应用有多旋翼无人机的车辆的制作方法
1.本发明涉及汽车领域,特别涉及一应用有多旋翼无人机的车辆。
背景技术:
2.近年来,多旋翼无人机的发展迅猛且得到了快速的普及。多旋翼无人机在移动摄像领域得到了长足的发展,这使得应用于多旋翼无人机的摄像技术日趋成熟。现有的多旋翼无人机和车辆是两个独立的设备,发挥各自特有的功能,虽然有人尝试将多旋翼无人机和车辆相结合,但是其技术思路是将车辆作为多旋翼无人机的升降平台来使用,例如在公告号为cn206984419u的中国实用新型专利中,其在车辆的顶部设置容纳仓,容纳仓内设置有升降平台,以供升降旋翼无人机,其存在的缺陷是,在旋翼无人机降落到升降平台而被固定于容纳仓后,旋翼无人机完全处于停机状态,无法发挥其优势功能。
技术实现要素:
3.本发明的一个目的在于提供一应用有多旋翼无人机的车辆,其中一多旋翼无人机的一机载摄像头能够替代一车辆主体的多个车载摄像头中的一个,以在所述多旋翼无人机降落到所述车辆主体后,所述多旋翼无人机的优势功能能够被继续沿用。例如,所述多旋翼无人机的所述机载摄像头能够替代所述车辆主体的后置车载摄像头,以供拍摄所述车辆主体的后方环境的影像。
4.本发明的一个目的在于提供一应用有多旋翼无人机的车辆,其中在所述多旋翼无人机降落到所述车辆主体后,所述多旋翼无人机能够被电连接于所述车辆主体的一车载电池,以允许所述车载电池的电能能够被补充至所述多旋翼无人机的一机载电池,如此实现所述多旋翼无人机的自动充电。
5.本发明的一个目的在于提供一应用有多旋翼无人机的车辆,其中在所述多旋翼无人机降落到所述车辆主体后,所述多旋翼无人机的所述机载摄像头能够直接自所述车辆主体的所述车载电池取电,即,降落到所述车辆主体的所述多旋翼无人机的所述机载电池的电能不再供给所述机载摄像头,如此在所述多旋翼无人机离开所述车辆主体时,所述多旋翼无人机的所述机载电池能够被保证有充足的电能。
6.本发明的一个目的在于提供一应用有多旋翼无人机的车辆,其中在所述多旋翼无人机降落到所述车辆主体后,所述多旋翼无人机的一机载通信单元和所述车辆主体的一车载通信单元有线连接,以减少电能消耗,并保证通信质量的可靠性。
7.本发明的一个目的在于提供一应用有多旋翼无人机的车辆,其中所述车辆主体提供一升降平台,一方面,所述升降平台基于磁力允许所述多旋翼无人机精准地降落,另一方面,所述升降平台基于机械结构可靠地固定所述多旋翼无人机,以避免降落后的所述多旋翼无人机移位。例如,所述升降平台提供一对固持臂,一对所述固持臂于所述多旋翼无人机的机身的相对两侧固定所述多旋翼无人机于所述升降平台。
8.本发明的一个目的在于提供一应用有多旋翼无人机的车辆,其中一对所述固持臂
中的一个所述固持臂具有供电能力,以将所述车辆主体的所述车载电池的电能供给所述多旋翼无人机的所述机载电池和所述机载摄像头,另一个所述固持臂具有通信能力,以实现所述车辆主体的所述车载通信单元和所述多旋翼无人机的所述机载通信单元之间的有线通信连接。
9.本发明的一个目的在于提供一应用有多旋翼无人机的车辆,其中所述车辆主体提供一升降仓和被设置于所述升降仓的一透镜单元,所述升降平台被设置于所述升降仓,以允许所述多旋翼无人机降落至所述升降仓,其中处于所述升降仓的所述多旋翼无人机的所述机载摄像头能够对准所述透镜单元,以允许外部光线在穿过所述透镜单元后被所述机载摄像头接收而拍摄所述车辆主体的后方环境的影像。
10.依本发明的一个方面,本发明提供一应用有多旋翼无人机的车辆,其包括:
11.一多旋翼无人机,其中所述多旋翼无人机包括一机身以及分别被设置于所述机身的一机载电池、一机载摄像头和一机载通信单元,所述机载摄像头和所述机载通信单元被电连接于所述机载电池;和
12.一车辆主体,其中所述车辆主体包括一车身以及分别被设置于所述车身的一车载电池、一前置车载摄像头、两侧置车载摄像头以及一车载通信单元,所述前置车载摄像头、所述后置车载摄像头和所述车载通信单元分别被电连接于所述车载电池,其中所述多旋翼无人机能够被降落至所述车身的后方,以允许所述机载摄像头拍摄所述车身的后方环境的影像,其中所述机载通信单元和所述车载通信单元被可通信地连接。
