混合驱动单元的制作方法
1.本公开涉及一种混合驱动单元,特别是用于车辆的混合驱动单元。
背景技术:
2.在汽车变速器领域中,已知各种装置和机构允许从诸如内燃发动机或电动马达的动力源至两个或多个车轮或桥半轴的扭矩的受控传递。
3.例如,us 2017/059023 a1涉及一种用于车辆的扭矩矢量装置,该装置包括经由变速器连接到差速器机构的电动马达,并且进一步包括用于在第一模式和第二模式之间改变变速器的扭矩路径的至少一个控制装置,在第一模式中,变速器将电动马达连接到差速器机构的输入轴以用于混合驱动模式,在第二模式中,变速器将电动马达连接到差速器机构的输出轴以用于扭矩矢量模式。
技术实现要素:
4.本公开解决了为车辆设计混合驱动单元的问题,该混合驱动单元以简单并且有效的方式提供扭矩矢量功能。
5.权利要求1中限定了提供这种功能的混合驱动单元。在从属权利要求中描述了特定实施例。
6.具体地,目前提出的混合驱动单元包括电动马达、用于与另外的马达连接的车桥差速器、连接至车桥差速器的第一桥半轴和第二桥半轴、第一离合装置以及第二离合装置,其中电动马达经由第一离合装置与第一桥半轴选择性地驱动地接合,并且经由第二离合装置与第二桥半轴选择性地驱动地接合。
7.由于电动马达经由第一离合装置与第一桥半轴选择性地驱动地可接合,并且经由第二离合装置与第二桥半轴选择性地驱动地可接合,通过控制第一离合装置和第二离合装置,可控制从电动马达到第一桥半轴和第二桥半轴的扭矩传递。
8.例如,第一离合装置和第二离合装置可以各自具有打开状态、关闭状态和滑动状态。第一/第二离合装置可构造成使得当第一/第二离合装置处于打开状态中时,分别经过第一/第二离合装置从电动马达到第一/第二桥半轴的扭矩传递被中断。第一/第二离合装置可构造成使得当第一/第二离合装置处于关闭状态中时,第一/第二离合装置的输入部与第一/第二离合装置的输出部之间没有滑动,并且非零扭矩可分别经过第一/第二离合装置从电动马达传递到第一/第二桥半轴。并且第一/第二离合装置可构造成使得当第一/第二离合装置处于滑动状态中时,在第一/第二离合装置的输入部和第一/第二离合装置的输出部之间有滑动,从而非零扭矩可以分别经过第一/第二离合装置从电动马达传递到第一/第二桥半轴。例如,第一/第二离合装置可以构造成使得当第一/第二离合装置处于滑动状态中时,第一/第二离合装置的输入部和第一/第二离合装置的输出部之间的滑动是可变的或连续可变的,以使分别通过改变第一/第二离合装置的输入部和第一/第二离合装置的输出部之间的滑动,经过第一/第二离合装置从电动马达传递到第一/第二桥半轴的扭矩是可变
的或连续的。
9.例如,第一/第二离合装置可以包括湿式离合器,该湿式离合器包括连接到第一/第二离合装置的输入部的多个输入摩擦板和连接到第一/第二离合装置的输出部的多个输出摩擦板,其中,输入摩擦板和输出摩擦板交替设置,并且输入摩擦板和输出摩擦板之间的摩擦接合的程度分别通过控制第一/第二离合装置的离合器腔室中的流体静压力而是可控制的。然而,可以理解的是,第一/第二离合装置可以包括汽车变速器领域中已知的任何其他类型的离合装置。
10.混合驱动单元还可以包括变速器轴,该变速器轴布置成平行于第一桥半轴和第二桥半轴。随后,电动马达可以经由变速器轴和第一离合装置与第一桥半轴选择性地驱动地可接合,并且经由变速器轴和第二离合装置与第二桥半轴选择性地驱动地可接合。这种布置可以允许特别紧凑的设计。
