用于检测在对象上特别是在转向盘上的手部触摸定位以进行手势识别的基于TDR的系统的制作方法
用于检测在对象上特别是在转向盘上的手部触摸定位以进行手势识别的基于tdr的系统
技术领域
1.本发明涉及一种识别由在对象上(特别是在转向盘(steering wheel)上)的手部触摸定位的序列建立的手势的方法、一种用于通过执行这种方法来检测在对象上(特别是在转向盘上)的手势的感测系统、一种包括这种感测系统的具有手势识别的转向盘、以及一种用于自动执行这种方法的软件模块。
背景技术:
2.在机动车辆传感器应用的领域中,已知将传感器用于所谓的不干涉检测(hands off detection,hod)系统,其中一个或多个传感器提供关于驾驶员是否将他的手放在车辆的转向盘上的信息。该信息可以作为输入提供给自动驾驶员辅助系统(adas)(例如,自适应巡航控制(acc)),该adas可以基于所提供的传感器信号来提示驾驶员并提醒他或她再次取得对转向盘的控制。特别地,这种hod系统可以用于支持满足vienna公约的要求,即,驾驶员必须始终保持对车辆的控制。hod系统也可以用于停车辅助系统或被配置用于评估在高速下的驾驶员活动的adas。
3.还已知在车辆hod系统中采用电容式传感器。
4.通过示例的方式,wo 2016/096815 a1提出了一种平面柔性载体(planar flexible carrier),其用于转向盘加热和/或感测驾驶员的手在转向盘上的存在。平面载体可以用于在没有褶皱的情况下安装在转向盘的轮缘(rim)上,包括具有两个纵向侧边和两个横向侧边的、大致为矩形的平面柔性箔的一部分。横向侧边的长度b是轮缘的周长的0.96至1.00倍。每单位长度的n个切口(cut-out)被设置在纵向侧边中的每一个纵向侧边上,其中一个侧边的切口相对于相对侧边上的相对切口部分以交错方式定位。描述了对切口的最佳形状和大小的确定。进一步描述了热载体、加热和/或感测设备以及用于热载体、加热和/或感测设备的生产的方法。
5.多区域hod电容式传感器系统在本领域中是已知的,其包括沿着转向盘的多个不同且独立的感测区域。这些hod电容式传感器系统能够区分驾驶员握住车辆转向盘的各种方式(一只手、两只手、角度位置)。
6.例如,欧洲专利ep 1292485 b1描述了一种车辆的转向盘,其包括转向环、轮毂(hub)以及连接转向环和轮毂的至少一个辐条(spoke)。在转向环上,传感器沿着转向环的圆周以分布方式布置,从而在转向环的整个长度上延伸。传感器可以被配置用于在电阻、电容或电感的基础上操作。传感器被细分为多个段,这些段在转向环的纵向方向上一个接一个地布置。传感器的两个段在转向环的纵向方向上彼此之间的间隔小于手指宽度,其中传感器的段在转向环的纵向方向上小于手指宽度。由此,可以可靠地区分手的拇指和手指,并且实现高空间分辨率。
7.利用这种电容式hod系统,仅可能基于专用传感器区域来检测触摸定位或抓握手部定位。位置检测只能基于传感器区域大小。
8.其他传感器的使用也已经被提议用于hod应用。wo 2019/086388 a1描述了一种用于检测用户的至少一只手是否在转向盘上的系统。该系统通常基于时域反射计(tdr)测量。该系统包括从第一点延伸到第二点并且沿着转向盘的表面的至少一部分设置的信号线。该系统还包括耦合到第一点的检测单元。该检测单元被配置为发送沿着信号线行进的取决于时间的检测信号,以接收沿着信号线行进的反射的信号,并基于反射的信号检测表面上手的存在。
技术实现要素:
9.发明目的
10.本发明的目的是提供一种低复杂度的感测系统,该感测系统可以用于至少检测在对象上特别是在转向盘(特别是车辆的转向盘)上的手部触摸定位,以用于识别由在对象上特别是在转向盘上的手部触摸定位的序列建立的手势。
11.该目的是通过以下各项实现的:根据权利要求1的一种识别由在对象上特别是在转向盘上的手部触摸定位的序列建立的手势的方法,根据权利要求5的一种用于检测这种手势的感测系统,以及根据权利要求6的一种具有手势识别的转向盘。
