摊铺机辅助驾驶路径跟踪方法及系统、装置、摊铺机与流程
本技术涉及摊铺机,具体而言,涉及一种摊铺机辅助驾驶路径跟踪方法及系统、装置、摊铺机。
背景技术:
1、传统摊铺机作业时,驾驶员需要长时间保持摊铺机的导向杆与路沿(白线或路沿石等)行驶,操作劳动强度大,易发生碰撞风险,且人工驾驶精度难以保证,影响施工质量。
技术实现思路
1、本技术旨在解决或改善上述技术问题。
2、为此,本技术的第一目的在于提供一种摊铺机辅助驾驶路径跟踪方法。
3、本技术的第二目的在于提供一种摊铺机辅助驾驶路径跟踪系统。
4、本技术的第三目的在于提供一种摊铺机辅助驾驶路径跟踪装置。
5、本技术的第四目的在于提供一种可读存储介质。
6、本技术的第五目的在于提供一种摊铺机。
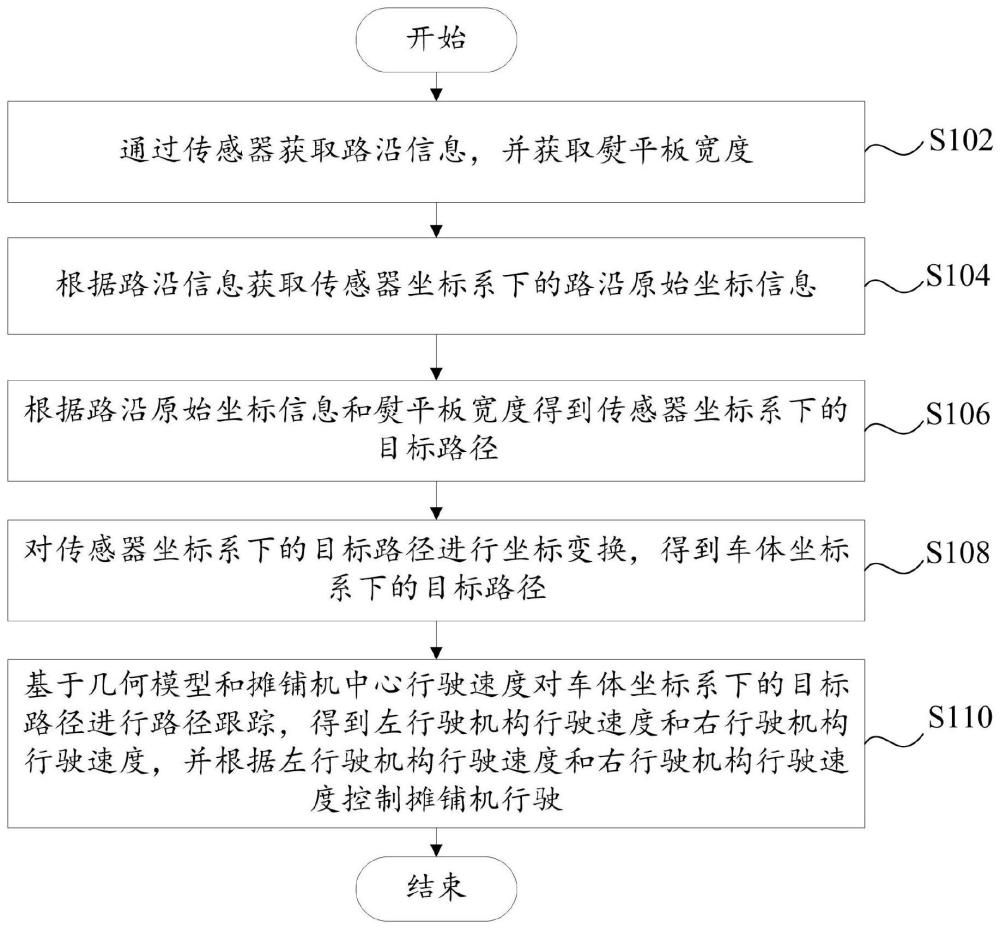
7、为实现本技术的第一目的,本技术第一方面的技术方案提供了一种摊铺机辅助驾驶路径跟踪方法,用于摊铺机,摊铺机包括车体和传感器,摊铺机辅助驾驶路径跟踪方法包括:通过传感器获取路沿信息,并获取熨平板宽度;根据路沿信息获取传感器坐标系下的路沿原始坐标信息;根据路沿原始坐标信息和熨平板宽度得到传感器坐标系下的目标路径;对传感器坐标系下的目标路径进行坐标变换,得到车体坐标系下的目标路径;基于几何模型和摊铺机中心行驶速度对车体坐标系下的目标路径进行路径跟踪,得到左行驶机构行驶速度和右行驶机构行驶速度,并根据左行驶机构行驶速度和右行驶机构行驶速度控制摊铺机行驶。
8、根据本技术提供的摊铺机辅助驾驶路径跟踪方法,首先通过传感器获取路沿信息,并获取熨平板宽度。然后根据路沿信息获取传感器坐标系下的路沿原始坐标信息。根据路沿原始坐标信息和熨平板宽度得到传感器坐标系下的目标路径。然后对传感器坐标系下的目标路径进行坐标变换,得到车体坐标系下的目标路径。最后基于几何模型和摊铺机中心行驶速度对车体坐标系下的目标路径进行路径跟踪,得到左行驶机构行驶速度和右行驶机构行驶速度,并控制摊铺机以左行驶机构行驶速度和右行驶机构行驶速度行驶。基于局部传感器定位,实时计算目标路径,基于几何模型对车体坐标系下的目标路径进行路径跟踪,可以自动适应摊铺宽度,简化施工过程中的操作。且无需架设通讯系统,无需调度中心,成本低廉。
9、另外,本技术提供的技术方案还可以具有如下附加技术特征:
10、在一些技术方案中,可选地,摊铺机辅助驾驶路径跟踪方法还包括:在摊铺宽度发生变化时,根据前视距离获取车体坐标系下的第一目标点坐标;根据传感器与车体相对位置,将第一目标点坐标变换到传感器坐标系下,得到第二目标点坐标;根据路沿信息和第二目标点坐标,得到变化后熨平板宽度。
