一种可充电式移动储能系统的制作方法
1.本发明属于移动储能技术领域,尤其涉及一种可充电式移动储能系统。
背景技术:
2.现阶段电动汽车的活动范围普遍集中在城区,电动汽车充电站(桩)也主要建在中心城区,随着用户普及率的升高、用户使用电动汽车习惯的养成、电动汽车活动半径的增大,电动汽车充电站(桩)也会向城区次繁华区域、大型居住小区、高速公路服务区、集中度假旅游区等区域大范围建设。但是固定式充电站(桩)由于不能移动,需要有一种移动式充电车来满足电动汽车特定状况下的充电需求,现有的移动式充电车通常是采用柴油发电机进行现场发电。现如今,全球正面临能源和环境问题的严峻挑战。减少化石能源消费,走低碳发展道路,是环境保护和节约能源的根本途径和战略选择,因此,具有节能减排的光伏移动式充电车对环境保护和便利交通有重要意义。
3.中国专利申请号201610560900.0公开了一种太阳能移动充电车及其工作方法;该充电车包括货车、设置在货车车上为电动汽车充电的充电模块、设置在货车上为充电模块提供电源的储电模块和设置在货车上的将太阳能转化为电能并将电能存储到储电模块的太阳能充电模块,所述太阳能充电模块包括三个设置在车厢上的支架和三块分别覆盖在支架上的太阳能电池板;设置在车厢顶部的第二支架、分别设置在车厢两侧第一支架和第三支架;三个太阳能电池板分别为设置在第一支架上的第一太阳能电池板、设置在第二支架上的第二太阳能电池板和设置在第三支架上的第三太阳能电池板。上述技术方案中,太阳能充电模块不完善,由于地球自转和公转的原因,电池板表面与太阳光线所成的夹角时刻都在变化,因其电池板固定在支架上,电池板很难对太阳光进行自动实时追踪,很难保证太阳光线长时间垂直照射到电池板上,容易导致太阳板光电转换效率低下。
技术实现要素:
4.针对现有技术不足,本发明的目的在于提供了一种可充电式移动储能系统,通过在现有的移动式充电车上设置太阳能充电模块,从而能够使现有的移动式充电车具备一定的节能减排功能,通过对实时太阳光的方位角、高度角进行监测,通过方位角调节机构、高度角调节机构能够实现对太阳能电池板的方位角、高度角进行调节,从而使太阳能电池板对太阳光进行自动实时追踪,保证太阳光线总能垂直照射到电池板上,提高太阳能光电转换效率。
5.本发明提供如下技术方案:一种可充电式移动储能系统;包括移动储能充电车,所述移动储能充电车包括静音箱体,所述静音箱体内设置有储能电池,所述静音箱体的上端面设置有用于给所述储能电池充电的太阳能充电模块,所述太阳能充电模块包括太阳能板回收仓,所述太阳能板回收仓的下端面与所述静音箱体上端面连接,所述太阳能板回收仓的内部水平设置有升降底板,所述升降底板的下端面通过升降机构与所述太阳能板回收仓底部连接,所述升降底板
的上端面设置有太阳能辅助充电组件,所述太阳能辅助充电组件包括太阳能电池板、采集模块、控制输出模块、方位角调节机构以及高度角调节机构。
6.优选的,所述太阳能辅助充电组件还包括底座,所述底座的上端面左侧设置有支撑架,所述方位角调节机构位于所述支撑架的上端,所述方位角调节机构用于调节所述太阳能电池板的方位角。
7.优选的,所述方位角调节机构包括盒体,所述盒体内设置有步进电机,所述步进电机的转轴上设置有球笼等速万向节,所述球笼等速万向节的另一端贯穿所述盒体的右侧面且设置有可伸缩支杆,所述太阳能电池板通过延长杆与所述可伸缩支杆平行连接。
8.优选的,所述高度角调节机构位于所述底座的上端面右侧,所述高度角调节机构用于调节所述太阳能电池板的高度角,所述高度角调节机构包括第一电缸,所述第一电缸的上端设置有u型连接块,所述u型连接块内联接有直线套筒轴承,所述可伸缩支杆的另一端套接在所述直线套筒轴承上。
9.优选的,所述采集模块包括四象限光电传感模块,所述四象限光电传感模块位于所述太阳能电池板的正面,所述四象限光电传感模块用于采集当前太阳方位角、高度角以及用于采集当前太阳能电池板方位角、高度角,并将采集的信息传送至所述控制输出模块。
10.优选的,所述采集模块还包括光强检测模块,光强检测模块位于所述太阳能电池板的正面,所述光强检测模块用于采集当前太阳的光照强度并对天气情况进行分析判断,并以信号的形式发送至所述控制输出模块,所述控制输出模块根据接受到的信号,进行对追踪模式的切换,所述追踪模式包括跟踪模式和不跟踪模式。