12.发明概述
13.在本发明的一个方面,通过以下来实现该目的:一种通过操作感测系统来识别手势的方法,该手势是由在对象上特别是在转向盘上的手部触摸定位的序列建立的。感测系统包括:至少一条导电信号线,利用关于至少一条信号线的任何部分距参考点的距离与关于在对象上的位置的信息之间的关系的先验知识,该至少一条导电信号线被布置为沿着对象的表面的一部分延伸;信号电压源,其可操作地连接到每条信号线;以及控制和评估单元,其可操作地连接到每条信号线。
14.该方法至少包括以下步骤:
[0015]-通过操作信号电压源,向信号线提供旨在沿着相应的连接的信号线行进的取决于时间的测量信号,
[0016]-操作控制和评估单元,以接收在由已经向其提供了测量信号的信号线的至少一部分至少部分地反射之后的测量信号,
[0017]-操作控制和评估单元,以确定信号线的一个或多个部分在对象上的一个或多个位置,该信号线的一个或多个部分已经至少部分地反射测量信号,
[0018]-存储在对象上的确定的一个或多个位置,
[0019]-重复前述步骤预定次数,以获得在对象上的多个存储的连续确定的位置,
[0020]-将在对象上的获得的多个存储的连续确定的位置与连续位置的至少一个预先定义模式进行比较,以导出相似性的度量(measure),以及
[0021]-如果导出的相似性的度量低于预先定义的阈值,则提供指示连续位置的预先定义模式的输出信号。
[0022]
如贯穿本技术所使用的术语“信号”应被理解为表示电信号或电磁信号。如在本技术中使用的术语“(电)连接”应特别理解为通过电流连接或电容式耦合或电感式耦合进行电连接。
[0023]
通常,根据本发明的用于手部定位检测的感测系统是基于时域反射计(tdr)的,并
且所提供的旨在沿着相应的连接的信号线行进的取决于时间的测量信号适用于tdr测量。取决于时间的测量信号的信号形状可能取决于具体应用。
[0024]
所提供的取决于时间的测量信号将沿着相应的连接的信号线行进,并且将至少部分地从沿着信号线的任何阻抗不连续性(impedance discontinuity)反射。这种阻抗不连续性可以由被定位在信号线附近的对象(特别是转向盘)的操作者的手或手的一个或多个手指临时生成。所生成的一个或多个阻抗不连续性的性质由在对象上(特别是在转向盘上)的手部定位的性质确定。
[0025]
利用关于至少一条信号线的任何部分距参考点的距离与关于在对象上的位置的信息之间的关系的先验知识,使得所提出的感测系统能够确定在对象上的检测到的阻抗不连续性的位置。该信息可以用于确定在对象上的手部定位场景,例如,手部触摸定位。
[0026]
所提出的方法可以允许使用时域反射计(tdr)的原理对手部触摸定位的序列进行高分辨率位置检测。通过将多个连续确定的位置与至少一个预先定义模式进行比较,可以实现对手势的识别,该手势是由在对象上的手部触摸定位的序列建立的。
[0027]
要由所提出的方法识别的手势可以被指派给多个不同的附加功能,例如,诸如多媒体功能之类的舒适功能(comfort function)。建立手势的手部触摸定位的序列可以由对象的操作者的一只手或两只手执行。手部触摸定位可以包括但不限于利用一只手或两只手的单触定位(single-touch positioning)、利用一只手或两只手的多触定位(multiple touch positioning)以及利用一只手或两只手的手部抓握定位。
[0028]
优选地,比较的步骤包括:将获得的多个存储的连续确定的位置与连续位置的多个预先定义模式进行比较,以针对多个预先定义模式中的每个预先定义模式导出相似性的度量。以这种方式,可以以可靠的方式区分和识别由在对象上的手部触摸定位的不同序列建立的多个手势。
[0029]
