一种偏心镜头在CMS系统中的应用方法与流程
一种偏心镜头在cms系统中的应用方法
技术领域
1.本发明涉及车载影像技术领域,具体为一种偏心镜头在cms系统中的应用方法。
背景技术:
2.cms从用途来讲就是汽车上用来替代传统后视镜的间接视野装置。随着智能网联,自动驾驶,adas等新技术的出现,汽车正在向电子化、智能化方向飞速发展,汽车后视镜也同样在发展,未来后视镜将允许被替代,摄像机加监视器的组合将用来解决后视野问题。利用摄像机监视器系统(cms)替代标准强制规定安装的后视镜有助于降低车辆的空气阻力,减小视野盲区,提高恶劣环境下的视野表现。同时替代后视镜的摄像头可以集成adas及智能网联相关功能,并在车内的适当显示器上实时显示视觉信息。cms包括一个摄像头(camera),用于捕捉视野,并向电子控制单元(ecu)发送信号以进一步处理,然后利用显示器(monitor)为驾驶员提供视野。
3.偏心摄像头作为一种新兴技术,主要是用于为驾驶员提供更优秀的视野,相较于传统摄像头,其有效视场角率更高,但是现有的偏心摄像头的应用还不够成熟,因此对于偏心摄像头的应用还有必要进一步研究。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种偏心镜头在cms系统中的应用方法,解决了现有的偏心摄像头应用不够成熟的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种偏心镜头在cms系统中的应用方法,包括以下步骤:
6.设置若干输入端以及若干个输出端,若干所述输入端均为摄像头,若干所述输出端均为显示器;
7.根据显示器的型号和相关文件得到显示器的显示尺寸,并通过用眼点到屏幕的距离以及屏幕的尺寸,得出视线与显示器之间的夹角为θ;
8.通过计算得出满足最小放大倍数的摄像头最大显示视场角为fov(vfov,hfov);
9.通过fov结合显示器分辨率和相机参数,设置图像尺寸到显示器显示放大率为resize;
10.通过所述resize计算出屏幕的感兴趣区域为roi,并利用roi计算出虚拟焦距f;
11.通过所述虚拟焦距f计算出摄像头拍摄视场角的取值范围fov,并从中取值hfov,vfov。
12.优选的,建立一个偏心率与有效视角的公式;
13.计算出偏心率;
14.根据偏心率放置传感器、光学镜头,制作出适配的偏心摄像头。
15.优选的,还包括以下步骤:
16.设置好偏心率,并设置镜头角度fov'(hfov',vfov');
17.通过设置的偏心率以及偏心率与有效视角的公式计算出像圆直径;
18.根据得到的像圆直径计算出图像到显示器的显示放大率resize';
19.通过resize'计算出摄像头的视场角为fov'(vfov',hfov')。
20.优选的,视场角利用率公式为:
[0021][0022]
fov
×
p=fov;
[0023]
其中p为显示视角于原视角比值,fov为总视角或者原视角,α是显示器在人眼的视野角度;
[0024]
所述显示器和眼点之间的夹角范围为:
[0025]
0<θ≤90,0<α≤90;
[0026]
所述α的计算公式为:
[0027][0028][0029]
其中,m
aw
为屏幕宽度,s
el
为眼睛到左侧显示器的距离,s
er
为眼睛到右侧显示器的距离。
[0030]
优选的,计算显示视场角的公式为:
[0031][0032]
其中,m
aw
为显示器的宽度,m
as
为眼睛到显示器的距离,m
i1
为放大倍数要求,i代表了法规法条中的第i个区域。
[0033]
优选的,所述roi的计算公式为:
[0034][0035][0036][0037][0038]
其中,resizel,resizer是用户设置的最大允许resize率,mw是屏幕横向分辨率,mh是屏幕纵向分辨率;
[0039]
计算所述虚拟焦距f的公式为:
[0040]
[0041]
计算所述fov的公式为:
[0042][0043]
优选的,图像显示放大率的计算公式为:
[0044][0045][0046]
其中mw为显示器分辨率,f为虚拟焦距,hfov
l
为用户设置左侧的hfov,hfovr为用户设置右侧的hfov。
[0047]
优选的,有效视角的计算公式为:
[0048][0049]
向上有效
[0050]
向下有效
[0051]
其中,s
r2
为sensor分辨率,xe为x轴偏心量,f
