车辆的制作方法
1.本发明涉及车辆的技术领域。
背景技术:
2.在车辆中,有人提出,当使车轮停止的前后方向的力上升的变化量超过阈值,且使车轮停止的前后方向的力的大小超过预设值时,判定车轮接触到了车挡部件(車止
め
部材)。
3.现有技术文献
4.专利文献1:日本特开2006-96191号公报
技术实现要素:
5.发明所要解决的课题
6.但是,人们希望在车辆中对车轮接触到车挡部件等的台阶(段差)之后的用户操作进行适当的控制。
7.本发明鉴于上述情况而发明的,目的在于对台阶进行反映了用户操作的控制。
8.解决课题的手段
9.本发明一实施方式的车辆具有:台阶检测部,其对台阶进行检测;以及行驶控制部,其并进执行抑制翻越台阶的误进发的台阶翻越抑制控制,和支援翻越台阶的台阶翻越支援控制。
10.由此,在用户有意愿翻越台阶时,车辆可以进行翻越台阶的支援;当用户进行误操作等而没有意愿翻越台阶时,车辆可以进行抑制,以避免翻越台阶。
11.发明效果
12.通过本发明,能够对台阶进行反映了用户操作的控制。
附图说明
13.图1是表示车辆组成的图;
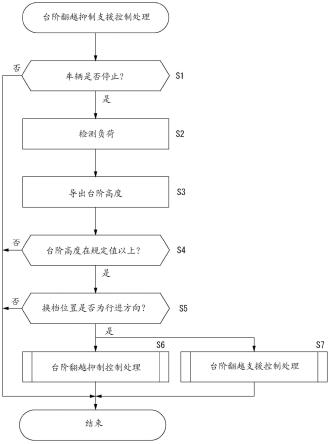
14.图2是表示台阶翻越抑制支援控制处理的流程的流程图;
15.图3是台阶的高度和翻越距离的说明图;
16.图4是表示台阶翻越抑制控制处理的流程的流程图;
17.图5是表示台阶翻越支援控制处理的流程的流程图。
18.符号说明
19.1 车辆
20.2 发动机
21.6 前轮
22.10 后轮
23.11 制动装置
24.12 负荷传感器
25.13 换档传感器
26.14 加速传感器
27.16 障碍物传感器
28.17 控制装置
29.21 台阶高度导出部
30.22 翻越距离导出部
31.23 台阶检测部
32.24 行驶控制部
具体实施方式
33.《1、车辆的组成》
34.图1是表示车辆1的组成的图。需要说明的是,图1中仅在车辆1的组成中选取了一实施方式主要涉及的主要部分的组成进行图示。
35.如图1所示,车辆1具有发动机2、变速器3、前驱动轴4、转换离合器(
トランスファークラッチ
)5、前轮6、传动轴7、差动齿轮8、后驱动轴9、后轮10、制动装置11、负荷传感器12、换档传感器13、加速传感器14、制动传感器15、障碍物传感器16、控制装置17。
36.发动机2是生成用于使汽车1行驶的扭矩的驱动源。发动机2消耗汽油等燃料使输出轴旋转,以此生成扭矩。需要说明的是,车辆1虽然具有发动机2作为驱动源,但也可以具有发动机和电动机作为驱动源,还可以只具有电动机。
37.发动机2的输出轴与变速器3连接。变速器3例如是无级变速器。变速器3的初级侧与发动机2的输出轴连接。另外,变速器3的次级侧与前驱动轴4和转换离合器5连接。
38.变速器3的初级侧输入有从发动机2输出的扭矩。变速器3将输入到初级侧的扭矩转换为按照初级与次级的变速比得到的扭矩,输出到次级侧。
39.前驱动轴4与前轮6连接。也就是说,从发动机2输出的扭矩的一部分传递到前轮6。
40.转换离合器5设置在变速器3的次级与传动轴7之间。传动轴7通过差动齿轮8与后驱动轴9连接。后驱动轴9与后轮10连接。也就是说,转换离合器5设置在发动机2与后轮10之间的扭矩传递路径上。
41.当转换离合器5断开时,变速器3的次级与传动轴7之间切断,从发动机2输出的扭矩不会传递到后轮10。而当转换离合器5闭合时,变速器3的次级与传动轴7之间进行连接,从发动机2输出的部分扭矩传递到后轮10。
42.制动装置11分别设在前轮6和后轮10中,利用供给的液压分别向前轮6和后轮10赋予制动力。
43.负荷传感器12设置在与前轮6和后轮10连接的轮毂中。负荷传感器12例如是二轴的负荷传感器,检测施加在轮毂(前轮6和后轮10)的上下方向和前后方向的负荷。
44.换档传感器13检测未图示的换档杆的位置。换档杆的位置例如设有p档位、n档位、d档位、b档位,换档传感器13检测档位处于这些当中的哪一个。