优选地,可以通过在感测系统中的参数设置来启用或禁用所提出的方法的步骤的执行。以这种方式,可以在具有或不具有手势识别的功能的情况下使用相同设计的感测系统。优选地,感测系统中的参数设置被设计作为在控制和评估单元内的软件参数设置。
[0030]
在该方法的优选实施例中,重复前述步骤的步骤包括重复步骤预定次数,该预定次数对应于在0.5秒到1.5秒之间的时间段。以这种方式,可以实现用于手势的识别的高可靠性。此外,该方法可以允许在所描述的时间段内识别由对象(特别是转向盘)的操作者或用户执行的复杂手势。
[0031]
优选地,对象由转向盘的轮缘形成,并且连续位置的至少一个预先定义模式包括关于转向盘的轮缘的圆周方向的转折点。以这种方式,可以可靠地检测由包括来回擦拭的手部触摸定位建立的手势。
[0032]
在本发明的另一方面,提供了一种用于检测手势的感测系统,该手势是由在对象特别是转向盘的轮缘上的手部触摸定位的序列建立的。
[0033]
该感测系统包括至少一条导电信号线、信号电压源以及控制和评估单元。
[0034]
利用关于至少一条信号线的任何部分距参考点的距离与关于在对象上的位置的信息之间的关系的先验知识,该至少一条导电信号线可被布置为沿着对象特别是转向盘的轮缘的表面的一部分延伸。
[0035]
信号电压源可操作地连接到每条信号线,并且被配置用于提供要沿着相应的连接
的信号线行进的取决于时间的测量信号。
[0036]
控制和评估单元可操作地连接到每条信号线,并且被配置用于:
[0037]-接收在由已经向其提供了测量信号的信号线的至少一部分至少部分地反射之后的测量信号,
[0038]-确定信号线的一个或多个部分在对象上的一个或多个位置,该信号线的一个或多个部分已经至少部分地反射测量信号,
[0039]-存储在对象上的确定的一个或多个位置,
[0040]-重复前述步骤预定次数,以获得在对象上的多个存储的连续确定的位置,
[0041]-将在对象上的获得的多个存储的连续确定的位置与连续位置的至少一个预先定义模式进行比较,以导出相似性的度量,以及
[0042]-如果导出的相似性的度量低于预先定义的阈值,则提供指示连续位置的预先定义模式的输出信号。
[0043]
如在本技术中使用的短语“被配置为”应特别理解为被具体地编程、安排、装备或布置。
[0044]
所提出的用于在对象上(特别是在转向盘上)进行手部定位检测的感测系统可以具有低复杂度并且能够区分各种手势,这些手势中的每一个手势都由在对象上的手部触摸定位的序列建立。
[0045]
取决于时间的测量信号可以是脉冲信号,如在tdr中经常使用的,但也可以是连续信号。在感测系统的优选实施例中,信号电压源被配置用于提供脉冲整形信号、频率扫描信号、伪随机相移键控信号或伪随机信号。这可以为适当覆盖广泛的应用提供设计自由度。
[0046]
在频率扫描正弦波的情况下,控制和评估单元可以被配置为将快速傅里叶变换(fft)应用于接收到的反射的测量信号。在伪随机相移键控信号或伪随机信号的情况下,控制和评估单元可以被配置为在所提供的测量信号与接收到的反射的测量信号之间应用互相关。
[0047]
优选地,所提出的感测系统形成机动车辆的转向盘的一部分,并且对象由转向盘的轮缘形成。在本专利申请中使用的术语“机动车辆”应特别理解为涵盖客车、卡车、半挂卡车和公共汽车,但是在本发明的范围内也设想应用于其他交通工具,例如,飞机或船只。
[0048]
在本发明的又一方面,提供了一种具有通过手部触摸定位检测进行的手势识别的转向盘。该转向盘包括如本文公开的感测系统的实施例,其中,至少一条导电信号线被布置为沿着转向盘的轮缘的表面的一部分延伸。在根据本发明的感测系统的上下文中描述的益处完全适用于所提出的转向盘。
[0049]
特别地,所提出的转向盘可有利地适用于汽车行业;即,用于车辆。然而,在本发明的范围内,还设想将所提出的转向盘用于飞机和海上航行器。
[0050]