11.在这种情况下,电动马达可经由设置在变速器轴上的第一变速器齿轮和设置在第一桥半轴上的第一桥齿轮与第一桥半轴选择性地驱动地可接合。例如,第一变速器齿轮可以与第一桥齿轮啮合。第一离合装置可构造成将第一变速器齿轮与变速器轴选择性地驱动地接合,或者将第一桥齿轮与第一桥半轴选择性地驱动地接合。替代地或附加地,电动马达可以经由设置在变速器轴上的第二变速器齿轮和设置在第二桥半轴上的第二桥齿轮与第二桥半轴选择性地驱动地可接合。例如,第二变速器齿轮可以与第二桥齿轮啮合。第二离合装置可构造成将第二变速器齿轮与变速器轴选择性地驱动地接合,或者将第二桥齿轮与第二桥半轴选择性地驱动地接合。
12.混合驱动单元还可以包括控制器,该控制器构造成彼此独立地控制第一离合装和第二离合装置。通常,控制器包括电子电路,电子电路包括可编程的处理单元,诸如微处理器、现场可编程门阵列(fpga)或类似物。例如,控制器可构造成控制第一离合装置和第二离合装置使得在给定的瞬间,第一离合装置的输入部和输出部之间的接合水平与第二离合装置的输入部和输出部之间的接合水平不同。以这种方式,控制器可以构造成控制离合装置以作为主动差速器和/或主动扭矩矢量装置。
13.混合驱动单元可进一步包括第一速度传感器以及第二速度传感器,第一速度传感器用于测量第一桥半轴或与第一桥半轴驱动地连接或驱动地可连接的第一车轮的转速,第二速度传感器用于测量第二桥半轴或与第二桥半轴驱动地连接或驱动地可连接的第二车轮的转速。随后,控制器可构造成基于以下项中的至少一项或全部项来控制第一离合装置和第二离合装置:从第一速度传感器接收的第一速度传感器信号或第一速度传感器数据,以及从第二速度传感器接收的第二速度传感器信号或第二速度传感器数据。例如,控制器可以构造成使得当第一/第二速度传感器检测到第一/第二桥半轴超速时,诸如当安装在第一/第二桥半轴上的第一/第二车轮失去牵引力时,控制器分别命令第一/第二离合装置脱离或至少部分脱离,从而减少经过第一/第二离合装置从电动马达到第一/第二桥半轴的扭矩传递。
14.混合驱动单元可进一步包括第一制动器以及第二制动器,第一制动器用于制动第一桥半轴或用于制动安装在第一桥半轴上的第一车轮,第二制动器用于制动第二桥半轴或用于制动安装在第二桥半轴上的第二车轮。随后,控制器可构造成基于以下项中的至少一项或全部项来控制第一制动器和第二制动器:第一速度传感器信号或第一速度传感器数
据,以及第二速度传感器信号或第二速度传感器数据。例如,控制器可以构造成使得当第一/第二速度传感器检测到第一/第二桥半轴超速时,诸如当安装在第一/第二桥半轴上的第一/第二轮失去牵引力时,控制器分别命令第一/第二制动器制动或减慢第一/第二桥半轴。
15.替代地或附加地,控制器可以构造成基于以下项中的至少一项或全部项来控制第一离合装置和第二离合装置:车辆扭矩请求、车辆速度请求和转向角。例如,控制器可以构造成使得当其接收到用于增加扭矩和/或速度的请求时,控制器分别命令第一离合装置和/或第二离合装置接合或至少部分地接合或增加接合,从而增加经过第一/第二离合装置从电动马达至第一桥半轴和/或至第二桥半轴的扭矩传递。
16.第一桥半轴和第二桥半轴可以同轴对齐。混合驱动单元还可以包括第一车轮以及第二车轮,第一车轮安装在第一桥半轴上并与之同轴对齐,第二车轮安装第二桥半轴上并与之同轴对齐。
17.电动马达可包括与第一桥半轴同轴对齐或平行布置的转子。例如,在特别紧凑的布置中,第一桥半轴和第二桥半轴中的一个桥半轴可以穿过电动马达的转子。
18.混合驱动单元可以附加地包括另外的马达,诸如内燃发动机,其中,该另外的马达构造成经由车桥差速器驱动第一桥半轴和第二桥半轴。
附图说明
19.目前提出的电驱动单元的实施例在附图中描绘出来,并且在下文的具体实施方式中描述。在附图中:
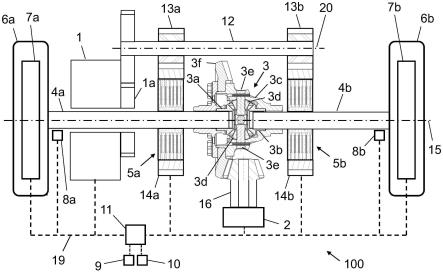
20.图1示意性地示出了根据第一实施例的目前提出的混合驱动单元,其中电动马达的转子与两个桥半轴同轴对齐;