13.根据本发明的一个实施例,所述车辆主体进一步包括一升降平台,所述升降平台包括一平台主体和被可活动地设置于所述平台主体的两固持臂,两个所述固持臂能够分别于所述机身的相对两侧固持所述多旋翼无人机,以允许所述多旋翼无人机被可靠地固定于所述平台主体。
14.根据本发明的一个实施例,所述车辆主体进一步包括一供电单元,所述供电单元包括两个供电元件,两个所述供电元件分别被相邻地设置于一个所述固持臂,并且两个所述供电元件分别被电连接于所述车载电池,其中所述多旋翼无人机进一步包括一受电单元,所述受电单元包括两个受电元件,两个所述受电元件分别被相邻地设置于所述机身的一个侧部,并且两个所述受电元件分别被电连接于所述机载电池,其中所述供电单元的每个所述供电元件和所述受电单元的每个所述受电元件分别接触而被电连接。
15.根据本发明的一个实施例,所述车载通信单元包括一第一有线通信模块,所述第一有线通信模块包括两个车载通信元件,两个所述车载通信元件分别被相邻地设置于另一个所述固持臂,所述机载通信单元包括一第二有线通信模块,所述第二有线通信模块包括两个所述机载通信元件,两个所述机载通信元件分别被相邻地设置于所述机身的另一侧,所述第一有线通信模块的每个所述车载通信元件和所述第二有线通信模块的每个所述机载通信元件分别接触而被电连接。
16.根据本发明的一个实施例,所述车载通信单元包括一第一无线通信模块,所述第一无线通信模块被电连接于所述车载电池,所述机载通信单元包括一第二无线通信模块,所述第二无线通信模块被电连接于所述机载电池,其中所述第一无线通信模块和所述第二无线通信模块被可通信地连接,以向所述车辆主体传输所述机载摄像头拍摄的影像数据。
17.根据本发明的一个实施例,所述升降平台进一步包括一车载磁性元件,所述车载
磁性元件被设置于所述平台主体且位于两个所述固持臂之间,其中所述多旋翼无人机进一步包括一机载磁性元件,所述机载磁性元件被设置于所述机身的下方,其中所述车载磁性元件和所述机载磁性元件能够相互作用而引导所述多旋翼无人机降落至所述平台主体。
18.根据本发明的一个实施例,所述车载磁性元件是电磁元件,其被电连接于所述车载电池。
19.根据本发明的一个实施例,所述车辆主体进一步包括一升降仓和一透镜单元,所述升降仓包括一仓体和一仓盖,所述仓体由所述车身的后备箱盖凹陷的方式形成,以使所述仓体形成一仓体空间和连通于所述仓体空间的一升降开口,所述仓盖被设置于所述仓体,所述透镜单元被设置于所述仓体,以允许光线透过而辐射至所述仓体空间,其中所述升降平台被设置于所述仓体的所述仓体空间,并且在所述多旋翼无人机降落至所述升降平台后,所述多旋翼无人机的所述机载摄像头对准所述透镜单元。
20.根据本发明的一个实施例,所述仓盖被可滑动地安装于所述仓体,以封闭或暴露所述仓体的所述升降开口。
21.根据本发明的一个实施例,所述升降开口形成于所述仓体的侧部。
附图说明
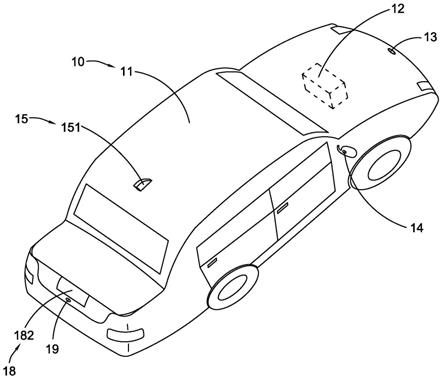
22.图1是依本发明的一较佳实施例的一应用有多旋翼无人机的车辆的立体示意图。
23.图2是依本发明的上述较佳实施例的所述车辆的一车辆主体的局部结构示意图。
24.图3a是依本发明的上述较佳实施例的所述车辆的一多旋翼无人机的一个视角的立体示意图。
25.图3b是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的另一个视角的立体示意图。
26.图4a是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的起飞过程之一的示意图。
27.图4b是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的起飞过程之二的示意图。
28.图4c是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的起飞过程之三的示意图。