在优选实施例中,转向盘还包括转向盘的轮缘的至少一个连续部分,该至少一个连续部分可由外部标记识别(即,对转向盘的操作者可识别),其中,至少一条信号线的一个或多个部分被布置在轮缘的可针对手势识别专用的至少一个连续部分上,并且其中,至少一个连续部分限定测量信号沿着信号线的一个或多个行进时间间隔。以这种方式,可以通过关注由轮缘的至少一个连续部分的位置限定的测量信号的一个或多个行进时间间隔来减少检测手部触摸定位以进行手势识别的工作。
[0051]
此外,操作者可以以人机接口(hmi)的方式在该处提供输入(例如,用于选择或调整诸如多媒体功能之类的舒适功能)的在转向盘的轮缘上的位置是明确限定的并且易于识别。
[0052]
优选地,至少一条信号线的一个或多个部分针对手势识别的专用和限定的一个或多个行进时间间隔是可切换的。以这种方式,可以在具有或不具有手势识别的功能的情况下使用相同设计的信号线,这可以简化转向盘的组装过程。
[0053]
在转向盘的优选实施例中,专用可通过控制和评估单元中的参数设置来切换。由此,可以使得能够在安装转向盘之后或甚至作为改装的一部分(例如,升级,无需任何硬件更改)并入专用。
[0054]
优选地,感测系统中的参数设置被设计作为在控制和评估单元内的软件参数设置,由此可以随时容易地执行针对手势识别的专用。
[0055]
在转向盘的优选实施例中,被布置在转向盘的轮缘的至少一个连续部分上的至少一条信号线的一个或多个部分在一个时间点选择性地可用于手势识别,并且在另一时间点选择性地可用作要用于本文所公开的感测系统的实施例的基于时域反射计的测量的至少一条信号线的一部分,该感测系统要用于转向盘上的手部定位检测。
[0056]
换言之,至少一条信号线可以作为整体与适当的感测系统一起使用,该感测系统在一个时间用于手部定位检测(即,触摸定位或抓握手部定位);并且该至少一条信号线可以在另一时间与至少一条信号线的一个或多个部分一起使用,该一个或多个部分被布置在轮缘的针对手势识别专用的至少一个连续部分上。以这种方式,感测系统和至少一条信号线可以实质上同时用于提供不干涉检测的安全功能并且用于提供附加功能,例如,诸如多媒体功能之类的舒适功能。
[0057]
在本发明的又一方面,提供了一种用于控制本文所公开的方法的实施例的步骤的自动执行的软件模块。
[0058]
要执行的方法步骤被转换为软件模块的程序代码,其中,程序代码可在本文公开的感测系统的数字存储器单元中实现,并且可由本文公开的感测系统的处理器单元执行。优选地,数字存储器单元和/或处理器单元可以是感测系统的控制和评估单元的数字存储器单元和/或处理单元。处理器单元可以可替代地或补充地是另一处理器单元,该另一处理器单元被特别指派为执行方法步骤中的至少一些。
[0059]
软件模块可以实现该方法的鲁棒且可靠的执行,并且可以允许快速修改方法步骤。
[0060]
本发明的这些和其他方面将从下文描述的实施例中变得明显并且参考下文描述的实施例来阐明。
[0061]
应当指出,在前述描述中单独详述的特征和措施可以以任何技术上有意义的方式彼此组合并且示出本发明的进一步实施例。说明书尤其结合附图表征并详细说明了本发明。
附图说明
[0062]
本发明的进一步细节和优点将从以下参照附图对非限制性实施例的详细描述中变得显而易见,其中:
[0063]
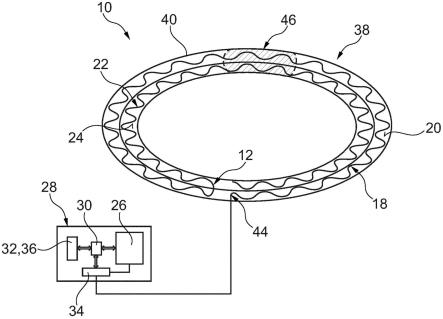
图1示意性地示出了根据本发明的感测系统,用于在安装状态下检测在由转向盘的轮缘形成的对象上的手部触摸定位的序列建立的手势,
[0064]
图2示意性地示出了根据图1的感测系统的导电信号线,
[0065]
图3示意性地示出了在手执行手势的场景中的根据图1的感测系统,该手势是由在转向盘上的手部触摸定位的序列建立的,以及
[0066]
图4是通过操作根据图1的感测系统来识别手势的方法的流程图,该手势是由在转向盘上的手部触摸定位的序列建立的。
[0067]