21.图2示意性地示出了图1的混合驱动单元,其中箭头表示经由差速器在内燃发动机和两个桥半轴之间的扭矩流;
22.图3示意性地示出了图1的混合驱动单元,其中箭头表示经由两个离合器装置在电动马达和两个桥半轴之间的扭矩流;
23.图4示意性地示出了图1的混合驱动单元,其中箭头表示经由差速器在内燃发动机和两个桥半轴之间的扭矩流,以及经由两个离合器装置在电动马达和两个桥半轴之间的扭矩流;
24.图5示意性地示出了图1的混合驱动单元,其中箭头表示经由差速器在内燃发动机和两个桥半轴之间的扭矩流,以及经由两个离合器装置之一在电动马达和两个桥半轴之一之间的扭矩流;
25.图6示意性地示出了根据第二实施例的目前提出的混合驱动单元,其中电动马达的转子设置成与两个桥半轴平行并且有一定距离。
具体实施方式
26.图1示出了根据第一实施例的目前提出类型的混合驱动单元100的示意图。混合驱动单元100包括电动马达1、另外的马达2、差速器3、第一桥半轴4a、第二桥半轴4b、第一离合装置5a和第二离合装置5b。电动马达1可以包括例如任何类型的同步或异步电机。另外的马
达2可以包括内燃发动机、另外的电动马达、液压马达或类似物。如图所示,桥半轴4a、4b可以相对于共同的旋转轴线15同轴对齐。然而,同样可以设想的是,桥半轴4a、4b可以相对于彼此稍微倾斜。在图1中描绘的实施例中,电动马达1的转子1a与第一桥半轴4a同轴对齐。具体地,电动马达1布置成围绕第一桥半轴4a。第一桥半轴4a穿过电动马达1或穿过电动马达1的转子1a,由此提供特别紧凑的布置。
27.差速器3可以是例如开放式差速器。具体地,差速器3包括连接至第一桥半轴4a连的第一侧齿轮3a、连接至第二桥半轴4b的第二侧齿轮3b、差速器壳体3c以及可旋转地安装在与差速器壳体3c连接的差速器销3e上的星形齿轮3d。差速器3允许连接至差速器3的桥半轴4a、4b以不同速度旋转。然而,在一些实施例中,差速器3可能包括用于将侧齿轮3a、3b选择性地可旋转地锁定到差速器壳体3的附加的锁定机构。另外的马达2构成经由差速器3驱动桥半轴4a、4b。具体地,另外的马达2通过小锥齿轮16和差速器3的齿圈3f而与差速器3驱动地接合。齿圈3f刚性连接到差速器壳体3c。
28.电动马达1经由变速器轴12、设置在变速器轴12上的第一变速器齿轮13a、设置在第一桥半轴4a上的第一桥齿轮14a以及经由第一离合装置5a而选择性地驱动地连接到第一桥半轴4a。在此,第一变速器齿轮13a与第一桥齿轮14a啮合。然而,可以理解的是,在替代性实施例中,第一变速器齿轮13a和第一桥齿轮14a可以经由一个或多个另外的变速器部件,例如经由一个或多个另外的齿轮和/或经由一个或多个另外的轴,而彼此驱动地接合。而电动马达1经由变速器轴12、设置在变速器轴12上的第二变速器齿轮13b、设置在第二桥半轴4b上的第二桥齿轮14b以及经由第二离合装置5b而选择性地驱动地连接到第二桥半轴4b。在此,第二变速器齿轮13b与第二桥齿轮14b啮合。然而,可以理解的是,在替代性实施例中,第二变速器齿轮13b和第二桥齿轮14a可以经由一个或多个另外的变速器部件,例如经由一个或多个另外的齿轮或经由一个或多个另外的轴,而彼此驱动地接合。
29.变速器轴12设置成使得,变速器轴12的旋转轴线20布置成与桥半轴4a、4b或由桥半轴4a、4b限定的旋转轴线15平行并有一定距离。在图1中描绘的实施例中,第一离合装置5a设置成围绕第一桥半轴4a并且将第一桥齿轮14a与第一桥半轴4a选择性地驱动地接合。第一变速器齿轮13a刚性连接到变速器轴12。同样,第二离合装置5b设置成围绕第二桥半轴4b并且将第二桥齿轮14b与第二桥半轴4b选择性地驱动地接合。第二变速器齿轮13b刚性连接到变速器轴12。可以理解的是,在没有明确在此描绘的替代性实施例中,一个或两个离合器装置5a、5b可以替代地设置成围绕变速器轴12并且构造成分别与变速器轴12选择性地驱动地接合变速器齿轮13a、13b中的一个或两个齿轮。在这种情况下,桥齿轮14a、14b中的一个或两个桥齿轮可以分别刚性连接到桥半轴4a、4b中的一个或两个桥半轴。