29.图4d是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的起飞过程之四的示意图。
30.图5a是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的降落过程之一的示意图。
31.图5b是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的降落过程之二的示意图。
32.图5c是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的起飞过程之一的示意图。
33.图5d是依本发明的上述较佳实施例的所述车辆的所述多旋翼无人机的起飞过程之四的示意图。
具体实施方式
34.在详细说明本发明的任何实施方式之前,应理解的是,本发明在其应用中并不限于以下描述阐述或以下附图图示的部件的构造和布置细节。本发明能够具有其他实施方式并且能够以各种方式实践或进行。另外,应理解的是,这里使用的措辞和术语出于描述的目的并且不应该被认为是限制性的。本文中使用“包括”、“包括”或“具有”及其变型意在涵盖下文中陈列的条目及其等同物以及附加条目。除非另有指定或限制,否则术语“安装”、“连接”、“支撑”和“联接”及其变型被广泛地使用并且涵盖直接安装和间接的安装、连接、支撑和联接。此外,“连接”和“联接”不限于物理或机械的连接或联接。
35.并且,第一方面,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制;第二方面,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
36.参考本发明的说明书附图之附图1至图5d,依本发明的一较佳实施例的一应用有多旋翼无人机的车辆在接下来的描述中将被揭露和被阐述,其中所述车辆包括一车辆主体10和一多旋翼无人机20。
37.所述车辆主体10包括一车身11、一车载电池12、一前置车载摄像头13以及两侧置车载摄像头14,其中所述车载电池12被设置于所述车身11,其中所述前置车载摄像头13被设置于所述车身11的前方和被电连接于所述车载电池12,以在所述车载电池12向所述前置车载摄像头13供电时拍摄所述车辆主体10的前方的影像,其中每个所述侧置车载摄像头14分别被设置于所述车身11的每个侧方和分别被电连接于所述车载电池12,以在所述车载电池12向每个所述侧置车载摄像头14供电时拍摄所述车辆主体10的每个侧方的影像。
38.值得一提的是,本发明的所述车辆可以是燃油车辆,也可以是电动车辆,其中在所述车辆是电动车辆的示例中,所述车载电池12为所述车身11提供电能而允许所述车身11的电动机输出动力。
39.所述多旋翼无人机20包括一机身21、一机载电池22以及一机载摄像头23,其中所述机载电池22被设置于所述机身21,以为所述机身21提供电能而允许所述机身21的电动机输出动力,其中所述机载摄像头23被设置于所述机身21和被电连接于所述机载电池22,以拍摄影像。
40.在本发明的所述车辆中,所述多旋翼无人机20具有一飞行状态和一固定状态,其中当所述多旋翼无人机20自所述车辆主体10的所述车身11起飞后处于所述飞行状态,此时所述多旋翼无人机20的所述机载摄像头23能够单独地拍摄影像,其中当所述多旋翼无人机20降落至所述车辆主体10的所述车身11的后方后处于所述固定状态,此时所述多旋翼无人机20的所述机载摄像头23能够拍摄所述车身11的后方环境的影像。换言之,所述多旋翼无人机20的所述机载摄像头23能够替代所述车辆主体10的后置车载摄像头,以供拍摄所述车辆主体10的所述车身11的后方环境的影像,如此所述多旋翼无人机20的优势功能能够被继续沿用。
41.在本发明的一个较佳示例中,所述车辆主体10的所述前置车载摄像头13拍摄的影像、每个所述侧置车载摄像头14拍摄的影像、处于所述固定状态的所述多旋翼无人机20的所述机载摄像头23拍摄的影像能够分别被单独地显示于所述车辆主体10的一中控屏幕,以供驾驶所述车辆的驾驶员通过所述中控屏幕单独地查看所述车身11的前方、每个侧方和后方的环境。
