一种在狭窄道路的通行方法与流程
1.本发明涉及一种用于控制车辆在狭窄道路的通行方法,以及一种用于执行该方法的系统和一种具有该系统的机动车辆。
背景技术:
2.在农村地区,经常遇到由于道路太狭窄导致无法让两辆相对行驶的车辆通过的情况。在这种情况下,如果司机没有及时发现情况,其中一辆车必须倒车,直到找到一个有足够空间的路段,以便另一辆车可以驶过。这类的路段可以设计为,例如,作为避障的停车点。倒车既棘手又费时,尤其是在狭窄的道路上,而且很复杂,尤其是对于卡车或公共汽车等较大的车辆。
3.在寒冷的冰雪条件下,两车道的道路也可能变狭窄。清雪车辆同样会迫使迎面而来的车辆倒车,路况使倒车更加困难。
4.此外,狭窄的道路通常不会设计成在其起点就可以看到狭窄路段的终点。不仅是弯道,而且树木、灌木丛或人造结构也会限制能见度。必须根据条件调整驾驶技术。
5.因此,本发明的目的是在狭窄道路上设计多个车辆的更安全的通道。
技术实现要素:
6.该目的通过根据权利要求1的方法、根据权利要求9的系统和根据权利要求10的车辆实现。本发明的其他有益设计可以在示例实施例、从属权利要求和描述中找到。本发明的设计可以有益地相互组合。
7.本发明的第一方面用于控制第一车辆当前行驶方向的至少一个前方路段的通行方法,其中所述路段的宽度与所述第一车辆的宽度大致相同,包括以下步骤:
[0008]-检测前方路段;
[0009]-假设可以在不受其他车辆影响的情况下驾驶通过路段,确定第一车辆到达路段所需的距离并计算所需时间,以及计算离开路段的时间;
[0010]-第一车辆将数据传输至网络,其中数据选自群组,群组包括到达、离开路段的预计时间(假设可以在不受其他车辆影响的情况下驾驶通过路段),进入路段的位置,行驶方向和第一车辆的类型;
[0011]-识别预计将在路段内移动的至少一辆第二车辆,接收与第二车辆有关的数据,并确定第一车辆和第二车辆在路段内相遇的概率;
[0012]-确定两辆车辆在每种情况下的速度,以避免第一车辆和第二车辆在路段内相遇。
[0013]
根据本发明的方法通过控制各个车辆的速度有利地使至少两辆车辆能够沿着狭窄的道路行驶。路段前方的宽度与第一车辆的宽度的大体一致,这也称为瓶颈路段。该方法适用于不同长度的瓶颈路段。瓶颈路段的长度可以在一米到几公里之间。
[0014]
在该方法中,基于识别出的瓶颈路段和检测到的其他车辆,对到达瓶颈路段的行驶时间进行优化,从而有利地实现舒适和安全的驾驶,其中,与传统驾驶相比,在瓶颈路段
区域发生强制倒车或车辆碰撞风险的概率较低。车辆被设计为捕获与方法相关的数据,即,例如,使用摄像机、测距设备等。可以在车辆中进一步访问与地图相关的数据,例如,通过提供有关前方道路瓶颈路段信息的导航设备。该车辆旨在传输和接收数据。车辆可以连接到处理数据和传输指令的服务器。车辆也可以自己处理数据,即它本身可以相应地充当服务器,与其他车辆连接,从其他车辆接收与其位置和速度相关的数据并输出控制命令。还可以从驾驶历史中识别瓶颈路段,即一方面基于第一车辆的驾驶路线,和/或基于在线可用的数据库,该数据库具有已经通过该路线的其他车辆的驾驶历史。这种类型的数据库可以包含,例如,有关寒冷条件下狭窄道路的信息。
[0015]
例如,使用车载传感器或通过地图信息或来自导航设备的信息,可以捕获到达瓶颈路段之前的路线。到达瓶颈路段所需的时间由第一车辆的速度和到瓶颈路段的当前距离得出。根据瓶颈路段的长度和预估的速度计算出的通过瓶颈路段的时间。数据会通过修改后的车辆位置和速度不断重新确定。
[0016]
在支路与将要行驶的道路交汇处,优选分别指示到达支路与要行驶的道路的交汇处所需的时间。支路可以在瓶颈路段区域中与要行驶的车道直接连接,或者在要行驶的车道的前面或后面空间与要行驶的车道连接。为此可以制定一个树状布局规划,使得每条支路对应一个分支,在每种分支下都分配了一个时间。在该方法的一个优选实施例中,第二车辆位于支路上,该支路连接第一车辆将要行驶的道路上。
[0017]
