传感器系统的制作方法
1.本公开涉及搭载于车辆的传感器系统。
背景技术:
2.为了进行车辆的驾驶辅助,在车身搭载有用于检测该车辆的外部信息的传感器。专利文献1公开了作为这样的传感器的雷达。
3.本说明书中使用的“驾驶辅助”这一词语的意思是至少部分进行驾驶操作(方向盘操作、加速、减速等)、行驶环境的监视以及驾驶操作的备份的至少一个的控制处理。即,意味着包含从碰撞损害减少制动功能、车道保持辅助功能那种部分驾驶辅助到完全自动驾驶动作。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利申请公开2007-106199号公报
技术实现要素:
7.发明将要解决的课题
8.要求抑制由搭载于车辆的传感器的信息检测能力的降低。
9.用于解决课题的手段
10.用于应对上述的要求的一方式为一种搭载于车辆的传感器系统,具备:
11.传感器,其输出与所述车辆的外部的信息对应的信号;以及
12.除雾装置,其朝向所述传感器的检测区域的至少一部分供给水、化合物、暖风、带电微粒、超声波以及红外线的至少一个。
13.所述传感器可包含lidar(light detection and ranging)传感器、相机、毫米波雷达以及超声波传感器的至少一个。
14.雾是微小的水滴在大气中浮游的现象。传感器在信息的检测中使用的非可见光、毫米波、超声波供于构成水滴的水分子的吸收。因而,在向产生了雾的大气中出射非可见光、毫米波、超声波的情况下,有可能无法获得足以检测信息的反射光、反射波。在传感器是相机的情况下,担心由于雾而视场变得不清楚,无法取得希望的图像信息。
15.根据上述那样的构成,能够在包含传感器的检测区域的空间形成使雾变薄的环境条件。因而,能够抑制雾所引起的传感器的信息检测能力的降低。
16.例如供给的水与在待机中浮游而形成雾的微小的水滴结合。伴随着结合,大小与重量增加,使得水滴不再能够在大气中浮游,而是向地面落下。由此,能够使雾变薄或者消失。
17.在供给化合物、带电微粒、超声波、红外线的至少一个的情况下,促进在待机中浮游而形成雾的微小的水滴彼此的凝结。伴随着凝结,大小与重量增加,使得水滴不再能够在大气中浮游,而是向地面落下。由此,能够使雾变薄或者消失。
18.化合物可包含氯化钠、氯化钙以及碘化银的至少一个。
19.雾由水蒸气压达到饱和状态的微小的水滴形成。在被供给暖风的情况下,被吹送了暖风的路面、空间的温度上升,使得饱和蒸气压也进一步上升。微小的水滴由于其水蒸气压不会达到饱和状态,因此不能形成雾。由此,能够使雾变薄或者消失。
20.上述的传感器系统可如以下那样构成。
21.具备基于所述信号使所述除雾装置起动的处理器。
22.例如若处理器判断为在从传感器输出的信号(或者对应的信息)的质量中确认到显著的恶化,则使除雾装置起动。根据这种构成,能够使用于抑制传感器的信息检测能力的降低的除雾动作自动化。
23.上述的传感器系统可如以下那样构成。
24.具备与雾灯的点亮连动地使所述除雾装置起动的处理器。
25.在雾灯点亮了的情况下,产生了雾的可能性较高。因而,通过构成为与雾灯的点亮连动地使除雾装置起动,能够使用于抑制传感器的信息检测能力的降低的除雾动作自动化。
附图说明
26.图1例示了一实施方式的传感器系统的构成。
27.图2示出了图1的传感器系统的另一构成例。
具体实施方式
28.以下,参照添附的附图,详细地说明实施方式的例子。在以下的说明所使用的各附图中,为了使各部件成为能够识别的大小而适当变更了比例尺。
29.在添附的附图中,箭头f表示图示的构造的前方向。箭头b表示图示的构造的后方向。箭头u表示图示的构造的上方向。箭头d表示图示的构造的下方向。
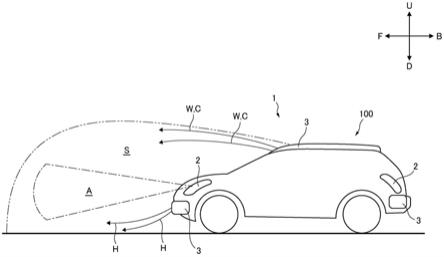
30.图1例示了一实施方式的传感器系统1的构成。传感器系统1搭载于车辆100。车辆100的车身的形状只不过是例示。
31.传感器系统1具备传感器2。传感器2搭载于车辆100中的适当的部位,检测车辆100的外部信息。