在不同的附图中,相同的部件总是分别被提供有相同的附图标记或数字。因此,它们通常只被描述一次。
具体实施方式
[0068]
图1示意性地示出了根据本发明的感测系统,用于在安装状态下检测手势,该手势是在由转向盘(更具体地,由转向盘的轮缘)形成的对象上的手部触摸定位的序列建立的。为清楚起见,仅示出了转向盘38的轮缘40或转向环,其还包括至少一个辐条,该辐条以本身已知的方式经由轮毂将轮缘40连接到转向柱(steering column)。转向盘38可以用在被设计为客车的车辆中,但也可以用在飞机或船只中。
[0069]
感测系统10包括导电信号线12、信号电压源26以及控制和评估单元28。
[0070]
感测系统10的信号线12示意性地示于图2中。信号线12可以成形为曲折图案,其包括由直线部分连接的多个半圆形匝。信号线12可以被设计作为具有导电中心线和两条导电返回线的共面波导,其中,两条导电返回线以等间距的方式被布置在中心线的两侧。中心线和返回线可以例如通过应用丝网印刷方法附接到诸如聚合物箔之类的柔性电介质载体14。以这种方式,信号线12被设计为具有预先定义的均匀特性阻抗,其可以通过改变中心线和返回线的几何形状和相对位置来布置,如本领域公知的。
[0071]
柔性电介质载体14可以由用作共面波导的附加返回线的导电接地平面支持。
[0072]
信号线12可以是端口开放的,如图2中示出的,但该信号线12也可以由等于特性阻抗的集总阻抗终止,以避免在其端部的反射。在端口开放的情况下,预计会出现全反射,其可以用作时间参考标记。
[0073]
在信号线12的曲折图案的相邻转折点16之间的最大维度适合于转向盘38的轮缘40的横截面的圆周长度,使得在曲折图案的相邻转折点16之间的最大横向维度是转向盘38的轮缘40的横截面的圆周长度的大于25%且小于50%,并且在该特定实施例中可以是圆周长度的大约30%。
[0074]
如图1中示出的,导电信号线12被布置为沿着转向盘38的轮缘40的表面的一部分延伸。信号线12包括第一部分18,该第一部分18被布置为沿着转向盘38的轮缘40的面向转向盘38的操作者(即,通常是车辆的驾驶员)的表面20的一部分延伸。信号线12还包括第二部分22,该第二部分22被布置为沿着转向盘38的轮缘40的背离转向盘38的操作者的表面24的一部分延伸。信号线12的第一部分18和第二部分22串联电连接而没有阻抗不连续性。
[0075]
利用关于信号线12的任何部分距参考点44的距离与关于在轮缘40上的位置的信息之间的关系的先验知识,信号线12被安装并布置在转向盘38的轮缘40的表面上。可以选择信号线12的任一点作为参考点。在本具体实施例中,参考点44被选择为位于信号线12的
输入端处。信号线12的任何部分在轮缘40上的位置可以通过指定表面(即,面向操作者的表面20或背离操作者的表面24)以及通过指定相对于零角位置的中心角来进行限定。
[0076]
转向盘38还包括轮缘40的连续部分46,其可由外部标记向转向盘操作者识别。信号线12的一部分被布置在轮缘40的可针对手势识别专用的连续部分46上。连续部分46限定了测量信号相对于参考点44沿着信号线12的行进时间间隔。
[0077]
信号电压源26可操作地连接到信号线12,并被配置用于提供要沿着连接的信号线12行进的取决于时间的测量信号。在该实施例中,信号电压源26被设计作为控制和评估单元28的组成部分,从而共享同一壳体以改进控制和评估单元28的信号处理和控制。在其他实施例中,信号电压源26可以被设计作为具有到信号线12以及控制和评估单元28的适当信号和控制线的单独单元。
[0078]
在该特定实施例中,信号电压源26被设计用于提供脉冲整形信号,但在其他实施例中,信号电压源可以被配置用于提供频率扫描信号、伪随机相移键控信号或伪随机信号。
[0079]
