特性,使得车身能在运行过程中更加平稳;每个安装臂上集成有两个行走轮组件以及配套的减震器,该结构利于将整个机器人实现模块化,利于机器人的快速装配。
附图说明
18.下面结合附图和实施例对本发明作进一步描述。
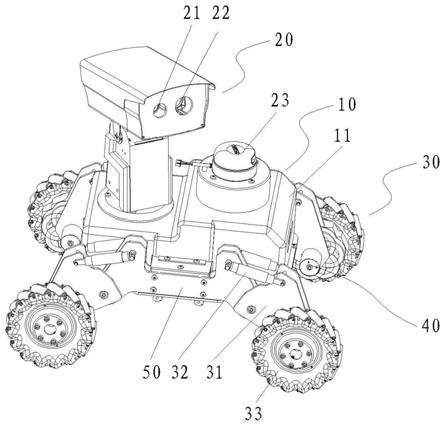
19.图1为本发明整体结构示意图;
20.图2为行走装置结构示意图;
21.图3为机架结构示意图;
22.图4为俯视结构示意图;
23.图5为前进结构示意图;
24.图6为横移结构示意图;
25.图7为原地转向结构示意图;
具体实施方式
26.如图所示:本实施例的轮式巡检机器人,包括机架10、行走装置和信息采集装置20,所述行走装置包括安装于机架上的若干个行走轮组件30以及与各个行走轮组件一一配合的动力组件40,所述动力组件安装于机架上用于驱动行走轮组件转动进而实现机器人行驶,所述信息采集装置安装于机架上用于采集环境信息,所述行走轮组件转动时在与地面接触处具有x向和y向的分速度。x向为机器人车身长度方向,y向为机器人车身宽度方向,行走轮组件优选四个并围绕机架呈四角布置,动力组件相应的设置四组分别驱动各行走轮组件,动力组件采用电机,通过电机直接驱动行走轮组件转动,可单独控制行走轮组件的转动方向以及转动速度,以控制各个行走轮组件在x向和y向的分速度,进而使得各个行走轮组件的驱动机架可实现前进、横移、原地转向等,利于适配崎岖不平的地势,并且可满足在狭小的空间中的横移、转向等运行要求,可替代人工巡检,降低人工劳动量,另外各个行走轮组可分别控制并结合x向和y向的分速度,利于提高巡检机器人越障能力。
27.本实施例中,所述行走轮组件包括摆臂31、减震器32以及行走轮33,所述摆臂可上下摆动安装于车架上,所述行走轮33转动配合安装于摆臂的自由端,所述减震器32连接于摆臂和车架之间以对摆臂摆动时提供缓冲作用力。车架由铝合金框架搭建而成,减震器32采用弹簧减震器、空气减震器或者液压减震器,可依据所需要选用现有的减震器结构,结合
图2所示,减震器32为摆臂摆动过程中提供与摆动相反的作用力,通过该结构实现良好的减震特性,使得车身能在运行过程中更加平稳。
28.本实施例中,所述车架横向两侧各固定连接有安装臂50,所述安装臂纵向延伸并在纵向两端形成两个安装部51,所述两个安装部51上各安装有一个行走轮组件。横向与车身宽度方向一致,也与y向方向一致;结合图1和图2所示,在车架上安装有四个行走轮组件,每个安装臂上安装有两个行走轮组件,其中在安装臂内侧安装有动力组件40用于驱动相应的行走轮组件转动,该结构利于将整个机器人实现模块化,利于机器人的快速装配。
29.本实施例中,所述行走轮33包括转动配合安装于摆臂上的轮毂以及安装于轮毂上并围绕轮毂外圆的多个辊子33a,所述轮毂的轴线横向设置,所述辊子33a以轮毂轴线为中心对称分布,所述辊子的轴线与轮毂轴线呈夹角设置,所述动力组件用于驱动轮毂转动。结合图1和图2所示,辊子的轴线与轮毂轴线呈45
°
,且各个行走轮组件的辊子倾斜方向一致,各个行走轮组件的辊子倾斜方向可依据实际所需进行调整,通过辊子的自由转动实现行走轮组件在x向和y向方向的分速度。
30.本实施例中,所述行走轮组件设置有四个并呈四角分布,所述四个行走轮组件对应的辊子33a呈o形分布。o形分布的具体形式可结合图4和图5所示,图4为行走轮组件分布的另一实施例,图5为图4中四个行走轮组件与地面接触处辊子的分布形态,图5中与地面接触处的辊子合围成近似o形的结构,故称为o形分布,结合图5所示,四个轮毂的转向和转速相同,此时由于y向分速度相互抵消,机器人正常向前行走,结合图6所示,对角的两组轮毂转向相反,此时x向分速度相互抵消,机器人横向行走,结合图7所示,横向一侧的两个轮毂向前转动,另一侧的两个轮毂向后转动,通过控制各个轮毂的转向可实现机器人的原地转向。
31.本实施例中,所述摆臂31由两块平行设置的臂板31a构成,所述两块壁板横向夹持于安装部51两侧并与安装部转动配合。结合图2和图3所示,两个臂板31a呈三角结构,在靠近壁板三个角处各设置三个转轴,其中一个转轴与安装部转动配合,另一个转轴与减震器32一端转动配合,剩下的转轴与行走轮组件转动配合,且三个转轴两侧均有阶梯轴,通过阶梯轴保持了两个壁板之间的间隙恒定,使得两个壁板形成了框架结构,提高摆臂的结构强度和刚度。
32.本实施例中,所述安装臂50由两块平行设置的安装板52构成,所述车架侧横向侧部固定连接有安装块53,所述安装板52固定连接于安装块的横向两侧。结合图2和图3所示,安装块53位于两块安装板且与两块安装板固定连接,安装块作为两块安装板之间的支撑结构,同时也作为安装板52的安装基础,安装板固定于安装块上并支撑于下安装板上。
33.本实施例中,所述安装板52纵向两端向上凸起形成安装部。结合图2所示,安装板中间窄纵向两头宽,纵梁两头作为安装部,利于与减震器以及摆臂的配合。
34.本实施例中,所述轮毂由两块轮毂钣金33b横向连接形成,所述轮毂钣金轴向弯曲呈波浪形并在两轮毂钣金之间形成了若干个与各辊子匹配的安装腔,所述辊子安装于安装腔内并与转动配合安装于两个轮毂钣金上。结合图2所示,两块轮毂钣金33b通过螺栓紧固,且两块轮毂钣金33b之间形成了若干个与辊子平行的矩形安装腔,每个辊子均独立滚动安装于各自的矩形安装腔内,配合该结构的轮毂钣金33b利于各个辊子的安装。
35.本实施例中,所述机架10包括外壳11以及安装于外壳内的两层上下布置的安装板
12,所述安装板横向侧部向外突出与安装臂50固定连接,所述信息采集装置20包括安装于外壳上的红外成像仪21以及摄像头22。在外壳外还集成有激光雷达23和深度相机24,二者形成导航系统,用来实现室内外的定位、导航和路径规划功能;红外成像仪21以及摄像头22用于检测目标场景,记录视频、声音及温度等特征,其中红外成像仪21以及摄像头22安装于二轴云台上以调节检测角度;两层安装板用于在机器人内部留设足够的安装空间,其中在安装板上安装有上位机板载电脑用于控制激光雷达、深度相机以及摄像头,并与下位机通讯,安装板上还安装有上位机电池板为上位机供电,当然,在外壳处也可安装其他类型的传感器,例如湿度传感器等,具体不在赘述;
36.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1