一种基于多传感器的大型车辆盲区监测装置的制作方法
1.本实用新型涉及车辆盲区监测技术领域,尤其涉及一种基于多传感器的大型车辆盲区监测装置。
背景技术:
2.汽车盲区是指驾驶员位于正常驾驶座位置,其视线被车体遮挡而不能直接观察的区域。对于大型车辆而言,由于车辆普遍较长,驾驶员座位更高,盲区相对家用轿车更长,尤其是车辆的两侧、正后方以及车头下方,极易形成视野盲区及半盲区。对于进入盲区的车辆或行人,一旦驾驶员无法及时发现,则极易造成交通事故。
3.现有大型车辆针对上述盲区、半盲区采用超声波雷达与车辆环视的组合方法进行监测。但是上述超声波雷达测量范围有限,无法实现大范围测量,而车辆环视多用于车辆停靠过程且环视过程需要人为监控,因而上述测量方式效果有限且效率不高。
技术实现要素:
4.本实用新型所要解决的技术问题是克服现有技术中存在的不足,提供一种基于多传感器的大型车辆盲区监测装置。
5.本实用新型是通过以下技术方案予以实现:一种基于多传感器的大型车辆盲区监测装置,包括:
6.微处理单元;
7.图像采集单元,图像采集单元固定于车体的两侧并与微处理单元电性连接;
8.雷达监测单元,雷达监测单元包括固定于车体所属驾驶室前端的第一雷达、固定于车体尾部的第二雷达以及固定于驾驶室两侧的第三雷达及第四雷达,第一雷达、第二雷达、第三雷达以及第四雷达分别与微处理单元电性连接;
9.报警单元,报警单元与微处理单元电性连接。
10.进一步地,图像采集单元包括固定于车体所属后视镜的摄像头;
11.摄像头包括广角镜头以及与广角镜头电性连接的视觉传感器。
12.进一步地,摄像头与后视镜通过万向轴固定连接。
13.进一步地,还包括供电单元、总线接口单元以及至少两个数据转换单元;
14.其中供电单元、总线接口单元分别与微处理单元电性连接;
15.数据转换单元的输入端与图像采集单元和/或雷达监测单元电性连接,数据转换单元的输出端与微处理单元电性连接。
16.本实用新型的有益效果是:本技术所提供的一种基于多传感器的大型车辆盲区监测装置,调整并利用图像采集单元实时采集捕获视野盲区的图像信息,通过处理对盲区内的人体、车辆的位置、距离以及速度进行测算,并配合以雷达监测单元,在大型车辆进行启动、倒车、泊车、转弯或变道等动作时,通过报警单元对驾驶员进行提示,从而保证了测量的效果及效率。
附图说明
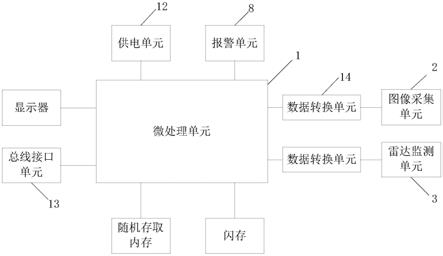
17.图1是本实用新型所提供的一种基于多传感器的大型车辆盲区监测装置的结构原理图。
18.图2是本实用新型所提供的一种基于多传感器的大型车辆盲区监测装置中雷达监测单元与车体的连接示意图。
19.图3是本实用新型所提供的一种基于多传感器的大型车辆盲区监测装置中摄像头与万向轴的连接示意图。
20.图中:1、微处理单元;2、图像采集单元;3、雷达监测单元;4、第一雷达;5、第二雷达;6、第三雷达;7、第四雷达;8、报警单元;9、摄像头;10、后视镜;11、万向轴;12、供电单元;13、总线接口单元;14、数据转换单元;15、随机存取内存;16、闪存。
具体实施方式
21.为了使本技术领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和最佳实施例对本实用新型作进一步的详细说明。
22.如图1、图2及图3所示,本实用新型提供了一种基于多传感器的大型车辆盲区监测装置,其特征在于,包括:
23.微处理单元1;上述微处理单元1具有图像处理识别能力,并通过与随机存取内存15(sdram,synchronous dynamic random
‑
access memory)以及闪存16(flash memory)存储对应的图像处理算法以及雷达处理算法。其中上述图像处理算法包括对获取图像进行白平衡、降噪、锐化、roi(选取感兴趣区域)、灰度变换、畸形矫正等处理,突出图像的色度和边缘特征。