11.优选的,所述控制输出模块包括dsp控制器、dc/dc变换器,所述dc/dc变换器采用boost变换电路,将太阳能电池板能量转化为所需要的电压电流,采用先恒流后恒压的充电方式为所述储能电池进行充电。
12.优选的,所述dsp控制器的型号为tms320f28335,所述dsp控制器对dc/dc变换器进行mppt功率调节和用于控制所述高度角调节机构、方位角调节机构的工作。
13.优选的,所述储能电池设置有两组,其中一组所述储能电池用于供电的同时,所述控制输出模块能够使得太阳能电池板对电池容量较低的另一储能电池进行及时充电,并在充满电后,自动切换对另一组储能电池进行充放电。
14.优选的,所述静音箱体内还设置有发电机组、快速充电机、自控初级充电机和多个充电枪,所述发电机组的输出端连接有整流模块,所述整流模块的输出端通过第一电缆与所述快速充电机连接,所述整流模块的输出端还通过第二电缆与所述自控初级充电机连接,所述自控初级充电机的输出端通过第三电缆与所述储能电池连接,所述储能电池的输出端通过第四电缆与所述快速充电机连接,所述快速充电机的输出端通过第五线缆与多个所述充电枪连接。
15.优选的,太阳能辅助充电组件设置有多个,多个所述太阳能辅助充电组件呈阵列式均匀分布在所述升降底板上。
16.优选的,为了进一步提高太阳能电池板的光电转换效率,为了保证太阳能电池板能够在风力较小的情况下进行跟踪模式,所述太阳能电池板与水平面之间的夹角α、太阳能电池板的长度为d、太阳能电池板的宽度为w、风速为v,、太阳能电池板的受力为f满足以下关系:
f=m
·d·
sinα
·w·v2
/16;上式中,m为关系因子取值范围1.01-1.42;d、w单位为米;α单位为度;v单位为m/s。
17.优选的,为了提高太阳能光电转换效率,保证太阳光线总能垂直照射到电池板上,本发明了还提供了一种太阳能电池板方位角、高度角调节的方法:s1:dsp控制器通过四象限光电传感器读取当前太阳的高度角、方位角以及当前太阳能电池板的方位角、高度角;s2:dsp控制器计算光电传感器中采样太阳、太阳能电池板之间的方位角的电压差δv1、高度角的电压差δv2,以及计算太阳、太阳能电池板之间的方位角偏差δf、高度角偏差δg;s3:dsp控制器根据电压差δv1来确定步进电机需要转动的脉冲数以及根据电压差δv2来确定第一电缸的伸缩量;s4:判断δf是否大于零,大于零驱动步进电机正向转动,小于零驱动步进电机反向转动;s5:判断方位角的电压差δv1是否等于零,等于零继续s6,不等于零返回s2;s6:判断δg是否大于零,大于零控制第一电缸伸展,小于零控制第一电缸收缩;s7:判断高度角的电压差δv2是否等于零,等于零完成,不等于零返回s2。
18.与现有技术相比,本发明具有以下有益效果:(1)本发明一种可充电式移动储能系统,通过在移动式充电车上设置太阳能充电模块,通过太阳能电池板的工作,能够对储能电池进行辅助充电,降低发电机组的工作时间,从而能够大大的节省能源消耗和减少废气的排放量,还利于提高发电机组燃油经济,辅助调节发电机组负载及延长寿命。
19.(2)本发明一种可充电式移动储能系统,通过对实时太阳光的方位角、高度角进行监测,并通过方位角调节机构、高度角调节机构能够实现对太阳能电池板的方位角、高度角进行调节,从而使太阳能电池板对太阳光进行自动实时追踪,保证太阳光线总能垂直照射到电池板上,提高太阳能光电转换效率。
20.(3)本发明一种可充电式移动储能系统,通过设置太阳能板回收仓,并将多个太阳能辅助充电组件通过升降底板设置在太阳能板回收仓内,从而能够保证多个太阳能电池板在不跟踪模式下能够平铺在太阳能板回收仓的上表面,能够进行普通充电且不妨碍充电车的正常行驶。
21.(4)本发明一种可充电式移动储能系统,通过对太阳能电池板与水平面之间的夹角α、太阳能电池板的长度d、太阳能电池板的宽度w、风速v、太阳能电池板的受力f之间的限定,从而能够在风力较小的情况下,即太阳能电池板的受力没有超过预设阈值时,控制器能够保持在跟踪模式,从而能够进一步提高太阳能电池板的光电转换效率。
附图说明
22.为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根
据这些附图获得其他相关的附图。
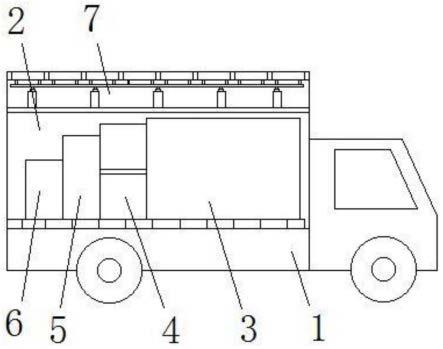
23.图1是本发明的整体结构示意图。
24.图2是本发明的太阳能辅助充电组件结构示意图。
