车辆控制的方法、装置、电子设备和车辆与流程
本公开涉及车辆辅助驾驶领域,具体地,涉及一种车辆控制的方法、装置、电子设备和车辆。
背景技术:
1、现有技术中,adas(advanced driver assistance system,高级辅助驾驶系统)可以辅助驾驶员驾驶车辆,在车辆行驶的过程中,随时感应周围的环境,从而预先向驾驶员提醒可能发生的危险,有效增加车辆驾驶的舒适性和安全性。
2、但是当车辆后方连接有拖车时,该系统很难感知到拖车周围的环境,无法为驾驶员提醒可能发生的危险,导致车辆驾驶的难度增加,舒适性和安全性降低。
技术实现思路
1、本公开的目的是提供一种车辆控制的方法、装置、电子设备和车辆。
2、为了实现上述目的,第一方面,本公开提供一种车辆控制的方法,应用于车辆;所述车辆连接有拖车,所述方法包括:
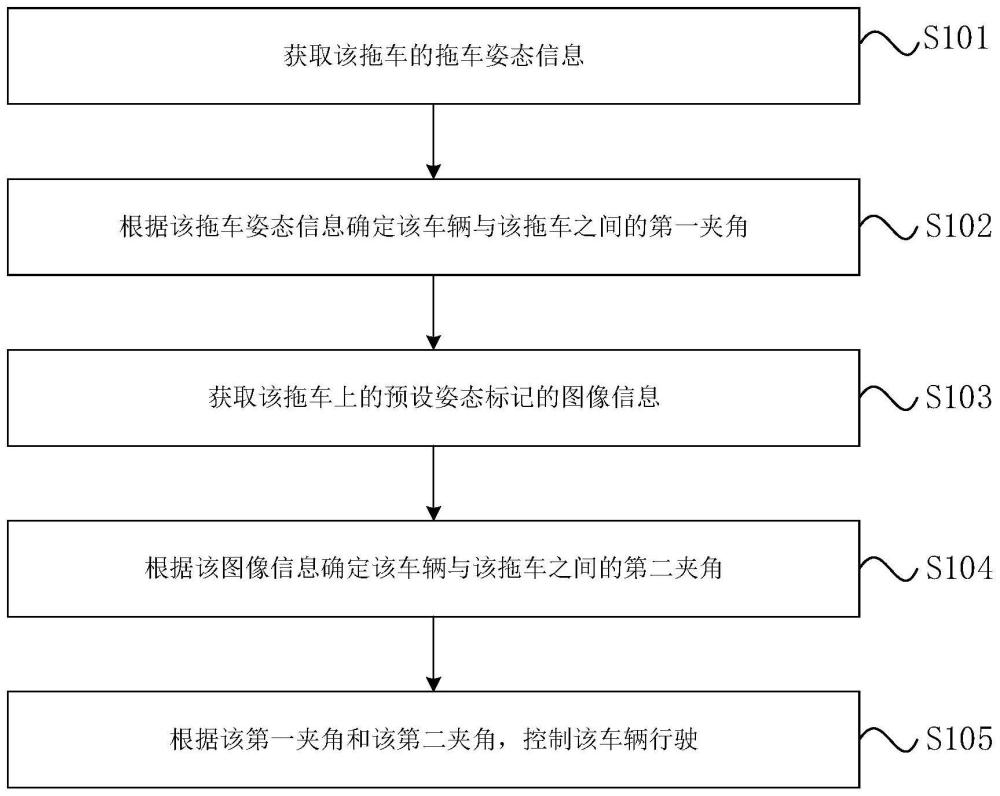
3、获取所述拖车的拖车姿态信息;
4、根据所述拖车姿态信息确定所述车辆与所述拖车之间的第一夹角;
5、获取所述拖车上的预设姿态标记的图像信息,所述预设姿态标记用于表征所述拖车相对所述车辆的姿态变化;
6、根据所述图像信息确定所述车辆与所述拖车之间的第二夹角;
7、根据所述第一夹角和所述第二夹角,控制所述车辆行驶。
8、可选地,所述拖车上设置有陀螺仪,所述获取所述拖车的拖车姿态信息,包括:
9、获取所述陀螺仪发送的所述拖车的拖车姿态信息。
10、可选地,所述根据所述拖车姿态信息确定所述车辆与所述拖车之间的第一夹角,包括:
11、获取所述车辆的横摆角信息和方向盘转角信息;
12、根据所述拖车姿态信息、所述横摆角信息和所述方向盘转角信息确定所述车辆与所述拖车之间的第一夹角。
13、可选地,所述根据所述第一夹角和所述第二夹角,控制所述车辆行驶,包括:
14、将所述第一夹角和所述第二夹角中最小的夹角,作为第一目标夹角;
15、根据所述第一目标夹角控制所述车辆行驶。
16、可选地,所述根据所述第一目标夹角控制所述车辆行驶,包括:
17、在所述第一目标夹角大于或等于预设夹角的持续时间,大于或等于预设时间阈值的情况下,控制所述车辆停止行驶。
18、可选地,所述根据所述第一目标夹角控制所述车辆行驶,包括:
19、在所述车辆的行驶状态为直线倒车状态的情况下,根据所述第一目标夹角控制所述车辆倒车。
20、可选地,所述方法还包括:
21、在所述车辆的行驶状态为非直线倒车状态的情况下,获取所述车辆的驾驶员设置的所述车辆与所述拖车之间的第三夹角;
22、将所述第三夹角和所述第二夹角中的最小夹角,作为第二目标夹角;
23、根据所述第二目标夹角确定目标倒车路径;
24、控制所述车辆按照所述目标倒车路径倒车。
25、第二方面,本公开提供一种车辆控制的装置,所述装置应用于车辆;所述车辆连接有拖车,所述装置包括:
26、第一获取模块,用于获取所述拖车的拖车姿态信息;
27、第一确定模块,用于根据所述拖车姿态信息确定所述车辆与所述拖车之间的第一夹角;
28、第二获取模块,用于获取所述拖车上的预设姿态标记的图像信息,所述预设姿态标记用于表征所述拖车相对所述车辆的姿态变化;
29、第二确定模块,用于根据所述图像信息确定所述车辆与所述拖车之间的第二夹角;
30、第一控制模块,用于根据所述第一夹角和所述第二夹角,控制所述车辆行驶。
31、可选地,所述拖车上设置有陀螺仪,所述装置还包括:
32、第三获取模块,用于获取所述陀螺仪发送的所述拖车的拖车姿态信息。
33、可选地,所述装置还包括:
34、第一夹角计算模块,用于获取所述车辆的横摆角信息和方向盘转角信息;根据所述拖车姿态信息、所述横摆角信息和所述方向盘转角信息确定所述车辆与所述拖车之间的第一夹角。
35、可选地,所述装置还包括:
36、第二控制模块,用于将所述第一夹角和所述第二夹角中最小的夹角,作为第一目标夹角;根据所述第一目标夹角控制所述车辆行驶。