42.在本发明的另一个较佳示例中,所述车辆主体10的所述前置车载摄像头13拍摄的影像、每个所述侧置车载摄像头14拍摄的影像、处于所述固定状态的所述多旋翼无人机20的所述机载摄像头23拍摄的影像能够被合成以形成一个全景影像,所述全景影像被显示于所述车辆主体10的所述中控屏幕,以供驾驶所述车辆的驾驶员通过所述中控屏幕查看所述车身11的周围环境的影像。
43.值得一提的是,合成多个摄像头拍摄的影像以得到所述全景影像的技术是现有技术,其在量产车辆上已被广泛地应用,本发明不再赘述。
44.为了实现所述车辆主体10和所述多旋翼无人机20之间的通信,以将所述多旋翼无人机20的所述机载摄像头23拍摄的影像传输至所述车辆主体10,所述车辆主体10进一步包括一车载通信单元15,所述车载通信单元15被设置于所述车身11,相应地,所述多旋翼无人机20进一步包括一机载通信单元24,所述机载通信单元24被设置于所述机身21,其中所述车载通信单元15和所述机载通信单元24能够被通信地连接,如此所述多旋翼无人机20的所述机载摄像头23拍摄的影像能够被传输至所述车辆主体10。
45.进一步地,所述车载通信单元15包括一第一无线通信模块151,所述第一无线通信模块151被电连接于所述车载电池12,以自所述车载电池12获取电能而处于工作状态,相应地,所述机载通信单元24包括一第二无线通信模块241,所述第二无线通信模块241被电连接于所述机载电池22,以自所述机载电池22获取电能而处于工作状态,其中所述第一无线通信模块151和所述第二无线通信模块241能够被通信地连接,以基于无线通信技术将所述多旋翼无人机20的所述机载摄像头23拍摄的影像传输至所述车辆主体10。可以理解的是,在有效通信距离范围内,处于所述飞行状态的所述多旋翼无人机20的所述机载摄像头23拍摄的影像也可以通过所述第二无线通信模块241和所述第一无线通信模块151传输至所述车辆主体10。
46.值得一提的是,无线远距离通信技术是现有技术,其在无人机上已经被广泛地引用,本发明不再赘述。
47.进一步地,所述车载通信单元15包括一第一有线通信模块152,所述第一有线通信模块152包括两个车载通信元件1521,相应地,所述机载通信单元24包括一第二有线通信模块242,所述第二有线通信模块242包括两个机载通信元件2421,其中在所述多旋翼无人机20降落至所述车辆主体10后,所述第二有线通信模块242的两个所述机载通信元件2421能够自动地接触所述第一有线通信模块152的两个所述车载通信元件1521,并且在所述多旋翼无人机20处于所述固定状态时,即便是所述车辆出现颠簸,所述述第二有线通信模块242的两个所述机载通信元件2421和所述第一有线通信模块152的两个所述车载通信元件1521也能够被保持接触,以保证所述车载通信单元15和所述机载通信单元24的有线通信的可靠性。
48.所述多旋翼无人机20和所述车辆主体10之间通过有线通信实现将所述多旋翼无
人机20的所述机载摄像头23拍摄的影像传输至所述车辆主体10的方式,一方面,因所述多旋翼无人机20的所述机载电池22不再需要向所述机载通信单元24供电而能够减少电能消耗,另一方面,所述多旋翼无人机20和所述车辆主体10的通信质量能够被保证,尤其是当所述车辆行驶到复杂环境时,例如地形地貌复杂的环境或者电磁波复杂的环境,所述多旋翼无人机20和所述车辆主体10之间的通信不易被干扰,从而确保所述多旋翼无人机20和所述车辆主体10之间的可靠通信。
49.换言之,本发明的所述车辆的所述车辆主体10和所述多旋翼无人机20之间既可以基于无线通信技术实现影像数据的传输,也可以基于有线通信技术实现影像数据的传输,所述车辆主体10和所述多旋翼无人机20的通信方式取决于所述多旋翼无人机20所处的状态,当所述多旋翼无人机20处于所述飞行状态时,所述车辆主体10和所述多旋翼无人机20之间基于无线通信技术实现影像数据的传输,当所述多旋翼无人机20处于所述固定状态时,所述车辆主体10和所述多旋翼无人机20之间基于有线通信技术实现影像数据的传输。