在识别和接近瓶颈路段之后,车辆开始将数据传输到网络,该数据与瓶颈路段相关并且与车辆行驶通过瓶颈路段有关。例如,相应的网络可以是5g、lte(long term evolution,长期演进)、车辆到车辆或车辆到基础设施网络。网络处理数据并向瓶颈路段区域中的其他车辆通知第一车辆即将通过瓶颈路段。每种情况下的数据包括:第一车辆到达瓶颈路段的预计时间、第一车辆的当前位置和行驶方向,以及第一车辆离开瓶颈路段的估计时间。
[0018]
为了识别将在瓶颈路段区域中移动的至少一个第二车辆,在第一车辆前方的道路上和在与位于第一车辆前方的道路连接的支路上都采集车辆运动。来自支路的车辆也可能会遇到第一车辆。第一和第二车辆,以及,当然在适当情况下的其他车辆,可以通过上述网络交换与预期行驶方向和计划道路使用的信息,从而可以计算出车辆可以相互相遇的可能位置。如果识别出这种类型的交汇点,车辆可以选择最优速度,以便它们不会在瓶颈路段区域内相互交汇。
[0019]
车辆尤其是多轨机动车辆,例如客车、卡车或公共汽车。路段宽度相应地对应于多轨机动车辆的宽度。该方法也适用于单轨车辆,例如摩托车,因为路段可能不足以容纳多轨车辆和单轨车辆,即,例如,客车和摩托车不能互相超车行驶。
[0020]
优选地,第一车辆或第二车辆被引导到道路区间中道路的更宽的道路区域并停止,并且第二车辆或第一车辆被引导经过停止的车辆。速度是可控的,例如,在遇到较长的瓶颈路段的情况下,第一车辆到达停止地点,从而第二车辆可以以最优速度无延迟地驶过,这样有利地节省时间和燃料。
[0021]
优选地,在该方法中控制被引导过去的车辆的速度,使得停止的车辆在更宽的道路区域中花费的时间最小化。通过这样一种方式控制被引导的车辆的速度,即根据允许的速度和在瓶颈路段区域中可能的速度来选择可能的最大速度。
[0022]
在该方法的一个优选实施例中,路段的宽度由临时障碍物限定。临时障碍物优选地选自群组,该群组包括道路施工、由寒冷条件造成的障碍物和故障车辆。由寒冷条件引起的障碍例如是雪堆、积雪、积冰、冰冻条件等,但不限于此列举。相应的瓶颈路段在时间和空间上是有限的,因此瓶颈路段的存在和消除都可以通过网络进行通信。可以通过车辆传感器识别这种类型的瓶颈路段,该传感器测量道路宽度并将获得的测量值与地图信息进行比较。例如,用于捕捉左右两侧道路边界的摄像头,或可以检测左右两侧冰雪形成的墙壁的超声波传感器,都可以用作车辆传感器。如果车辆传感器捕获的数据与地图信息不匹配,则数据将通过网络传输到评估信息的中央位置。中央位置可以是一个固定的设施,例如,电台,或者,数据也可以通过移动方式处理,例如在车辆上处理。为此,与临时瓶颈路段相关的数据还将与其他车辆的数据进行比较。中央位置为地图信息提供相应的更新,并通知更多在瓶颈路段附近移动并可能很快驶入瓶颈路段的车辆。可以通过例如导航设备来通知车辆。
[0023]
导航系统可以处理变化的路况,例如与通常处理与车辆堵车相关信息的方式相同。因此,与临时瓶颈路段有关的信息也可以被纳入路由算法,以便找到绕过瓶颈路段的最优路线。
[0024]
此外,优选地提供可能的转弯位置或瓶颈路段区域中的可用停车位置。因此,接近瓶颈路段的车辆的信息包括瓶颈路段的位置、瓶颈路段的宽度、在道路的交汇处的转弯道、速度限制等。
[0025]
在该方法的另一优选实施例中,确定车辆速度和选择停车地点的主车辆是在路段区域内移动的多于两辆车辆中选择的。这些车辆实际上根据它们当前的位置排成一列,因此可以预测它们到达瓶颈路段的时间。主车辆确定通过瓶颈路段的最佳策略,并将其传输给所有相关车辆,然后这些车辆必须根据预定速度和停止位置进行调整。有利的是,并非所有车辆都需要相互通信。作为主车辆的替代方案,通过瓶颈路段的指令也可以由基础设施的中央设施发出。
[0026]
该方法优选以自动方式进行。该方法可以由所有形式的自动车辆执行。
[0027]
本发明的第二方面涉及一种具有控制装置的系统,该控制装置被设计为执行根据本发明的方法。该系统的优点对应于根据本发明的方法的优点。
[0028]
本发明的第三方面涉及具有根据本发明的系统的机动车辆。
附图说明
[0029]
参照附图详细解释本发明,其中:
[0030]
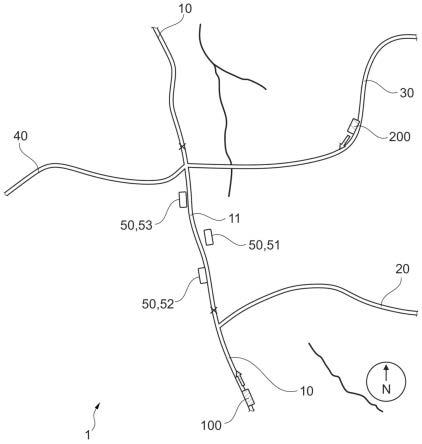