37、可选地,所述装置还包括:
38、车辆停止模块,用于在所述第一目标夹角大于或等于预设夹角的持续时间,大于或等于预设时间阈值的情况下,控制所述车辆停止行驶。
39、可选地,所述装置还包括:
40、直线倒车模块,用于在所述车辆的行驶状态为直线倒车状态的情况下,根据所述第一目标夹角控制所述车辆倒车。
41、可选地,所述装置还包括:
42、非直线倒车模块,用于在所述车辆的行驶状态为非直线倒车状态的情况下,获取所述车辆的驾驶员设置的所述车辆与所述拖车之间的第三夹角;
43、将所述第三夹角和所述第二夹角中的最小夹角,作为第二目标夹角;
44、根据所述第二目标夹角确定目标倒车路径;
45、控制所述车辆按照所述目标倒车路径倒车。
46、第三方面,本公开提供一种非临时性计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述车辆控制方法的步骤。
47、第四方面,本公开提供一种电子设备,包括:
48、存储器,其上存储有计算机程序;
49、处理器,用于执行所述存储器中的所述计算机程序,以实现上述车辆控制方法的步骤。
50、第五方面,本公开提供一种车辆,包括第四方面所述的电子设备。
51、本公开通过获取该拖车的拖车姿态信息;根据该拖车姿态信息确定该车辆与该拖车之间的第一夹角;获取该拖车上的预设姿态标记的图像信息,该预设姿态标记用于表征该拖车相对该车辆的姿态变化;根据该图像信息确定该车辆与该拖车之间的第二夹角;根据该第一夹角和该第二夹角,控制该车辆行驶;通过从陀螺仪中获取的拖车姿态信息得到车辆与拖车之间的夹角,可以辅助驾驶员判断车辆的运行情况,降低了对连接有拖车的车辆的驾驶难度,提高了驾驶过程中的舒适性和安全性。
52、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种车辆控制的方法,其特征在于,应用于车辆;所述车辆连接有拖车,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述拖车上设置有陀螺仪,所述获取所述拖车的拖车姿态信息,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述拖车姿态信息确定所述车辆与所述拖车之间的第一夹角,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述第一夹角和所述第二夹角,控制所述车辆行驶,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述第一目标夹角控制所述车辆行驶,包括:
6.根据权利要求4所述的方法,其特征在于,所述根据所述第一目标夹角控制所述车辆行驶,包括:
7.根据权利要求1至6任一项所述的方法,其特征在于,所述方法还包括:
8.一种车辆控制的装置,其特征在于,应用于车辆;所述车辆连接有拖车,所述装置包括:
9.一种电子设备,其特征在于,包括:
10.一种车辆,其特征在于,包括权利要求9所述的电子设备。
技术总结
本公开涉及一种车辆控制的方法、装置、电子设备和车辆,通过获取该拖车的拖车姿态信息;根据该拖车姿态信息确定该车辆与该拖车之间的第一夹角;获取该拖车上的预设姿态标记的图像信息,该预设姿态标记用于表征该拖车相对该车辆的姿态变化;根据该图像信息确定该车辆与该拖车之间的第二夹角;根据该第一夹角和该第二夹角,控制该车辆行驶;通过从陀螺仪中获取的拖车姿态信息得到车辆与拖车之间的夹角,可以辅助驾驶员判断车辆的运行情况,降低了对连接有拖车的车辆的驾驶难度,提高了驾驶过程中的舒适性和安全性。
技术研发人员:邵华,金大鹏,向海波,赫连晓会,张铁胜,崔延红
受保护的技术使用者:北汽福田汽车股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!