11、在该技术方案中,摊铺机辅助驾驶路径跟踪方法还包括在摊铺宽度发生变化时,根据前视距离获取车体坐标系下的第一目标点坐标。然后根据传感器与车体相对位置,将第一目标点坐标变换到传感器坐标系下,得到第二目标点坐标。最后根据路沿信息和第二目标点坐标,得到变化后熨平板宽度。当摊铺路面宽度发生变换时,自动计算熨平板宽度,能够简化操作。
12、在一些技术方案中,可选地,传感器坐标系下的目标路径的计算公式为:
13、传感器坐标系下的目标路径的计算公式为:
14、x1=x0+bwh×cos(theta_k+pi/2);
15、y1=y0+bwh×sin(theta_k+pi/2);
16、theta_k=pi/2-theta;
17、其中,(x0,y0)为传感器坐标系下的路沿原始坐标位置,bwh为熨平板宽度,theta为传感器坐标系下坐标y轴与路沿夹角,theta_k为传感器坐标系下坐标x轴与路沿夹角,(x1,y1)为传感器坐标系下目标路径的坐标,pi为圆周率。
18、在该技术方案中,因摊铺机熨平板紧贴路沿行驶,可知摊铺机目标跟踪线是与路沿平行的一条直线。熨平板宽度bwh,可求出摊铺机目标跟踪线在传感器坐标系下的坐标,同时得到路沿平行线上的点(x1,y1)。
19、在一些技术方案中,可选地,车体坐标系下的目标路径的计算公式为:
20、xp1=x1×cosφ0-y1×sinφ0+x0;
21、yp1=y1×sinφ0-y1×cosφ0+y0;
22、theta_p=theta_k+φ0;
23、x2=xp1+(y2-yp1)/tan(theta_p);
24、y2=pe;
25、其中,(x0,y0,φ0)为传感器坐标系相对于车体坐标系的固定偏移,(x1,y1)为传感器坐标系下目标路径的坐标,(xp1,yp1)为车体坐标系下目标路径的坐标,(x2,y2)为目标点,theta_p为目标路径与车体坐标系x轴夹角,pe为前视距离。
26、在该技术方案中,通过坐标变换,将点(x1,y1),变换到车体坐标系下(xp1,yp1)。根据前视距离pe,计算获取车体坐标系下的目标点(x2,y2)。
27、在一些技术方案中,可选地,左行驶机构行驶速度的计算公式为:
28、vl=v(xb/(1+cos(2arctan(y2/x2)))+l/2)/r;
29、右行驶机构行驶速度的计算公式为:
30、vr=v(xb/(1+cos(2arctan(y2/x2)))-l/2)/r;
31、其中,v为摊铺机中心行驶速度,vl为左行驶机构行驶速度,vr为右行驶机构行驶速度,l为摊铺机轴距,(x2,y2)为目标点,xb为目标跟踪点在车体坐标系下x轴的坐标,r是中心点的转弯半径。
32、在该技术方案中,摊铺机几何模型为双轮履带模型,路径跟踪原理:设目标点的坐标为(x2,y2),摊铺机轴距为l,摊铺机中心行驶速度为v,可以分别计算出左、右行驶机构行驶速度v1和vr。