图1示出了具有瓶颈路段的道路的地图,向该地图分配了更高级别的移动无线电网络;
[0031]
图2示出了图1的地图表示,其中,两辆车辆正朝着瓶颈路段的方向移动;
[0032]
图3示出了根据本发明的方法的一个实施例的流程图。
具体实施方式
[0033]
图1示出了路线图1,其上示出了第一道路10的路线。第一道路10是柏油路,地图朝向北方。第一道路10从东边方向与第二道路20连接,在北边与第三道路30连接,并且与第三道路30相对的向西方向与第四道路40连接。该道路具有沥青作为道路覆盖物,道路同义地
称为路。
[0034]
从与第二车道20的交汇处以北到与第三车道30和第四车道40的交汇处以北(在地图1上用十字标记),第一车道10在区域11中设计为单轨车道,它的宽度是这样确定的,即一辆多轨车辆可以畅通无阻地通过,但不能两辆并行通过,即两辆汽车不能相互超越。设计为单轨的道路区域11也称为瓶颈路段11。当地条件(山脉、斜坡地形)仅允许第一道路10的单轨设计。在通常为双轨的道路的情况下,道路施工和/或寒冷条件(雪、冰)可能导致道路变窄,因此只有一条轨道可以行驶。
[0035]
三个更宽的道路区域50存在于与第二道路20的交汇处以北的第一道路10中,以及与第三道路30和第四道路40的交汇处以南的地方。根据图1所示,直接用于避免迎面而来的车辆的停车区域被设计为更宽的道路区域。或者,例如,为故障车辆或公共汽车站提供的紧急停车区域也可以用于车辆的临时停车。第一停车区域51形成于右侧车道,第二停车区域52和第三停车区域53形成在左侧车道。
[0036]
路线图1示出了移动无线电单元60的网络。这些单元可用于监测道路的当前使用情况。移动无线电单元进一步实现了车辆之间的通信和最佳交通流量的评估。相关单元61由虚线表示,非相关单元62由虚线表示。移动无线电网络是5g网络,或者,它也可以是例如lte(long term evolution,长期演进)、车辆到车辆或车辆到基础设施网络。
[0037]
图2示出了在图1所示的路线图1上的有车辆的情况。第一车辆100位于第一道路10的南部区域。由于方法是从第一车辆100的角度进行的,因此第一车辆100也被设计为自我意识车辆。第一车辆100是客车,或者,它也可以是例如卡车或公共汽车。第一车辆100正按照行进箭头方向向瓶颈路段11移动。第二车辆200位于第三道路30上。它正按照行进箭头方向向第一条道路10移动,因此类似地向瓶颈路段11移动。
[0038]
在如图3所示的根据本发明的方法的一个实施例中,在第一方法步骤s1中,第一车辆100通过车载导航装置检测前方路段。瓶颈路段的起点和终点由导航设备作为地图信息输出。第一车辆10以特定速度(70km/h)移动,因此,在第二步骤s2中,可以计算其在瓶颈路段中的移动时间(进入时间,离开时间,假设它没有遇到任何迎面而来的行驶车辆)。在第三步骤s3中,第一车辆100将该数据传输到网络以告知第二车辆200关于第一车辆100对瓶颈路段的计划使用。
[0039]
在第四步骤s4中识别第二车辆200。为此,第一车辆100通过网络60接收与第二车辆200相关的数据,尤其是当前位置、速度、进入瓶颈路段11的时间、离开瓶颈路段11的时间(假设没有遇到任何迎面而来的交通),以及到达第一道路10后的计划行进方向。车辆100、200还可以建立车辆间通信并且可以直接交换上述数据。
[0040]
确定概率,指示在瓶颈路段11内的第一车辆100和第二车辆200在瓶颈路段11内是否会相遇以及在什么位置是可能的。在该示例性实施例中,第二车辆200以70km/h的速度移动并计划向左转向进入第一道路10。因此第一车辆100和第二车辆200很可能会在瓶颈路段11内的停止区域51和停止区域53之间的区域相遇(y表示是,可能会面)。如果第二车辆200向右转弯进入第一车道10或行驶在第四车道40正前方(n代表no,不相会),根据现有的通行权,第一车辆100和第二车辆200的相遇将被确定为立即行驶,该方法将结束。在这种情况下,该方法将在步骤s1开始重启。或者,如果第一车辆100以明显高于第二车辆200的速度(例如90km/h)移动,则两车辆100、200在瓶颈路段11中的相遇也是不可能的,因为当第二车