50.优选地,在本发明的所述车辆的一个具体示例中,在所述多旋翼无人机20自所述飞行状态向所述固定状态切换时,所述车辆主体10和所述多旋翼无人机20之间需要同时采用无线通信和有线通信来实现通信,即,所述车辆主体10的所述第一无线通信模块151和所述多旋翼无人机20的所述第二无线通信模块241通信连接,所述车辆主体10的所述第一有线通信模块152和所述多旋翼无人机20的所述第二有线通信模块242通信连接,以避免所述车辆主体10和所述多旋翼无人机20的通信中断而导致所述多旋翼无人机20失联。在所述多旋翼无人机20保持在所述固定状态后,所述车辆主体10的所述第一无线通信模块151和所述多旋翼无人机20的所述第二无线通信模块241可以断开通信,而仅依靠所述车辆主体10的所述第一有线通信模块152和所述多旋翼无人机20的所述第二有线通信模块242通信连接来实现影像数据的传输。
51.进一步地,继续参考附图1至图5d,在所述多旋翼无人机20降落到所述车辆主体10后,所述多旋翼无人机20的所述机载电池22能够电连接于所述车辆主体10的所述车载电池12,以允许所述车载电池12将电能补充至所述机载电池22。
52.具体地,所述车辆主体10进一步包括一供电单元16,所述供电单元16包括两个供电元件161,两个所述供电元件161分别被电连接于所述车载电池12,相应地,所述多旋翼无人机20进一步包括一受电单元25,所述受电单元25包括两个受电元件251,两个所述受电元件251分别被电连接于机载电池22,其中在所述多旋翼无人机20处于所述固定状态时,所述多旋翼无人机20的每个所述受电元件251和所述车辆主体10的每个所述供电元件161连接,以允许所述所述车载电池12通过每个所述供电元件161和每个所述受电元件251将电能补充至所述机载电池22。
53.更进一步地,在所述多旋翼无人机20降落到所述车辆主体10而使所述多旋翼无人机20处于所述固定状态时,所述多旋翼无人机20的所述机载摄像头23能够自所述车辆主体10的所述车载电池12取电。换言之,处于所述固定状态的所述多旋翼无人机20的所述机载电池22的电能不再供给所述机载摄像头23,如此:一方面,能够减少所述多旋翼无人机20的所述机载电池22的循环次数而延长所述机载电池22的使用寿命,另一方面,在所述多旋翼无人机20起飞而离开所述车辆主体10时,所述多旋翼无人机20的所述机载电池22能够被保证有充足的电能,例如所述多旋翼无人机20的所述机载电池22可以被保证满电而进一步保
证所述多旋翼无人机20的续航能力。
54.继续参考附图1至图5d,所述车辆主体10进一步包括一升降平台17,所述升降平台17被设置于所述车身11的后方,以用于升降所述多旋翼无人机20,并且在所述多旋翼无人机20降落至所述升降平台17后,所述升降平台17能够固持所述多旋翼无人机20的所述机身21,以将所述多旋翼无人机20和所述车辆主体10结合为一体。
55.具体地,所述升降平台17包括一平台主体171、两驱动电机172以及两固持臂173,每个所述驱动电机172分别被设置于所述平台主体171,每个所述固持臂173分别被可活动地设置于所述平台主体171和被可驱动地连接于每个所述驱动电机172,其中所述平台主体171被设置于所述车身11的后方,每个所述驱动电机172分别被电连接于所述车载电池12,其中当所述车载电池12向每个所述驱动电机172供电时,每个所述驱动电机172能够分别驱动每个所述固持臂173做相对于所述平台主体171的转动而固持所述多旋翼无人机20于所述平台主体171,从而由所述升降平台17将所述多旋翼无人机20和所述车辆主体10结合为一体,以在所述车辆行驶的过程中,避免降落后的所述多旋翼无人机20移位。更具体地,在所述多旋翼无人机20以所述机身21接触所述升降平台17的所述平台主体171的方式降落后,所述升降平台17的两个所述固持臂173能够被驱动而于所述机身21的相对两侧夹持所述机身21,如此可靠地固定所述多旋翼无人机20,以在所述车辆行驶的过程中,避免所述多旋翼无人机20移位。