24.具体的,图像处理算法对获取的图像进行图像选定,并在此基础上利用侦测算法对移动的目标图像进行跟踪,从而获取目标进行距离、速度以及位置信息。微处理单元1设置有距离和速度的安全阈值,当实际测量值大于安全阈值时,则认定车辆前行、倒车、入位、开关车门等动作是安全的。其中上述图像处理算法包括但不限于faster
‑
rcnn算法和yolo
‑
v3算法。
25.图像采集单元2,图像采集单元2固定于车体的两侧并与微处理单元1电性连接;上述图像采集单元2用以对车体两侧盲区进行图像捕获。上述图像通过显示器进行显示。
26.雷达监测单元3,雷达监测单元3包括固定于车体所属驾驶室前端的第一雷达4、固定于车体尾部的第二雷达5以及固定于驾驶室两侧的第三雷达6及第四雷达7,第一雷达4、第二雷达5、第三雷达6以及第四雷达7分别与微处理单元1电性连接;其中第一雷达4用以对驾驶室车头下方进行监测,第二雷达5用以监测车体后方盲区可能存在的行人及车辆。另外,第三雷达6以及第四雷达7用以监测驾驶室侧部下方可能存在的行人及车辆。并且上述第一雷达4、第二雷达5、第三雷达6以及第四雷达7包括但不限于采用毫米波雷达、激光雷达以及超声波雷达的一种或几种,通过与微处理单元1电性连接,实现对车体四周视觉盲区、半盲区进行监控。
27.报警单元8,报警单元8与微处理单元1电性连接。上述报警单元8优选采用声光报警器,用以通过声光两种信号向驾驶员提示行人及车辆。
28.本技术所提供的一种基于多传感器的大型车辆盲区监测装置,调整并利用图像采
集单元实时采集捕获视野盲区的图像信息,通过处理对盲区内的人体、车辆的位置、距离以及速度进行测算,并配合以雷达监测单元,在大型车辆进行启动、倒车、泊车、转弯或变道等动作时,通过报警单元8对驾驶员进行提示,从而保证了测量的效果及效率。
29.进一步地,图像采集单元2包括固定于车体所属后视镜10的摄像头9;
30.摄像头9包括广角镜头以及与广角镜头电性连接的视觉传感器。一种优选的实施方式中,上述视觉传感器采用星光级传感器,其作用在于当处于极低照度的环境下,能够捕获到宽视角、高质量视觉数据。同时为了尽量避免处于极低照度环境下进行图像采集,上述广角镜头底部集成有照明组件及感光元件,用以根据环境对照度进行补充。
31.进一步地,摄像头9与后视镜10通过万向轴11固定连接。上述万向轴11的一端固定于摄像头9,万向轴11的另一端固定于后视镜10,便于驾驶员调节摄像头9位置以获取更大的图像采集范围。
32.进一步地,上述大型车辆盲区监测装置还包括供电单元12、总线接口单元13以及至少两个数据转换单元14;
33.其中供电单元12、总线接口单元13分别与微处理单元1电性连接;微处理单元1通过总线接口与车辆控制总线连接,进而获取车辆方向盘及速度信息,并根据车辆方向盘的转向以及速度信息判定车辆低速启动、倒车、低速泊车、转向等动作,并启动上述车辆盲区监测装置,当测定盲区内有进入的车辆或行人时,通过触发报警单元8以提示驾驶员问题盲区。
34.数据转换单元14的输入端与图像采集单元2和/或雷达监测单元3电性连接,数据转换单元14的输出端与微处理单元1电性连接。图像采集单元2和/或雷达监测单元3所采集的图像信息及雷达信息通过数据转换单元14由模拟量转换为数字量,之后输入至微处理单元1进行后续操作。
35.本技术所提供的一种基于多传感器的大型车辆盲区监测装置,利用万向轴调节与后视镜连接的广角镜头进而获取更大范围的视觉盲区图像并利用视觉传感器进行成像,同时利用总线接口获取车辆总线控制信息,借以判断辆运动状态,当车辆转弯时触发视觉传感器及雷达所采集信息,微处理单元结合信息对盲区内的人体、车辆的位置、距离以及速度进行测算,当超过设定阈值时,微处理单元通过报警单元对驾驶员进行提示,从而保证了测量的效果及效率。
36.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1