30.离合装置5a、5b通常构造成分别在离合装置5a、5b的输入部和输出部之间提供可变或连续可变的摩擦接合。具体地,在图1中描绘的实施例中,第一离合装置5a构造成在第一桥齿轮14a和第一桥半轴4a之间提供可变或连续可变的摩擦接合。第二离合器装置5b构造成在第二桥齿轮14b和第二桥半轴4b之间提供可变的摩擦接合。例如,离合器装置5a、5b可以各自包括湿式离合器,其中连接至离合器装置的输入部的多个输入摩擦板可以通过改变离合器腔室中的流体静压力,例如借助于打开或关闭控制阀和/或通过改变由诸如泵或液压缸的压力源提供的压力,而与连接至离合器装置的输出部的多个输出摩擦板选择性地摩擦地接合。然而,可以理解的是,离合装置5a、5b可以包括者在汽车变速器技术中已知的
其他类型的离合器或离合装置,诸如但不限于干式离合器、锥形离合器或类似物。
31.混合驱动单元100进一步包括第一车轮6a、第一制动器7a以及第一速度传感器8a,第一车轮6a驱动地连接或驱动地可连接至第一桥半轴4a,第一制动器7a用于制动第一桥半轴4a和/或制动第一车轮6a,第一速度传感器8a用于测量第一桥半轴4a和/或第一车轮6a的旋转速度。并且,混合驱动单元100包括第二车轮6b、第二制动器7b以及第二速度传感器8b,第二车轮6b驱动地连接或驱动地可连接至第二桥半轴4b,第二制动器7b用于制动第二桥半轴4b和/或制动第二车轮6b,第二速度传感器8b用于测量第二桥半轴4b和/或第二车轮6b的旋转速度。混合驱动单元100进一步包括扭矩请求接收装置9,诸如但不限于油门踏板、操纵杆或类似物。并且混合驱动单元100包括转向角传感器10。
32.混合驱动单元100还包括控制器11。控制器11通常包括这样的电子电路,即,电子电路包括可编程的处理单元,诸如但不限于微处理器、fpga或类似物。控制器11可以包括单个装置或多个独立的装置。控制器11构造成接收一个或多个输入信号,该一个或多个输入信号包括来自扭矩请求接收装置9的扭矩请求、来自转向角传感器10的转向角或转向请求以及分别来自速度传感器8a、8b并指示桥半轴4a、4b和/或车轮6a、6b的转速的速度信号或速度数据中的一个或多个。基于这些输入信号中的一个或多个或全部信号,控制器11构造成控制电动马达1,例如由电动马达1提供的扭矩和/或速度、另外的电动马达2,例如由另外的电动马达2提供的扭矩和/或速度、制动器7a、7b以及离合装置5a、5b,例如离合装置5a、5b的输入部和输出部之间的接合程度,中的一个或多个或全部。特别地,控制器11构造成彼此独立地控制离合器装置5a、5b。更具体地,控制器11构造成独立于第二离合装置5b的输入部和输出部之间的接合程度,来控制第一离合装置5a的输入部和输出部之间的接合程度。在附图中,控制器11与马达1、2,离合装置5a、5b,制动器7a、7b,传感器8a、8b和装置9、10之间的通信线路由虚线19表示。通信线路19可以包括有线或无线连接。
33.图2-5示出了不同的非限制性的图1的混合驱动单元100的运行模式的示例。在此以及在下文的所有附图中,不同附图中的重复特征用相同的附图标记表示。