min
为最小虚拟焦距,s
r3
为sensor分辨率,ye为y轴偏心量;
[0052]
hfov"=f(hfov)=k1*hfov+k2*hfov3+k3*hfov5+k4*hfov7+k5*hfov9;
[0053]
其中,hfov"为畸变校正后的角度,f()为计算畸变校正后角度的函数,k1、k2、k3、k4、k5为畸变系数。
[0054]
优选的,最小像圆直径的公式为:
[0055]
r=sqrt(sw×
(xe+0.5)
×
sw×
(xe+0.5)+sh×
(ye+0.5)
×
sh×
(ye+0.5))
×
2;
[0056]
其中,r为最小像圆直径,sw为sensor的宽度,xe为x轴偏心量,sh为sensor高度,ye为y轴偏心量。
[0057]
优选的,若干所述输入端的数量为三个,三个所述输入端分别为左摄像头,右摄像头以及后摄像头,若干所述输出端的数量为三个,所述所述输出端分别为左显示器、右显示器以及中显示器。
[0058]
有益效果
[0059]
本发明提供了一种偏心镜头在cms系统中的应用方法。具备以下有益效果:该偏心镜头在cms系统中的应用方法,本案中的s1-s6加上q1-q3的步骤是偏心摄像头选择和定位的方法,而l1-l4的步骤则为定位法的逆运用,先通过眼点的位置得到观察视线与左右显示器的夹角,α1,α2。
附图说明
[0060]
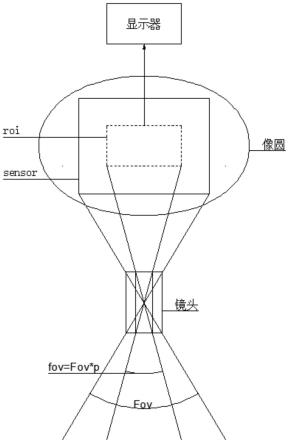
图1为本发明的成像示意图。
[0061]
图2为本发明的眼点与屏幕的三维位置示意图。
具体实施方式
[0062]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0063]
请参阅图1-2,本发明提供一种技术方案:一种偏心镜头在cms系统中的应用方法,包括以下步骤:
[0064]
s1.设置若干输入端以及若干个输出端,若干所述输入端均为摄像头,若干所述输出端均为显示器;
[0065]
s2.根据显示器的型号和相关文件得到显示器的显示尺寸,并通过用眼点到屏幕的距离以及屏幕的尺寸,得出视线与显示器之间的夹角为θ;
[0066]
s3.通过计算得出满足最小放大倍数的摄像头最大显示视场角为fov(vfov,hfov);
[0067]
s4.通过fov结合显示器分辨率和相机参数,设置图像尺寸到显示器显示放大率为resize;
[0068]
具体的,根据得到的resize还可以用户设定一个最大允许的放大率,根据这个放大率计算除镜头最大的视场角fov;
[0069]
s5.通过所述resize计算出屏幕的感兴趣区域为roi,并利用roi计算出虚拟焦距f;
[0070]
s6.通过所述虚拟焦距f计算出摄像头拍摄视场角的取值范围fov,并从中取值hfov,vfov;
[0071]
q1.建立一个偏心率与有效视角的公式;
[0072]
q2.计算出偏心率;
[0073]
q3.根据偏心率放置传感器、光学镜头,制作出适配的偏心摄像头。
[0074]
还包括以下步骤:
[0075]
l1.设置好偏心率,并设置镜头角度fov'(hfov',vfov');
[0076]
l2.通过设置的偏心率以及偏心率与有效视角的公式计算出像圆直径;
[0077]
l3.根据得到的像圆直径计算出图像到显示器的显示放大率resize';
[0078]
l4.通过resize'计算出摄像头的视场角为fov'(vfov',hfov')。
[0079]
视场角利用率公式为:
[0080][0081]
具体的,这里的0.31是法条规定的最大值;
[0082]
fov
×
p=fov;
[0083]
其中p为显示视角于原视角比值,fov为总视角或者原视角,α是显示器在人眼的视野角度;
[0084]
所述显示器和眼点之间的夹角范围为:
[0085]
0<θ≤90,0<α≤90;
[0086]
所述α的计算公式为:
[0087][0088][0089]
其中,m
aw
为屏幕宽度,s
el
为眼睛到左侧显示器的距离,s
er
为眼睛到右侧显示器的距离。
[0090]
计算显示视场角的公式为:
[0091][0092]
其中,m
aw
为显示器的宽度,m
as
为眼睛到显示器的距离,m
i1
为放大倍数要求,i代表了法规法条中的第i个区域。
[0093]
所述roi的计算公式为:
[0094][0095][0096][0097][0098]