45.加速传感器14检测未图示的加速踏板的操作量即踏入量。制动传感器15检测未图示的制动踏板的操作量即踏入量。
46.障碍物传感器16分别设置在车辆1的前方侧和后方侧。障碍物传感器16例如是超声波声纳、雷达、摄像头等,检测车辆1的行进方向(前方或后方)的障碍物。
47.控制装置17是包含cpu(centralprocessingunit,中央处理器)、rom(readonlymemory,只读存储器)和ram(randomaccessmemory,随机存储器)的处理器。例如,控制装置17通过将rom或未图示的存储部中存储的程序在ram上展开并执行各种处理(例如后述的台阶翻越抑制支援控制处理),来控制整个车辆1。
48.例如,控制装置17根据加速传感器14检测的加速踏板的踏入量,控制从发动机2输出的扭矩。另外,控制装置17根据制动传感器15检测的制动踏板的踏入量,控制制动装置11的制动力。
49.另外,控制装置17在具体执行后述的台阶翻越抑制支援控制处理时,会作为台阶高度导出部21、翻越距离导出部22、台阶检测部23以及行驶控制部24发挥功能。
50.《2、台阶翻越抑制支援控制处理》
51.下面对台阶翻越抑制支援控制处理进行说明。在此,以后轮10接触到台阶的情况为例进行说明,而前轮6接触到台阶的情况也可同样处理。
52.图2是表示台阶翻越抑制支援控制处理的流程的流程图。如图2所示,在控制装置17执行台阶翻越抑制支援控制处理时,在步骤s1中台阶检测部23判定车辆1是否停止。需要说明的是,关于车辆1是否停止,例如可以根据未图示的速度传感器的检测结果来判定,也可以根据设置在前轮6或后轮10中的未图示的转速传感器的检测结果来判定。
53.如果汽车1未停止(步骤s1中为“否”),则结束台阶翻越抑制支援控制处理。如果车辆1停止(步骤s1中为“是”),则在步骤s2中台阶检测部23获取负荷传感器12检测的上下方向和前后方向的负荷。
54.接着,在步骤s3中台阶高度导出部21根据负荷传感器12检测到的负荷,导出台阶的高度。
55.图3是台阶的高度和翻越距离的说明图。如上所述,负荷传感器12检测上下方向和前后方向的负荷。需要说明的是,以下如图3所示,将负荷传感器12检测的上下方向的负荷记作负荷fz,将负荷传感器12检测的前后方向的负荷记作负荷fx。
56.当后轮10接触到台阶30时,后轮10会受到从与台阶30接触的部位、朝向后轮10的中心的接触负荷fs。另外,后轮10会受到车辆1的车辆重量引起的车辆轴重fg。需要说明的是,将接触负荷fs与前后方向所成的角记作θ。
57.因此,负荷传感器12检测的上下方向的负荷fz是车辆轴重fg和接触负荷fs的上下方向分量的负荷(记作z方向负荷)fsz的和。另外,负荷传感器12检测的前后方向的负荷fx是接触负荷fs的前后方向分量的负荷(记作x方向负荷)fsx。
58.之后,台阶高度导出部21利用下述(1)式,导出台阶30的高度ls。
59.【数1】
60.ls=lt(1-sinθ)
…
(1)
61.需要说明的是,lt是后轮10的半径,是预先存储在rom等中的已知值。另外,所成角θ使用下述(2)式导出。
62.【数2】
63.θ=(fz-fg)/fx
…
(2)
64.回到图2,导出台阶30的高度ls之后,在步骤s4中行驶控制部24判定台阶30的高度ls是否在预设的规定值以上。即,行驶控制部24根据台阶30的高度ls,确定能否执行后述的台阶翻越抑制控制和台阶翻越支援控制。在此,规定值设定为用于检测是否是为了使车辆1停止而设置的、例如轮挡等台阶30的高度。如此,车辆1根据负荷传感器12检测的负荷来检测台阶30,由此能够检测难以利用摄像头或声呐等检测的车辆1正下方的轮挡等台阶30。
65.如果台阶30的高度ls低于规定值(步骤s4中为“否”),即,如果台阶30相比轮挡等足够低,无需进行后述的台阶翻越抑制控制和台阶翻越支援控制,则结束台阶翻越抑制支援控制处理。
66.而如果台阶30的高度ls在规定值以上(步骤s4中为“是”),即,如果台阶30的高度在轮挡等的高度以上,需要进行后述的台阶翻越抑制控制和台阶翻越支援控制,则进入步骤s5进行处理。