56.进一步地,所述升降平台17包括至少一车载磁性元件174,所述车载磁性元件174被设置于所述平台主体171,并且所述车载磁性元件174位于两个所述固持臂173之间,相应地,所述多旋翼无人机20进一步包括至少一机载磁性元件26,其中在所述多旋翼无人机20降落的过程中,所述多旋翼无人机20的所述机载磁性元件26和所述车辆主体10的所述车载磁性元件174能够相互作用,以基于磁力允许所述多旋翼无人机20精准地降落。
57.换言之,所述多旋翼无人机20的所述机载磁性元件26和所述车辆主体10的所述车载磁性元件174能够相互作用引导所述多旋翼无人机20的降落位置以实现所述多旋翼无人机20的精准降落。
58.优选地,所述升降平台17的所述车载磁性元件174是电磁元件,所述车载磁性元件174被电连接于所述车载电池12,其中在所述车载电池12向所述车载磁性元件174供电时,所述车载磁性元件174能够产生磁场而配合所述机载磁性元件26引导所述多旋翼无人机20的降落位置,在所述多旋翼无人机20被固定于所述升降平台17后,所述车载电池12停止向所述车载磁性元件174供电,如此,一方面,能够减少电能消耗,另一方面,避免影像所述多旋翼无人机20起飞。
59.优选地,继续参考附图1至图5d,所述车辆主体10的所述供电单元16的两个所述供电元件161被相邻地设置于所述升降平台17的一个所述固持臂173,相应地,所述多旋翼无人机20的所述受电单元25的两个所述受电元件251被相邻地设置于所述机身21的一个侧部,其中当所述升降平台17的两个所述固持臂173于所述机身21的相对两个侧部夹持所述机身21而固定所述多旋翼无人机20时,被设置于所述固持臂173的两个所述供电元件161和被设置于所述机身21的两个所述受电元件251能够自动地接触并紧密地贴合,以实现所述车载电池12和所述机载电池22的电连接,如此所述车载电池12能够通过两个所述供电元件161和两个所述受电元件251将电能补充至所述机载电池22,和所述车载电池12能够通过两
个所述供电元件161和两个所述受电元件251将电能提供至所述机载摄像头23。
60.具体地,在本发明的所述车辆的一个较佳示例中,所述供电单元16的每个所述供电元件161是片状结构,即,所述供电元件161是一个供电片。所述受电单元25的每个所述受电元件251是点状结构,即,所述受电元件251是一个受电触点。如此,当所述升降平台17的两个所述固持臂173夹持所述多旋翼无人机20的所述机身21而使两个所述供电元件161和两个所述受电元件251紧密地贴合时,每个所述供电元件161和每个所述受电元件251能够被可靠地连接。
61.可选地,在本发明的所述车辆的另一个较佳示例中,所述供电单元16的每个所述供电单元161是点状结构,即,所述供电元件161是一个供电触点。所述受电单元25的每个所述受电元件251是片状结构,即,所述受电元件251是一个受电片。如此,当所述升降平台17的两个所述固持臂173夹持所述多旋翼无人机20的所述机身21而使两个所述供电元件161和两个所述受电元件251紧密地贴合时,每个所述供电元件161和每个所述受电元件251能够被可靠地连接。
62.优选地,所述供电单元16的每个所述供电元件161的面积分别大于所述受电单元25的每个所述受电元件251的面积,如此在所述多旋翼无人机20降落至所述升降平台17后,确保所述供电单元16的每个所述供电单元16和所述受电单元25的每个所述受电元件251可靠连接。也就是说,对于本发明的所述车辆而言,所述多旋翼无人机20存在合理的降落误差,为了确保降落后的所述多旋翼无人机20的所述受电单元25的每个所述受电元件251和所述车辆主体10的所述供电单元16的每个所述供电单元251可靠连接,所述供电单元16的每个所述供电元件161的面积被设计为分别大于所述受电单元25的每个所述受电元件251的面积。