控制和评估单元28可操作地连接到信号线12以及信号电压源26。控制和评估单元28可以包括微控制器,该微控制器包括数字数据存储器单元32、对数字数据存储器单元32进行数据访问的处理器单元30、以及控制接口34。如下文将解释的,控制和评估单元28被配置用于自动执行识别手势的方法,该手势是由在转向盘38上的手部触摸定位的序列建立的。
[0080]
信号线12的被布置在轮缘40的连续部分46上的部分可通过控制和评估单元28中的软件参数设置针对手势识别专用。通过设置适当的软件参数,由轮缘40的连续部分46限定的测量信号相对于参考点44沿着信号线12的行进时间间隔将由控制和评估单元28指派给手势识别。
[0081]
即,信号线12的被布置在转向盘38的轮缘40的连续部分46上的部分在一个时间点选择性地可用于手势识别,并且在另一时间点选择性地可用作要用于感测系统10的基于时域反射计的测量的信号线12的部分,该感测系统10要用于转向盘上的手部定位检测以实现hod目的,并且该感测系统10特别地用于区分触摸定位和手部抓握定位。由于感测系统10的操作速度,这对于转向盘操作者来说是不明显的。
[0082]
如果没有适当地设置软件参数,则信号线12的被布置在转向盘38的轮缘40的连续部分46上的部分将始终用于感测系统的基于时域反射计的测量,该感测系统要用于转向盘38上的手部定位检测以实现hod目的。因此,可以使用相同的感测系统硬件来实现这两个目的。
[0083]
在下文中,将参考图1和图3以及图4描述通过操作根据图1的感测系统10来识别在由转向盘38(更具体地,由转向盘38的轮缘40)形成的对象上的手部触摸定位的序列建立的手势的方法的实施例,其中图3示意性地示出了在手执行由在转向盘上的手部触摸定位的序列建立的手势的场景中的根据图1的感测系统,图4提供了方法的流程图。在准备操作感测系统10时,应当理解,所有涉及的单元和设备都处于操作状态并且如图1所示配置。
[0084]
为了能够自动执行该方法,控制和评估单元28包括软件模块36。要执行的方法步骤被转换为软件模块36的程序代码。程序代码在控制和评估单元28的数字数据存储器单元32中实现,并且可由控制和评估单元28的处理器单元30执行。可替代地,软件模块36也可以驻留在车辆的另一控制单元并且可由该另一控制单元执行,并且在控制和评估单元28与车
辆控制单元之间建立的数据通信单元将用于实现相互数据传输。
[0085]
该方法的执行可以通过控制和评估单元28中的软件参数的适当设置来启用或禁用。
[0086]
在该方法的第一步骤50中,通过操作信号电压源26,取决于时间的测量信号被提供给信号线12。测量信号旨在沿着连接的信号线12行进。在转向盘38上没有任何手部定位并且信号线12以集总阻抗终止的情况下,预期完全没有反射。取决于时间的测量信号的提供可以由控制和评估单元28控制。在其他实施例中,取决于时间的测量信号的提供可以用作控制和评估单元28开始执行后续步骤的触发信号。
[0087]
在该方法的另一步骤52中,控制和评估单元28被操作用于接收在由信号线12的至少一部分至少部分地反射之后的测量信号(也称为接收到的反射的测量信号)。
[0088]
在下一步骤54中,控制和评估单元28被操作以确定信号线12的已经至少部分地反射测量信号的部分在轮缘40上的位置。这是通过使用关于信号线12的任何部分距参考点44的距离(图2)与关于在轮缘40上的位置的信息(图3)之间的关系的先验知识来获得的。
[0089]
由于在控制和评估单元28中的软件参数设置,与位于由轮缘40的连续部分46限定的行进时间间隔内的测量信号的行进时间相对应的在轮缘40上的确定的位置由控制和评估单元28认为是由在转向盘40上的手部触摸定位生成的,该手部触摸定位是建立手势的手部触摸定位的序列的一部分。
[0090]
在该方法的进一步步骤56中,将在轮缘40的连续部分46上的确定的位置存储在数字数据存储器单元32中。
[0091]