25.图3是本发明的u型连接块结构示意图。
26.图4是本发明的升降底板上太阳能辅助充电组件分布示意图。
27.图5是本发明的结构框图。
28.图6是本发明的太阳能电池板方位角、高度角调节的方法流程图。
29.图中:1、移动储能充电车;2、静音箱体;3、发电机组;4、储能电池;5、快速充电机;6、充电枪;7、太阳能板回收仓;81、底座;82、支撑架;83、第一电缸;84、盒体;85、步进电机;86、球笼等速万向节;87、可伸缩支杆;88、太阳能电池板;89、u型连接块;9、升降底板;10、直线套筒轴承;11、四象限光电传感模块;12、光强检测模块。
具体实施方式
30.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
31.因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
32.实施例一:请参考图1-2,一种可充电式移动储能系统;包括移动储能充电车1,移动储能充电车1包括静音箱体2,静音箱体2内设置有储能电池4,静音箱体2的上端面设置有用于给储能电池4充电的太阳能充电模块,太阳能充电模块包括太阳能板回收仓7,太阳能板回收仓7的下端面与静音箱体2上端面连接,太阳能板回收仓7的内部水平设置有升降底板9,升降底板9的下端面通过升降机构与太阳能板回收仓7底部连接,升降底板9的上端面设置有太阳能辅助充电组件,太阳能辅助充电组件包括太阳能电池板88、采集模块、控制输出模块、方位角调节机构以及高度角调节机构。太阳能辅助充电组件设置有多个,多个太阳能辅助充电组件呈阵列式均匀分布在升降底板9上。
33.通过该设置,能够保证多个太阳能电池板88在不跟踪模式下能够平铺在太阳能板回收仓7的上表面,能够进行普通充电且不妨碍移动储能充电车1的正常行驶;通过太阳能电池板88的工作,通过控制输出模块能够将太阳能电池板88能量转化为所需要的电压电流,采用先恒流后恒压的充电方式为储能电池4进行辅助充电,从而降低发电机组3的工作时间,从而能够大大的节省能源消耗和减少废气的排放量,还利于提高发电机组燃油经济,辅助调节发电机组负载及延长寿命。
34.实施例二:请参考图1-5,在实施例一的基础上,太阳能辅助充电组件还包括底座81,底座81
的上端面左侧设置有支撑架82,方位角调节机构位于支撑架82的上端,方位角调节机构用于调节太阳能电池板88的方位角。
35.方位角调节机构包括盒体84,盒体84内设置有步进电机85,步进电机85的转轴上设置有球笼等速万向节86,球笼等速万向节86的另一端贯穿盒体84的右侧面且设置有可伸缩支杆87,太阳能电池板88通过延长杆与可伸缩支杆87平行连接。
36.通过方位角调节机构,能够保证通过步进电机85的转动,能够使太阳能电池板88跟随可伸缩支杆87绕可伸缩支杆87轴线转动,进而实现对太阳能电池板88方位角的调节。
37.高度角调节机构位于底座81的上端面右侧,高度角调节机构用于调节太阳能电池板88的高度角,高度角调节机构包括第一电缸83,第一电缸83的上端设置有u型连接块89,u型连接块89内联接有直线套筒轴承10,可伸缩支杆87的另一端套接在直线套筒轴承10上。通过高度角调节机构,能够保证直线套筒轴承10能够在u型连接块89内转动,可伸缩支杆87能够在直线套筒轴承10内滑动,通过第一电缸83的伸缩,以支撑架82为高度角支撑臂,能够使太阳能电池板88跟随可伸缩支杆87以球笼等速万向节86为圆心上下转动,进而实现对太阳能电池板88高度角的调节。
38.采集模块包括四象限光电传感模块11,四象限光电传感模块11位于太阳能电池板88的正面,四象限光电传感模块11用于采集当前太阳方位角、高度角以及用于采集当前太阳能电池板88方位角、高度角,并将采集的信息传送至控制输出模块。本系统采用型号为qp50-6的四象限光电探测传感器,光斑照射在四个象限的面积s决定了传感器的输出光电流,该传感器分辨率高、响应快,可以应用于本追踪系统,从而探测目标位置的连续变化。光斑位于光电传感器中心时,各象限的输出光电流相等,偏差为0。当太阳光偏移,四个象限的光辐射能量不同,便会产生不同的光电流,通过dsp控制器对偏差信号进行处理,使得光斑往探测器中心移动,同时调整太阳能电池板的高度角和方位角,使太阳能电池板始终垂直正对太阳。