63.优选地,继续参考附图1至图5d,所述车辆主体10的所述第一有线通信模块152的两个所述车载通信元件1521被相邻地设置于所述升降平台17的另一个所述固持臂173,相应地,所述多旋翼无人机20的所述第二有线通信模块242的两个所述机载通信元件2421被相邻地设置于所述机身21的另一个侧部,其中当所述升降平台17的两个所述固持臂173于所述机身21的相对两个侧部夹持所述机身21而固定所述多旋翼无人机20时,被设置于所述固持臂173的两个所述车载通信元件1521和被设置于所述机身21的两个所述机载通信元件2421能够自动地接触并紧密地贴合,以实现所述车辆主体10和所述多旋翼无人机20的有线通信连接,如此所述多旋翼无人机20的所述机载摄像头23拍摄的影像数据能够被传输至所述车辆主体10。
64.具体地,在本发明的所述车辆的一个较佳示例中,所述第一有线通信模块152的每个所述车载通信元件1521是片状结构,所述第二有线通信模块242的每个所述机载通信元件2421是点状结构,如此当所述升降平台17的两个所述固持臂173夹持所述多旋翼无人机20的所述机身21而使两个所述车载通信元件1521和两个所述机载通信元件2421紧密贴合时,每个所述车载通信元件1521和每个所述机载通信元件2421能够被可靠地连接。可选地,在本发明的所述车辆的另一个较佳示例中,所述第一有线通信模块152的每个所述车载通信元件1521是点状结构,所述第二有线通信模块242的每个所述机载通信元件2421是片状结构,如此当所述升降平台17的两个所述固持臂173夹持所述多旋翼无人机20的所述机身21而使两个所述车载通信元件1521和两个所述机载通信元件2421紧密贴合时,每个所述车
载通信元件1521和每个所述机载通信元件2421能够被可靠地连接。
65.优选地,所述第一有线通信模块152的每个所述车载通信元件1521的面积分别大于所述第二有线通信模块242的每个所述机载通信元件2421的面积,如此在所述多旋翼无人机20降落至所述升降平台17后,确保所述第一有线通信模块152的每个所述车载通信元件1521和所述第二有线通信模块242的每个所述机载通信元件2421可靠连接。也就是说,对于本发明的所述车辆而言,所述多旋翼无人机20存在合理的降落误差,为了确保降落后的所述多旋翼无人机20和所述车辆主体10的可靠通信连接,所述第一有线通信模块152的每个所述车载通信元件1521的面积被设计为分别大于所述第二有线通信模块242的每个所述机载通信元件2421的面积。
66.继续参考附图1至图5d,所述车辆主体10包括一升降仓18和一透镜单元19,其中所述升降仓18进一步包括一仓体181和一仓盖182,所述仓体181可以由所述车身11的后备箱盖通过凹陷的方式形成,以允许所述仓体181形成一仓体空间1811和连通于所述仓体空间1811的一升降开口1812,所述仓盖182被可活动地设置于所述仓体181,以用于闭合所述仓体181的所述升降开口1812,其中所述透镜单元19被设置于所述升降仓18的所述仓体181,以允许所述车身11外部的光线透过所述透镜单元19进入所述升降仓18的所述仓体181的所述仓体空间1811。所述升降平台17被设置于所述仓体181的所述仓体空间1811,如此降落至所述升降平台17的所述多旋翼无人机20被保持在所述仓体181的所述仓体空间1811,并且所述多旋翼无人机20被设置允许所述多旋翼无人机20的所述机载摄像头23对准所述透镜单元19,这样,外部光线在穿过所述透镜单元19后能够被所述机载摄像头23接收而拍摄所述车辆主体10的后方环境的影像。
67.优选地,所述仓盖182被可滑动地设置于所述仓体181,如此在所述车辆行驶的过程中,打开的所述仓盖182不会造成风阻,以降低噪音,并避免所述仓盖182受到风力的作用而损坏。
68.优选地,所述仓体181的所述升降开口1812形成于所述仓体181的后方,如此在所述车辆行驶的过程中,若所述仓盖182被打开而暴露所述仓体181的所述升降开口1812,风流能够被阻止经所述仓体181的所述升降开口1812进入所述仓体空间1811,从而有利于保证所述多旋翼无人机20顺利起飞。