67.在步骤s5中行驶控制部24判定换档传感器13检测的换档位置是否为b档位。在此,会判定后轮10是否向翻越台阶30的方向行进。
68.如果换档位置不是b档位(步骤s5中为“否”),则结束台阶翻越抑制支援控制处理。而如果换档位置是b档位(步骤s5中为“是”),则进入步骤s6和步骤s7进行处理。
69.行驶控制部24在步骤s6中进行台阶翻越抑制控制处理,以抑制误使车辆1进发导致后轮10翻越台阶30的翻越误进发;在步骤s7中进行支援翻越台阶30的台阶翻越支援控制处理。即,行驶控制部24并进执行抑制翻越台阶30的误进发的台阶翻越抑制控制,和支援翻越台阶30的台阶翻越支援控制。
70.《3、台阶翻越抑制控制处理》
71.图4是表示台阶翻越抑制控制处理的流程的流程图。如图4所示,当台阶翻越抑制控制处理(台阶翻越抑制控制)开始时,在步骤s11中行驶控制部24通过检测车辆1后方障碍物的障碍物传感器16,判定在车辆1行进方向(后退方向)上是否检测到了障碍物。
72.如果在车辆1的行进方向(后退方向)上未检测到障碍物(步骤s11中为“否”),则进入步骤s13进行处理。如果在车辆1的行进方向(后退方向)上检测到障碍物(步骤s11中为“是”),则在步骤s12中行驶控制部24判定车辆1是否有可能与检测到的障碍物发生碰撞。在此,例如根据障碍物传感器16在检测障碍物的同时检测的与障碍物之间的距离来判定。
73.如果车辆1有可能与障碍物发生碰撞(步骤s12中为“是”),则在步骤s13中行驶控制部24根据加速传感器14检测的踏入量,判定有可能是加速踏板的误操作。在此,例如,根据加速传感器14检测的踏入量的变化量是否在规定量以上,来判定急速踩下加速踏板导致的误操作的可能性。
74.如果结果是有可能是加速踏板的误操作(步骤s13中为“是”),则在步骤s14中行驶控制部24抑制从发动机2输出的扭矩(扭矩抑制开启),结束台阶翻越抑制支援控制处理。由此,车辆1可以在防止违背用户意愿的进发的同时,降低与障碍物发生碰撞的可能性。
75.另一方面,如果车辆1不可能与障碍物发生碰撞(步骤s12中为“否”),以及如果不可能是加速踏板的误操作(步骤s13中为“否”),则即使加速踏板被操作,行驶控制部24也会判定为按照用户意愿翻越台阶30。这种情况下,在步骤s15中行驶控制部24不会抑制从发动机2输出的扭矩(扭矩抑制关闭),结束台阶翻越抑制支援控制处理。由此,车辆1可以处于按照用户意愿翻越台阶30的状态。
76.《4、台阶翻越支援控制处理》
77.图5是表示台阶翻越支援控制处理的流程的流程图。如图5所示,台阶翻越支援控制处理(台阶翻越支援控制)开始后,在步骤s21中行驶控制部24判定用户是否有意愿翻越台阶30。在此,例如,行驶控制部24显示提问是否要翻越台阶30,根据用户对操作部的回答操作,判定用户是否有意愿翻越台阶30。
78.之后,重复步骤s21,直到判定用户有意愿翻越台阶30。如果用户有意愿翻越台阶30(步骤s21中为“是”),则在步骤s22中行驶控制部24根据加速传感器14检测的加速踏板的踏入量,判定加速踏板是否被操作。
79.如果结果是加速踏板未被操作(步骤s22中为“否”),则重复步骤s22,直到加速踏板被操作。另一方面,如果加速踏板被操作(步骤s22中为“是”),则在步骤s23中行驶控制部24计算出用于翻越台阶30的扭矩,从发动机2输出计算出的扭矩。由此,后轮10开始翻越台阶30。
80.之后,在步骤s24中行驶控制部24判定车辆1与台阶30接触后的行驶距离是否大于从翻越距离减去规定的制动距离后的值。在此,翻越距离导出部22在检测到台阶30时利用下述(3)式,将从后轮10的中心到台阶30的最靠后轮10侧的前后方向的距离,即直到翻越台阶30所移动的距离,作为翻越距离l(参考图3)导出。
81.【数3】
[0082][0083]