39.采集模块还包括光强检测模块12,光强检测模块12位于太阳能电池板88的正面,光强检测模块12用于采集当前太阳的光照强度并对天气情况进行分析判断,并以信号的形式发送至控制输出模块,控制输出模块根据接受到的信号,进行对追踪模式的切换,追踪模式包括跟踪模式和不跟踪模式。通过光强检测模块对天气情况进行分析判断,进而追踪模式进行调控。光强检测模块在判断阴雨天时,切换到不跟踪模式,此时多个太阳能电池板88在不跟踪模式下平铺在太阳能板回收仓7的上表面;在晴好天气,且移动储能充电车1不行驶时,通过太阳能辅助充电组件进行对太阳追踪;使得系统具有跟踪效率高、功能全面等优点。
40.控制输出模块包括dsp控制器、dc/dc变换器,dc/dc变换器采用boost变换电路,将太阳能电池板88能量转化为所需要的电压电流,采用先恒流后恒压的充电方式为储能电池4进行充电。
41.dsp控制器的型号为tms320f28335,dsp控制器对dc/dc变换器进行mppt功率调节和用于控制高度角调节机构、方位角调节机构的工作。
42.储能电池4设置有两组,其中一组储能电池4用于供电的同时,控制输出模块能够使得太阳能电池板88对电池容量较低的另一储能电池4进行及时充电,并在充满电后,自动切换对另一组储能电池4进行充放电。
43.静音箱体2内还设置有发电机组3、快速充电机5、自控初级充电机和多个充电枪6,发电机组3的输出端连接有整流模块,整流模块的输出端通过第一电缆与快速充电机5连接,整流模块的输出端还通过第二电缆与自控初级充电机连接,自控初级充电机的输出端通过第三电缆与储能电池4连接,储能电池4的输出端通过第四电缆与快速充电机5连接,快速充电机5的输出端通过第五线缆与多个充电枪6连接。通过该设置,能够保证发电机组3能够直接给快速充电机5供电,也能够将电能通过自控初级充电机储存在蓄能电池4中,太阳能充电模块也能够将电能存储在蓄能电池4中,蓄能电池4能够给快速充电机5供电。
44.太阳能辅助充电组件还包括风速传感器,风速传感器用于检测实时风速,并以信号的形式发送至控制输出模块。
45.为了进一步提高太阳能电池板的光电转换效率,为了保证太阳能电池板能够在风力较小的情况下进行跟踪模式,太阳能电池板与水平面之间的夹角α、太阳能电池板的长度为d、太阳能电池板的宽度为w、风速为v,、太阳能电池板的受力为f满足以下关系:f=m
·d·
sinα
·w·v2
/16;上式中,m为关系因子取值范围1.01-1.42;d、w单位为米;α单位为度;v单位为m/s。
46.通过对太阳能电池板与水平面之间的夹角α、太阳能电池板的长度d、太阳能电池板的宽度w、风速v、太阳能电池板的受力f之间的限定,从而能够在风力较小的情况下,即太阳能电池板的受力没有超过预设阈值时,控制器能够保持在跟踪模式,从而能够进一步提高太阳能电池板的光电转换效率,当超过预设阈值时,dsp控制器能够切换到不跟踪模式,保证多个太阳能电池板在不跟踪模式下能够平铺在太阳能板回收仓的上表面,降低因风力过大对太阳能板的损害。
47.实施例三:请参考图6,在实施例二的基础上,为了提高太阳能光电转换效率,保证太阳光线总能垂直照射到电池板上,本发明了还提供了一种太阳能电池板方位角、高度角调节的方法:s1:dsp控制器通过四象限光电传感器读取当前太阳的高度角、方位角以及当前太阳能电池板的方位角、高度角;s2:dsp控制器计算光电传感器中采样太阳、太阳能电池板之间的方位角的电压差δv1、高度角的电压差δv2,以及计算太阳、太阳能电池板之间的方位角偏差δf、高度角偏差δg;s3:dsp控制器根据电压差δv1来确定步进电机需要转动的脉冲数以及根据电压差δv2来确定第一电缸的伸缩量;s4:判断δf是否大于零,大于零驱动步进电机正向转动,小于零驱动步进电机反向转动;s5:判断方位角的电压差δv1是否等于零,等于零继续s6,不等于零返回s2;s6:判断δg是否大于零,大于零控制第一电缸伸展,小于零控制第一电缸收缩;s7:判断高度角的电压差δv2是否等于零,等于零完成,不等于零返回s2。
48.本发明中未详细阐述的其它技术方案均为本领域的现有技术,在此不再赘述。
49.以上仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术
人员来说,本发明可以有各种更改和变化;凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1