32.传感器2例如是lidar传感器。lidar传感器具备朝向车辆100的外部出射非可见光的构成以及检测该非可见光被存在于车辆100的外部的物体反射的结果的返回光的构成。lidar传感器可以根据需要而具备变更出射方向(即检测方向)而扫描该非可见光的扫描机构。非可见光的波长例如为905nm。
33.lidar传感器例如能够基于从向某一方向出射非可见光的定时到检测返回光为止的时间,检测到与该返回光建立了关联的到物体的距离。另外,通过将这样的距离数据与检测位置建立关联而累积,能够检测与返回光建立了关联的物体的形状的信息。除此之外或者取而代之,能够基于出射光与返回光的波形的不同,检测与返回光建立了关联的物体的材质等属性的相关信息。lidar传感器构成为输出与检测出的信息对应的信号。
34.传感器2例如是相机。相机是用于取得车辆100的外部的图像信息的装置。图像可包括静止图像与运动图像的至少一方。相机构成为输出与所取得的图像信息对应的信号。
35.传感器2例如是毫米波雷达。毫米波雷达具备发送毫米波的构成以及接收该毫米波被位于车辆100的外部的物体反射的结果的反射波的构成。毫米波的频率例如是24ghz、26ghz、76ghz、79ghz中的某一个。
36.毫米波雷达例如能够基于从向某一方向发送毫米波的定时到接收反射波为止的时间,检测到与该反射波建立了关联的物体的距离。另外,通过将这样的距离数据与检测位置建立关联地累积,能够取得与反射波建立了关联的物体的移动的相关信息。毫米波雷达构成为将检测出的信息所对应的信号输出。
37.传感器2例如是超声波传感器。超声波传感器具备发送超声波(几十khz~几ghz)的构成以及接收该超声波被位于车辆100的外部的物体反射的结果的反射波的构成。
38.超声波传感器例如能够基于从向某一方向发送超声波的定时到接收反射波为止的时间,检测到与该反射波建立了关联的物体的距离。另外,通过将这样的距离数据与检测位置建立关联地累积,能够取得与反射波建立了关联的物体的移动的相关信息。超声波传感器构成为将检测出的信息所对应的信号输出。
39.雾是微小的水滴浮游在大气中的现象。传感器2所使用的非可见光、毫米波、超声波供于构成水滴的水分子的吸收。因而,在向产生了雾的大气中出射非可见光、毫米波、超声波的情况下,有可能无法获得足以检测信息的反射光、反射波。在传感器2是相机的情况下,担心由于雾而视场变得不清楚,无法取得希望的图像信息。
40.为了应对该问题,传感器系统1具备除雾装置3。除雾装置3是在包括能够由传感器2检测信息的检测区域a的空间s内形成使雾变薄的环境条件的装置。
41.除雾装置3可根据传感器2的检测区域a的位置搭载于车辆100中的适当部位。在图1所示的例子中,除雾装置3配置于车辆100的顶棚部。
42.除雾装置3例如是朝向传感器2的检测区域a的至少一部分喷射水w的装置。
43.喷射的水w与待机中浮游而形成雾的微小的水滴结合。伴随着结合,大小与重量增加,使得水滴不再能够在大气中浮游,而是向地面落下。由此,能够使喷雾变薄或消失。
44.除雾装置3例如是朝向传感器2的检测区域a的至少一部分喷射化合物c的装置。作为化合物c的例子,可列举氯化钠、氯化钙以及碘化银等。化合物c也可以与水w混合。
45.喷射的这些化合物c促进在待机中浮游而形成雾的微小的水滴彼此的凝结。伴随着凝结,大小与重量增加,使得水滴不再能够在大气中浮游,而是向地面落下。由此,能够使雾变薄或者消失。
46.也可以在上述的化合物的基础上或者取代于此,为了促进形成雾的微小的水滴彼此的凝结而朝向传感器2的检测区域a的至少一部分供给带电微粒、超声波以及红外线的至少一个。但是,在传感器2是超声波传感器的情况下,为了避免干扰,除雾装置3不使用超声波。同样,在传感器2在信息的检测中使用红外线的情况下,为了避免干扰,除雾装置3不使用红外线。
47.在上述的构成的基础上或者取代于此,除雾装置3可以包括朝向传感器2的检测区域a的至少一部分供给暖风h的装置。在图1所示的例子中,在车辆100的前端部配置有该装置。
48.雾由水蒸气压达到饱和状态的微小的水滴形成。被吹送了暖风h的路面、空间的温度上升,使得饱和蒸气压也进一步上升。微小的水滴由于其水蒸气压不会达到饱和状态,因