33、为实现本技术的第二目的,本技术第二方面的技术方案提供了一种摊铺机辅助驾驶路径跟踪系统,包括:第一获取模块,用于通过所述传感器获取路沿信息,并获取熨平板宽度;第二获取模块,用于根据所述路沿信息获取传感器坐标系下的路沿原始坐标信息;计算模块,用于根据所述路沿原始坐标信息和所述熨平板宽度得到所述传感器坐标系下的目标路径;变换模块,用于对所述传感器坐标系下的目标路径进行坐标变换,得到车体坐标系下的目标路径;路径跟踪模块,用于基于几何模型和摊铺机中心行驶速度对车体坐标系下的目标路径进行路径跟踪,得到左行驶机构行驶速度和右行驶机构行驶速度,并根据左行驶机构行驶速度和右行驶机构行驶速度控制摊铺机行驶。
34、根据本技术提供的摊铺机辅助驾驶路径跟踪系统,包括第一获取模块、第二获取模块、计算模块、变换模块和路径跟踪模块。其中,第一获取模块,用于通过所述传感器获取路沿信息,并获取熨平板宽度;第二获取模块,用于根据所述路沿信息获取传感器坐标系下的路沿原始坐标信息;计算模块,用于根据所述路沿原始坐标信息和所述熨平板宽度得到所述传感器坐标系下的目标路径;变换模块,用于对所述传感器坐标系下的目标路径进行坐标变换,得到车体坐标系下的目标路径;路径跟踪模块,用于基于几何模型和摊铺机中心行驶速度对车体坐标系下的目标路径进行路径跟踪,得到左行驶机构行驶速度和右行驶机构行驶速度,并根据左行驶机构行驶速度和右行驶机构行驶速度控制摊铺机行驶。基于局部传感器定位,实时计算目标路径,基于几何模型对车体坐标系下的目标路径进行路径跟踪,可以自动适应摊铺宽度,简化施工过程中的操作。且无需架设通讯系统,无需调度中心,成本低廉。
35、为实现本技术的第三目的,本技术第三方面的技术方案提供了一种摊铺机辅助驾驶路径跟踪装置,包括:存储器和处理器,其中,存储器上存储有可在处理器上运行的程序或指令,处理器执行程序或指令时实现第一方面技术方案中任一项的摊铺机辅助驾驶路径跟踪方法,故而具有上述第一方面任一技术方案的技术效果,在此不再赘述。
36、为实现本技术的第四目的,本技术第四方面的技术方案提供了一种可读存储介质,其上存储有程序或指令,程序或指令被处理器执行时实现第一方面技术方案中任一项的摊铺机辅助驾驶路径跟踪方法的步骤,故而具有上述第一方面任一技术方案的技术效果,在此不再赘述。
37、为实现本技术的第五目的,本技术第五方面的技术方案提供了一种摊铺机,摊铺机上设有如上述第二方面任一技术方案的摊铺机辅助驾驶路径跟踪系统或如上述第三方面任一技术方案的摊铺机辅助驾驶路径跟踪装置或如上述第四方面任一技术方案的可读存储介质,故而具有上述第二方面或第三方面或第四方面任一技术方案的技术效果,在此不再赘述。
38、在一些技术方案中,可选地,摊铺机包括双轮履带摊铺机。
39、本技术的附加方面和优点将在下面的描述部分中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!