其中,resizel,resizer是用户设置的最大允许resize率,mw是屏幕横向分辨率,mh是屏幕纵向分辨率;
[0099]
计算所述虚拟焦距f的公式为:
[0100][0101]
计算所述fov的公式为:
[0102][0103]
图像显示放大率的计算公式为:
[0104][0105][0106]
其中mw为显示器分辨率,f为虚拟焦距,hfov
l
为用户设置左侧的hfov,hfovr为用户设置右侧的hfov;
[0107]
具体的,由于s1-s9为方法的正过程,而s1-s6加上l1-l4为方法的逆过程,因此
resize在正过程中是需要用户手动输入的,而逆过程中的resize
′
是在过程中反推导而出的,是计算出来的因此需要公式。
[0108]
有效视角的计算公式为:
[0109][0110]
向上有效
[0111]
向下有效
[0112]
其中,s
r2
为sensor分辨率,xe为x轴偏心量,f
min
为最小虚拟焦距,s
r3
为sensor分辨率,ye为y轴偏心量;
[0113]
hfov"=f(hfov)=k1*hfov+k2*hfov3+k3*hfov5+k4*hfov7+k5*hfov9;
[0114]
其中,hfov"为畸变校正后的角度,f()为计算畸变校正后角度的函数,k1、k2、k3、k4、k5为畸变系数;
[0115]
具体的,可以参阅“juyang weng,member,ieee,paul cohen,and marc herniou”著录的论文“ieee transactions on pattern analysis and machine intelligence,vol.14,no.10,october 1992
”‑‑
《camera calibration with distortionmodels and accuracy evaluation》可以得到k1-k5的计算公式以及计算过程。
[0116]
最小像圆直径的公式为:
[0117]
r=sqrt(sw×
(xe+0.5)
×
sw×
(xe+0.5)+sh×
(ye+0.5)
×
sh×
(ye+0.5))
×
2;
[0118]
其中,r为最小像圆直径,sw为sensor的宽度,xe为x轴偏心量,sh为sensor高度,ye为y轴偏心量。
[0119]
若干所述输入端的数量为三个,三个所述输入端分别为左摄像头,右摄像头以及后摄像头,若干所述输出端的数量为三个,所述所述输出端分别为左显示器、右显示器以及中显示器。
[0120]
通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
[0121]
实施例:本案中的s1-s6加上q1-q3的步骤是偏心摄像头定位的方法,而s1-s6加上l1-l4的步骤则为选择和定位法的逆运用,先通过眼点的位置得到观察视线与左右显示器的夹角,α1,α2;
[0122]
具体的,关于sensor的介绍:在一些高智能化的机器中,sensor有着很重要的作用,通过sensor来达到机器的自动化控制,机器中常用的sensore有touch sonsor,光感sensor以及磁感sensor等。
[0123]
下面简单介绍一下常见的几种sensor的原理和作用以及一些简单的例子。
[0124]
1、touch sensor意是是接触性senseor,当两个物体接触时产生的一种信号,将这个信号收集传经计算机,可执行下一步的动作。这种sensor主要用来感应两个物体的关系。
[0125]
2、感光sensor,通过两个简单的电路来完成,一个电路有发光二极管或led等发光元件,另一个电路则接有一个感光元件来感就发光体,当装有sensor的两物体具有对就的关系时,感光元件就会接收到信号,将这个信号传给计算机,通过计算机来完成其它的动作。这种sensor主要用来感应是否到达预定的位置,或者用来确定两物体的相对位置关系。
[0126]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下。由语句“包括一个......限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素”。
[0127]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1