向信号线12提供测量信号、接收在反射之后的测量信号、确定信号线12的反射测量信号的部分的位置以及存储确定的位置的所描述的步骤50-56重复预定次数。该预定次数对应于可以在0.5秒到1.5秒之间的时间段,并且在本具体实施例中,该预定次数可以被选择为1.0秒。在此期间,转向盘操作者可以执行手势,该手势可以包括在轮缘40的连续部分46上来回擦拭的手势。
[0092]
因此,获得了在轮缘40上的多个存储的连续确定的位置。在另一步骤58中,从数字数据存储单元32中取回多个存储的确定的位置。在下一步骤60中,将多个存储的确定的位置与连续位置的预先定义模式进行比较,以导出相似性的度量。连续位置的预先定义模式包括关于轮缘40的圆周方向的转折点。
[0093]
在另一步骤62中,将导出的相似性的度量与预先定义的阈值thr进行比较。如果导出的相似性的度量低于预先定义的阈值thr,则在另一步骤64中,由控制和评估单元28提供输出信号,该输出信号指示连续位置的预先定义模式,其进而代表特定手势。如果导出的相似性的度量等于或大于预先定义的阈值thr,则将多个存储的确定的位置与连续位置的另一预先定义模式进行比较,以导出另一相似性的度量。这被重复直到导出的相似性的度量低于针对连续位置的预先定义模式中的一个的预先定义的阈值thr,或者直到多个存储的连续确定的位置未能与连续位置的预先定义模式中的任一个匹配。
[0094]
虽然本发明已经在附图和前述描述中详细说明和描述,但是这样的说明和描述应被认为是说明性的或示例性的而不是限制性的;本发明不限于所公开的实施例。
[0095]
本领域技术人员在实践要求保护的发明时,通过研究附图、公开内容和所附权利要求,可以理解和实现要公开的实施例的其他变型。在权利要求中,词语“包括”不排除其他
元素或步骤,并且不定冠词“一(a)”或“一个(an)”不排除意在表示至少两个的数量的多个。在相互不同的从属权利要求中引述了某些措施这一事实并不表明不能有利地使用这些措施的组合。权利要求中的任何附图标记不应被解释为限制范围。
[0096]
附图标记列表
[0097]
10
ꢀꢀꢀꢀꢀ
感测系统
[0098]
12
ꢀꢀꢀꢀꢀ
信号线
[0099]
14
ꢀꢀꢀꢀꢀ
柔性电介质载体
[0100]
16
ꢀꢀꢀꢀꢀ
转折点
[0101]
18
ꢀꢀꢀꢀꢀ
第一部分
[0102]
20
ꢀꢀꢀꢀꢀ
表面
[0103]
22
ꢀꢀꢀꢀꢀ
第二部分
[0104]
24
ꢀꢀꢀꢀꢀ
表面
[0105]
26
ꢀꢀꢀꢀꢀ
信号电压源
[0106]
28
ꢀꢀꢀꢀꢀ
控制和评估单元
[0107]
30
ꢀꢀꢀꢀꢀ
处理器单元
[0108]
32
ꢀꢀꢀꢀꢀ
数字数据存储器单元
[0109]
34
ꢀꢀꢀꢀꢀ
控制接口
[0110]
36
ꢀꢀꢀꢀꢀ
软件模块
[0111]
38
ꢀꢀꢀꢀꢀ
转向盘
[0112]
40
ꢀꢀꢀꢀꢀ
轮缘
[0113]
42
ꢀꢀꢀꢀꢀ
手
[0114]
44
ꢀꢀꢀꢀꢀ
参考点
[0115]
46
ꢀꢀꢀꢀꢀ
连续部分
[0116]
thr
ꢀꢀꢀꢀ
预先定义的阈值
[0117]
步骤:
[0118]
50
ꢀꢀꢀꢀꢀ
向信号线提供测量信号
[0119]
52
ꢀꢀꢀꢀꢀ
接收反射的测量信号
[0120]
54
ꢀꢀꢀꢀꢀ
确定信号线的反射测量信号的部分在轮缘上的位置
[0121]
56
ꢀꢀꢀꢀꢀ
在数字数据存储单元中存储在轮缘上的确定的位置
[0122]
58
ꢀꢀꢀꢀꢀ
从数字数据存储单元取回存储的在轮缘上的确定的位置
[0123]
60
ꢀꢀꢀꢀꢀ
通过与连续位置的预先定义模式进行比较来导出相似性的度量
[0124]
62
ꢀꢀꢀꢀꢀ
将相似性的度量与预先定义的阈值进行比较
[0125]
64
ꢀꢀꢀꢀꢀ
提供指示预先定义模式的输出信号
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1