69.附图4a至图4d示出了所述多旋翼无人机20的起飞过程。
70.参考附图4a,所述升降仓18的所述仓盖182被打开而暴露所述仓体181的所述升降开口1812。
71.参考附图4b,所述升降平台17的每个所述驱动电机172分别驱动每个所述固持臂173转动而释放所述多旋翼无人机20的所述机身21的相对两个侧部。
72.参考附图4c,所述多旋翼无人机20的所述机载电池22供电给所述多旋翼无人机20的飞行部件以允许所述多旋翼无人机20经所述仓体181的所述升降开口1812起飞而脱离所述车辆主体10。
73.参考附图4d,所述升降仓18的所述仓盖182被闭合而封闭所述仓体181的所述升降开口1812。起飞后的所述多旋翼无人机20通过所述多旋翼无人机20的所述第二无线通信模块241和所述车辆主体10的所述第一无线通信模块151通信地连接,以允许所述多旋翼无人机20的所述机载摄像头23拍摄的影像数据被传输至所述车辆主体10,后续,所述多旋翼无
人机20的所述机载摄像头23拍摄的影像能够被显示于所述车辆主体10的所述中控屏幕,以供驾驶所述车辆的驾驶员查看。
74.附图5a至图5d示出了所述多旋翼无人机20的降落过程。
75.参考附图5a,所述升降仓18的所述仓盖182被打开而暴露所述仓体181的所述升降开口1812。
76.参考附图5b,所述多旋翼无人机20的所述机载摄像头23拍摄所述仓体181的所述仓体空间1811的环境以识别所述升降平台17的位置,从而所述多旋翼无人机20能够悬浮于所述升降平台17的上方,所述多旋翼无人机20在下降的过程中,被设置于所述平台主体171的所述车载磁性元件174和被设置于所述机身21下方的所述机载磁性元件26能够相互作用以允许所述多旋翼无人机20精准地降落至所述平台主体171且位于两个所述固持臂173之间,此时所述多旋翼无人机20的所述机载摄像头23对准所述透镜单元19。
77.参考附图5c,所述升降平台17的每个所述驱动电机172分别驱动每个所述固持臂173转动而于所述多旋翼无人机20的所述机身21的相对两侧固持所述机身21于所述平台主体171,其中被设置于一个所述固持臂173的两个所述供电元件161和被设置于所述机身21的一个侧部的两个所述受电元件251被电连接,以允许所述车载电池12的电能被供应给所述机载电池22和允许所述车载电池12的电能被供应给所述机载摄像头23,其中被设置于另一个所述固持臂173的两个所述车载通信元件1521和被设置于所述机身21的另一个侧部的两个所述机载通信元件2421被可通信地连接,以允许所述多旋翼无人机20和所述车辆主体10有线连接。
78.参考附图5d,所述升降仓18的所述仓盖182被闭合而封闭所述仓体181的所述升降开口1812。
79.优选地,在附图5c示出的阶段,在所述多旋翼无人机20降落至所述升降平台17且两个所述固持臂173于所述多旋翼无人机20的所述机身21的相对两侧开始夹持所述机身21时,所述车辆主体10的所述第一无线通信模块151和所述多旋翼无人机20的所述第二无线通信模块241被保持无线通信连接,同时,所述车辆主体10的所述第一有线通信模块152和所述多旋翼无人机20的所述第二有线通信模块242被有线通信连接,在所述升降平台17最终固定所述多旋翼无人机20于所述升降平台17后,所述车辆主体10的所述第一无线通信模块151和所述多旋翼无人机20的所述第二无线通信模块241才被断开通信,而仅依靠所述车辆主体10的所述第一有线通信模块152和所述多旋翼无人机20的所述第二有线通信模块242通信连接来实现影像数据的传输,通过这样的方式,能够有效地避免所述多旋翼无人机20和所述车辆主体10之间的通信信号中断。
80.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
81.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1