另外,行驶控制部24根据当前的车速、发动机2的扭矩、制动装置11的各种因素等,导出向制动装置11供给液压后到车辆1停止为止的前后方向的距离,作为制动距离。另外,行驶控制部24例如根据设置在后轮10中的转速传感器的检测结果,以及后轮10的半径lt,导出行驶距离。需要说明的是,行驶距离、翻越距离、制动距离的导出方法不限于此,也可以使用其他方法导出。
[0084]
之后,重复步骤s24,直到行驶距离大于从翻越距离中减去制动距离后的值(步骤s24中为“否”)。
[0085]
另一方面,如果行驶距离大于从翻越距离中减去制动距离后的值(步骤s24中为“是”),则在步骤s25中行驶控制部24开始制动,以使后轮10在翻越台阶30后立即停止。具体而言,行驶控制部24在抑制从发动机2输出的扭矩的同时,向制动装置11供给液压使其发挥制动力。
[0086]
之后,当车辆1停止时,在步骤s26中行驶控制部24进行控制,以保持车辆1停止的状态,结束台阶翻越抑制支援控制处理。由此,车辆1能够在支援翻越台阶30的同时,降低翻越台阶30引起的跑过头(
オーバーラン
)。
[0087]
《5、实施方式的总结》
[0088]
综上所述,实施方式的车辆1具有:台阶检测部23,其对台阶进行检测;以及行驶控制部24,其并进执行抑制翻越台阶的误进发的台阶翻越抑制控制,和支援翻越台阶的台阶翻越支援控制。
[0089]
由此,车辆1能够在用户有意愿翻越台阶30时支援翻越台阶30,在用户进行误操作等而没有意愿翻越台阶30时进行抑制以避免翻越台阶30。
[0090]
因此,车辆1能够对台阶30进行反映用户操作的控制,可以实现安全性的提升以及可用性的提高。
[0091]
另外,车辆1具有:负荷传感器12,其对车轮(前轮6、后轮10)接触到台阶30时的负荷进行检测;以及台阶高度导出部21,其根据负荷传感器12检测到的负荷,导出台阶30的高度,其中,行驶控制部24根据台阶30的高度,确定能否执行台阶翻越抑制控制和前述台阶翻越支援控制。
[0092]
由此,车辆1在台阶30相比轮挡等足够低,无需进行台阶翻越抑制控制和台阶翻越支援控制时,可以不进行这些控制,从而减少处理负担。另外,车辆1可以减少因对足够低的台阶30执行这些处理而对用户造成的异样感。
[0093]
另外,车辆1具有:负荷传感器12,其对车轮接触到台阶30时的负荷进行检测;以及翻越距离导出部22,其根据负荷传感器12检测到的负荷,导出直到翻越台阶30所移动的翻越距离,其中,在台阶翻越支援控制中,当车辆1与台阶30接触后的行驶距离大于从翻越距离中减去规定的制动距离后的值时,行驶控制部24抑制来自驱动源的扭矩,以及进行制动装置的制动升压。
[0094]
由此,车辆1可以降低翻越台阶30引起的跑过头。
[0095]
另外,车辆1具有:障碍物传感器16,其对行进方向的障碍物进行检测;以及加速传感器14,其对加速踏板的踏入量进行检测,其中,在台阶翻越抑制控制中,当检测到障碍物时,以及当踏入量的变化量在规定量以上时,行驶控制部24抑制来自驱动源(发动机2)的扭矩。
[0096]
由此,车辆1可以降低与障碍物发生碰撞的可能性。
[0097]
另外,车辆1具有:换档传感器13,其对换档位置进行检测,其中,当基于换档位置认为车辆1的行进方向是朝向台阶30的方向时,行驶控制部24进行台阶翻越抑制控制和台阶翻越支援控制。
[0098]
由此,当车辆1未驶向台阶30时,车辆1可以不进行这些控制,从而减少处理负担。
[0099]
《6、变形例》
[0100]
以上对本发明的实施方式进行了说明,但本发明不限于上述具体示例,可以采用多种组成。
[0101]
例如,车辆1的台阶翻越抑制控制和台阶翻越支援控制的具体内容可以是上述以外的内容。例如,台阶翻越抑制控制只要抑制翻越台阶30的误进发即可,另外,台阶翻越支援控制只要支援翻越台阶即可。
[0102]
另外,上述实施方式虽然是根据负荷传感器12的检测结果检测台阶30,但例如也可以通过摄像头或雷达等其他方法检测台阶30。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1