34.图2示出了混合驱动单元100的运行模式,其中另外的马达2经由差速器3将扭矩传递到桥半轴4a、4b和车轮6a、6b,如箭头17、17a、17b所示。相同大小的扭矩或不同大小的扭矩可以经过差速器3传递到桥半轴4a、4b。例如,当包括混合动力驱动装置100的车辆绕着弯道行驶并且车轮6a、6b以不同的速度旋转时,不同大小的扭矩可以传递到桥半轴4a、4b。同时,电动马达1不对桥半轴4a、4b传递扭矩,例如因为基于来自扭矩请求接收装置9的扭矩请求并且控制器11确定所请求的扭矩可由另外的马达2单独提供,和/或因为控制器11确定连接到并且对电动马达1提供动力的电池的充电状况低于阈值电量。
35.图3示出了混合驱动单元100的另一运行模式,其中电动马达1经由离合器装置5a、5b将扭矩传递到桥半轴4a、4b和车轮6a、6b,如箭头18、18a、18b所示。在图3中,离合装置5a、5b中一个或两个离合装置关闭或离合装置5a、5b中一个或两个离合装置处于滑动状态并且至少部分处于摩擦接合,该事实由虚线箭头表示。同时,另外的马达2不对桥半轴4a、4b传递扭矩,例如因为基于来自扭矩请求接收装置9的扭矩请求并且控制器11确定所请求的扭矩可由电动马达1单独提供。例如,在另外的马达2是或包括内燃发动机的情况下,只使用电动马达1可以减少排放。或者,另外的马达2不对桥半轴4a、4b传递扭矩,例如因为控制器11确定对另外的马达2提供燃料的燃料箱的填充水平低于阈值填充水平。
36.仍参考图3中描绘的运行模式,基于来自扭矩请求接收装置9、转向角传感器10和速度传感器8a、8b中的一个或多个或全部的输入信号,控制器11可以控制离合装置5a、5b将相同大小的扭矩或不同大小的扭矩从电动马达1传递到两个桥半轴4a、4b。例如,基于来自装置9、10和速度传感器8a、8b中一个或多个或全部的输入信号,控制器11可以通过控制离合器装置5a、5b中每一个的输入部和输出部之间的摩擦接合程度来影响或控制经由离合器装置5a、5b传递到桥半轴4a、4b中每一个的扭矩大小。特别地,控制器11可以构造成控制离合装置5a、5b使得在给定的瞬间,第一离合装置5a的输入部和输出部之间的接合水平与第二离合装置5b的输入部和输出部之间的接合水平不同。以这种方式,控制器11可以控制离合装置5a、5b作为将扭矩从电动马达1分配到桥半轴4a、4b的差速器或主动差速器。附加地或替代地,控制器11可以构造成通过控制制动器7a、7b来影响或控制传递到桥半轴4a、4b中每一个和/或车轮6a、6b中每一个的扭矩大小。
37.例如,当从转向角传感器10接收到的转向角或转向请求表明车辆正在直行,并且速度传感器8a、8b表明两个桥半轴4a、4b和/或两个车轮6a、6b以相同的速度转动时,控制器11可以控制离合装置5a、5b使得第一离合装置5a的输入部和输出部之间的接合水平与第二离合装置5b的输入部和输出部之间的接合水平相等。以这种方式,经由第一离合装置5a从电动马达1传递到第一桥半轴4a和第一车轮6a的扭矩大小与经由第二离合装置5b从电动马达1传递到第二桥半轴4b和第二车轮6b的扭矩大小相等。
38.例如,其中请求一定大小的扭矩传递到第一车轮6a的请求与请求一定大小的扭矩传递到第二车轮6b的请求可能不同的状况可以包括但不限于例如车辆绕着弯道行驶、两个车轮6a、6b在不同的土壤类型上行驶,或者车轮6a、6b之间的旋转速度差超过阈值速度差。例如,当从设备9收到的扭矩请求、从转向角传感器10收到的转向角或转向请求,或者从速度传感器8a、8b收到的速度信号中的一个或多个或全部表明的是提供在一个或两个车轮6a、6b上的扭矩大小和/或速度要改变时,控制器11可以改变由电动马达1提供的扭矩和/或速度,和/或控制器11可以通过分别改变离合器装置5a、5b中一个或两个的输入部和输出部之间的接合程度来改变经过离合器装置5a、5b中一个或两个的扭矩传递。具体地,从电动马达1传递到第一桥半轴4a的扭矩大小可以通过增加/减少第一离合装置5a的输入部和输出部之间的接合来增加/减少,并且从电动马达1传递到第二桥半轴4b的扭矩大小可以通过增加/减少第二离合装置5b的输入部和输出部之间的接合来增加/减少。附加地或替代地,控制器11可以至少部分地致动或释放制动器7a、7b中一个或两个。