此不能形成雾。由此,能够使雾变薄或者消失。
49.通过上述的各方法,能够在包含传感器2的检测区域a的空间s形成使雾变薄的环境条件。图1中的双点划线表示如此控制了环境条件的空间s与通常的大气的界面。由此,能够抑制雾所引起的传感器2的信息检测能力的降低。
50.由除雾装置3进行的水w,化合物c、暖风h、带电粒子、超声波以及红外线的至少一个的供给可以连续地进行,也可以断续地进行。
51.如图2所例示,传感器系统1可以具有控制装置4。控制装置4可以具有输入接口41、处理器42、以及输出接口43。控制装置4可搭载于车辆100中的适当的位置。
52.如前述那样,传感器2将检测出的信息所对应的传感器信号s1输出。输入接口41受理从传感器2输出的传感器信号s1。输入接口41可以根据需要包含将传感器信号s1转换为适合于由处理器42进行的处理的方式的信号处理电路。
53.处理器42构成为,基于从传感器2受理的传感器信号s1控制除雾装置3的动作。具体而言,处理器42判断在传感器信号s1(或者对应的信息)的质量中是否确认到显著的恶化。“显著的恶化”的意思是不能获得希望的信号等级、信号波形的状态。处理器42在传感器信号s1的质量中确认到显著的恶化的情况下,生成使除雾装置3起动的控制信号s2。
54.处理器42从输出接口43输出控制信号s2。除雾装置3若受理控制信号s2,则执行前述的除雾动作。输出接口43可以根据需要包括将控制信号s2转换为适合于由除雾装置3进行的处理的方式的信号处理电路。
55.根据这种构成,能够使用于抑制传感器2的信息检测能力的降低的除雾动作自动化。
56.处理器42持续监视输入接口41受理的传感器信号s1的质量。在通过除雾装置3的动作对传感器信号s1的质量确认到恢复的情况下,处理器42生成使除雾装置3的动作停止的控制信号s3,并从输出接口43输出。输出接口43可以根据需要包括将控制信号s3转换为适合于除雾装置3进行的处理的方式的信号处理电路。除雾装置3若受理控制信号s3,则使除雾动作停止。
57.也可以除此之外或者取而代之,由输入接口41受理表示搭载于车辆100的雾灯101点亮了的点亮信号s4。在该情况下,输入接口41可以根据需要包括将点亮信号s4转换为适合由处理器42进行的处理的方式的信号处理电路。
58.处理器42构成为与雾灯101的点熄灭连动地控制除雾装置3的动作。具体而言,若输入接口41受理点亮信号s4,则处理器42生成使除雾装置3起动的控制信号s2,并从输出接口43输出。除雾装置3在受理控制信号s2后,执行前述的除雾动作。
59.在雾灯101点亮的情况下,产生了雾的可能性较高。因而,通过构成为与雾灯101的点亮连动地使除雾装置3起动,能够使用于抑制传感器2的信息检测能力的降低的除雾动作自动化。
60.若雾灯101熄灭,则点亮信号s4消失。在该情况下,处理器42生成使除雾装置3的动作停止的控制信号s3,并从输出接口43输出。除雾装置3在受理控制信号s3后,使除雾动作停止。
61.能够执行上述的处理的处理器42也可以作为与通用存储器协作地动作的通用微处理器而提供,也可以作为专用集成电路元件的一部分而提供。作为通用微处理器,可例示
cpu、mpu、gpu等。作为通用存储器,可例示ram、rom。作为专用集成电路元件,可例示微型控制器、asic、fpga等。
62.上述的实施方式仅仅是为了易于理解本公开的示例。上述的实施方式的构成只要不脱离本公开的主旨,就能够适当地变更、改进。
63.参照图1,说明了用于抑制与位于车辆100的至少前方的区域的信息相关的传感器2的检测能力的降低的除雾动作。如该图所例示,传感器2可配置成检测位于车辆100的至少后方的区域的信息。在该情况下,虽然省略图示,除雾装置3构成为朝向位于车辆100的至少后方的传感器2的检测区域的至少一部分供给水、化合物、暖风、带电微粒、超声波以及红外线的至少一个。
64.作为构成本公开的一部分的内容,引用了2019年3月20日提出的日本专利申请2019
‑
052838号的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1