辆200到达时,第一车辆100已经离开瓶颈路段11。
[0041]
在步骤s5中,为避免针第一车辆100和第二车辆200在瓶颈路段内相遇,对于车辆100、200在每种情况,确定会迫使车辆100、200中的一个倒车的速度。确定第二车辆200在第一车辆100驶过停车区域51后将到达停车区域53。第二车辆200被引导到该停车区域53以便停在那里,第一车辆100以适应瓶颈路段的最优速度超过第二车辆200。在每种情况下,将相应的信息传送给两个车辆100、200中的每一个。这样,车辆100、200在通过瓶颈路段11时损失的时间最少。
[0042]
如果第一车辆100在第二车辆驶过停车区域53之后到达停车区域51,则第一车辆100被引导到停车域区51停车,并允许第二车辆200通过。
[0043]
或者,可以授予道路更高的优先级,例如,授予第一道路10,而非授予第二道路20,据此,来自优先级较低的车道的车辆必须在下一个停车区域停车。在本实施例中,第一车辆100会驶过,而第二车辆200会停在停车区域53,直到第一车辆100驶过。
[0044]
在该方法的另一替代实施例中,如果在瓶颈路段11内没有进行规避动作的可能,则调整潜在碰撞车辆的速度。例如,第一车辆100以允许或可能的最大速度被引导通过瓶颈路段11,并且第二车辆200以相应较慢的速度通过,直到第一车辆100已经通过两辆车辆之间的潜在碰撞区域。
[0045]
在另一种情况中(未示出),存在多于两辆车辆并且在距瓶颈路段11特定距离处移动,即在瓶颈路段11的区域内或朝向它移动。这可以包括住宅区、停车场或休息区的车辆。所有车辆都从第一车辆100接收上述数据,并且它们也传输数据,使得所述数据彼此交换。在最简单的情况下,希望通过瓶颈路段11的车辆根据它们与瓶颈路段11的当前距离和/或它们到达瓶颈路段11的计算时间排成一列,并根据该顺序通过所述瓶颈路段11,从而避免了车辆之间的复杂操作或协商,其中,车辆之间的通信同样是可能的。
[0046]
然而,对于通过瓶颈路段11的所有车辆的最佳控制,考虑在瓶颈路段11内或朝向瓶颈路段11移动的所有车辆是有利的。通信理论已知的方法可以用于此目的。信息单元通过不同方向的信息渠道进行调度。
[0047]
或者,特别是在瓶颈路段11区域内涉及多辆车辆的高度复杂情况的情况下,可以指定主车辆,例如,第一车辆100,其制定通过瓶颈路段11的最佳策略并将该策略传输到所有其他车辆。其他车辆然后遵循来自主车辆的指示。在每种情况下,信息包括瓶颈路段11的位置、车辆到达瓶颈路段11的时间、通过时间、车辆从瓶颈路段11离开的时间、进一步驶向瓶颈路段的车辆、潜在的碰撞点和相应的通过地点,以及到达相应通过地点的最佳速度。所有信息都在不断更新。
[0048]
作为主车辆的替代方案,通过瓶颈路段的最佳顺序也可以由固定服务器计算,该服务器可以存在于,例如,当地基础设施的设施中。然后各个车辆从服务器接收驾驶指令或控制命令,以便以最小的延迟通过瓶颈路段11。
[0049]
第一车辆100以及其他车辆可以自动化,从而至少对于一些车辆,可以以自动方式执行该方法。将相应自动驾驶车辆的自动化程度传达给其他车辆。该信息可以通过车辆中的合适显示器进行传达,例如,通过已经指示地图信息与瓶颈路段11的显示器。
[0050]
附图标记列表
[0051]
1 路线图
[0052]
10 第一道路
[0053]
11 瓶颈路段
[0054]
20 第二道路
[0055]
30 第三道路
[0056]
40 第四道路
[0057]
50 更宽的道路区域
[0058]
51 第一停车区域
[0059]
52 第二停车区域
[0060]
53 第三停车区域
[0061]
60 移动网络
[0062]
61 相关单元
[0063]
62 不相关单元
[0064]
100 第一车辆
[0065]
200 第二车辆
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1