39.图4示出了混合驱动单元100的另一运行模式,其中电动马达1和另外的马达2两者都将扭矩传递到桥半轴4a、4b和车轮6a、6b,如再次用箭头17、17a、17b、18、18a、18b表示。例如,当控制器确定从装置9收到的扭矩请求可能无法由两个马达1、2中的一个单独满足时,控制器11可以命令两个马达1、2将扭矩传递到桥半轴4a、4b和车轮6a、6b。同样,在图4中描绘的运行模式中,控制器11可以控制离合器装置5a、5b将不同大小的扭矩从电动马达1传递到桥半轴4a、4b,如上文参考图3所解释的。
40.例如,图5示出了图4中描绘的混合驱动单元100的运行模式的变型,其中,扭矩经由第一离合装置5a从电动马达1传递到第一桥半轴4a,并且没有扭矩经由第二离合装置5b从第一电动马达1传递。也即,控制器11控制第一离合装置5a使得第一离合装置5a的输入部和输出部完全或至少部分地彼此接合,并且控制器11打开第二离合装置5b。以这种方式,扭
矩可以从电动马达1附加到桥半轴4a、4b中的仅一个,从而例如在两个桥半轴4a、4b之间提供差速扭矩。
41.图6示出了根据第二实施例的目前提出类型的混合驱动单元200的示意图。如前所述,重复特征由相同的附图标记表示。根据图6的混合驱动单元200与根据图1-5的混合驱动单元不同在于,电动马达1的转子与变速器轴12同轴对齐。例如,在根据图6的混合驱动单元200中,电动马达1的转子可以直接连接到变速器轴12。然而,可以理解的是,在此处没有明确描述的混合驱动单元200的替代实施例中,电动马达1的转子可以借助于例如万向接头和/或扭转减振器而连接到变速器轴12。在图6中,锥齿轮16通常设置在变速器轴12的上方或下方。
42.附图标记列表:
[0043]1ꢀꢀꢀꢀ
电动马达
[0044]
1a
ꢀꢀꢀ
马达
[0045]2ꢀꢀꢀꢀ
另外的马达
[0046]3ꢀꢀꢀꢀ
差速器
[0047]
3a 第一侧齿轮
[0048]
3b
ꢀꢀꢀ
第二侧齿轮
[0049]
3c
ꢀꢀꢀ
差速器壳体
[0050]
3d
ꢀꢀꢀ
星形齿轮
[0051]
3e
ꢀꢀꢀ
差速器销
[0052]
3f
ꢀꢀꢀ
齿圈
[0053]
4a
ꢀꢀꢀ
第一桥半轴
[0054]
4b
ꢀꢀꢀ
第二桥半轴
[0055]
5a
ꢀꢀꢀ
第一离合装置
[0056]
5b
ꢀꢀꢀ
第二离合装置,
[0057]
6a
ꢀꢀꢀ
第一车轮
[0058]
6b
ꢀꢀꢀ
第二车轮
[0059]
7a
ꢀꢀꢀ
第一制动器
[0060]
7b
ꢀꢀꢀ
第二制动器
[0061]
8a
ꢀꢀꢀ
第一速度传感器
[0062]
8b
ꢀꢀꢀ
第二速度传感器
[0063]9ꢀꢀꢀꢀ
扭矩请求接收装置
[0064]
10
ꢀꢀꢀ
转向请求接收装置
[0065]
11
ꢀꢀꢀ
控制器
[0066]
12
ꢀꢀꢀ
变速器轴
[0067]
13a 第一变速器齿轮
[0068]
13b 第二变速器齿轮
[0069]
14a 第一桥齿轮
[0070]
14b 第二桥齿轮
[0071]
15
ꢀꢀꢀ
第一桥半轴4a和第二桥半轴4b的旋转轴线
[0072]
16
ꢀꢀꢀ
锥齿轮
[0073]
17,17a,17b 扭矩箭头
[0074]
18,18a,18b 扭矩箭头
[0075]
19
ꢀꢀꢀ
通信线路
[0076]
20
ꢀꢀꢀ
变速器轴12的旋转轴线
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1