车辆控制装置的制作方法
本发明涉及在驾驶员成为了不适于驾驶的不适当状态的情况下执行与车辆的行驶有关的行驶控制的车辆控制装置。
背景技术:
1、以往以来,已知在驾驶员成为了不适当状态的情况下执行行驶控制的车辆控制装置。例如,专利文献1所记载的车辆控制装置(以下称为“现有装置”。)判定驾驶员是否处于高睡意状态(第1状态),判定车辆是否处于长时间行驶状态(第2状态)。现有装置若产生了第1状态和第2状态中的任一状态,则进行用于报知所产生的状态的状态报知,并且,执行行驶控制。此外,在第1状态和第2状态下以不同的方式进行状态报知。
2、现有装置在处于第1状态的情况下进行控制以使得将车辆停止,在处于第2状态的情况下进行控制以使得对车辆进行减速。此外,现有装置既可以在处于第1状态的情况下进行自动行驶,在处于第2状态的情况下进行速度控制以使得车辆当前的速度不超过上限速度,也可以在处于第1状态的情况下进行控制以使得将车辆停止在路肩,在处于第2状态的情况下进行车道变更的控制以使得车辆移动至最靠近路肩的车道。
3、现有技术文献
4、专利文献1:日本特开2021-96696号公报
技术实现思路
1、如上所述,现有装置根据是产生了第1状态、还是产生了第2状态,改变状态报知和行驶控制的方式。但是,根据车辆周围的环境,现有装置有可能无法执行“预先决定根据是第1状态还是第2状态而执行的行驶控制”。
2、于是,本发明人研究了根据车辆周围的环境来决定要执行的行驶控制、并执行该行驶控制的车辆控制装置(以下称为“研究装置”。)。
3、如现有装置那样在第1状态和第2状态下预先决定了报知方式的话,研究装置有可能尽管正在执行相同的行驶控制,但却以不同的报知方式进行状态报知。在这样的情况下,处于车辆外部的人无法确定该车辆正在执行什么样的行驶控制,因此,有可能无法进行适当的行动。
4、本发明是为了应对前述的问题而完成的。即,本发明的目的之一在于提供一种车辆控制装置,其在根据车辆周围的环境来决定要执行的行驶控制的车辆控制装置中,对于处于车辆外部的人来说容易确定车辆所执行的行驶控制,提高处于车辆外部的人能够进行适当的行动的可能性。
5、本发明的车辆控制装置(以下也称为“本发明装置”。)具备:
6、控制单元(20、30、40、50),其在车辆的驾驶员成为了不适于驾驶的不适当状态的情况下,执行与所述车辆的行驶有关的行驶控制;和
7、报知装置(66、72、74),其在执行所述行驶控制的情况下,进行用于向所述车辆的周边通知所述行驶控制的执行的周边报知,
8、所述控制单元构成为能够从车道内停止控制、路肩停止控制以及自动行驶控制中执行至少两个行驶控制,
9、所述车道内停止控制使所述车辆停止在所述车辆行驶的行驶车道中,
10、所述路肩停止控制使所述车辆停止在包括所述行驶车道的道路的路肩,
11、所述自动行驶控制使所述车辆自动地行驶到预定的目的地,
12、所述控制单元构成为:
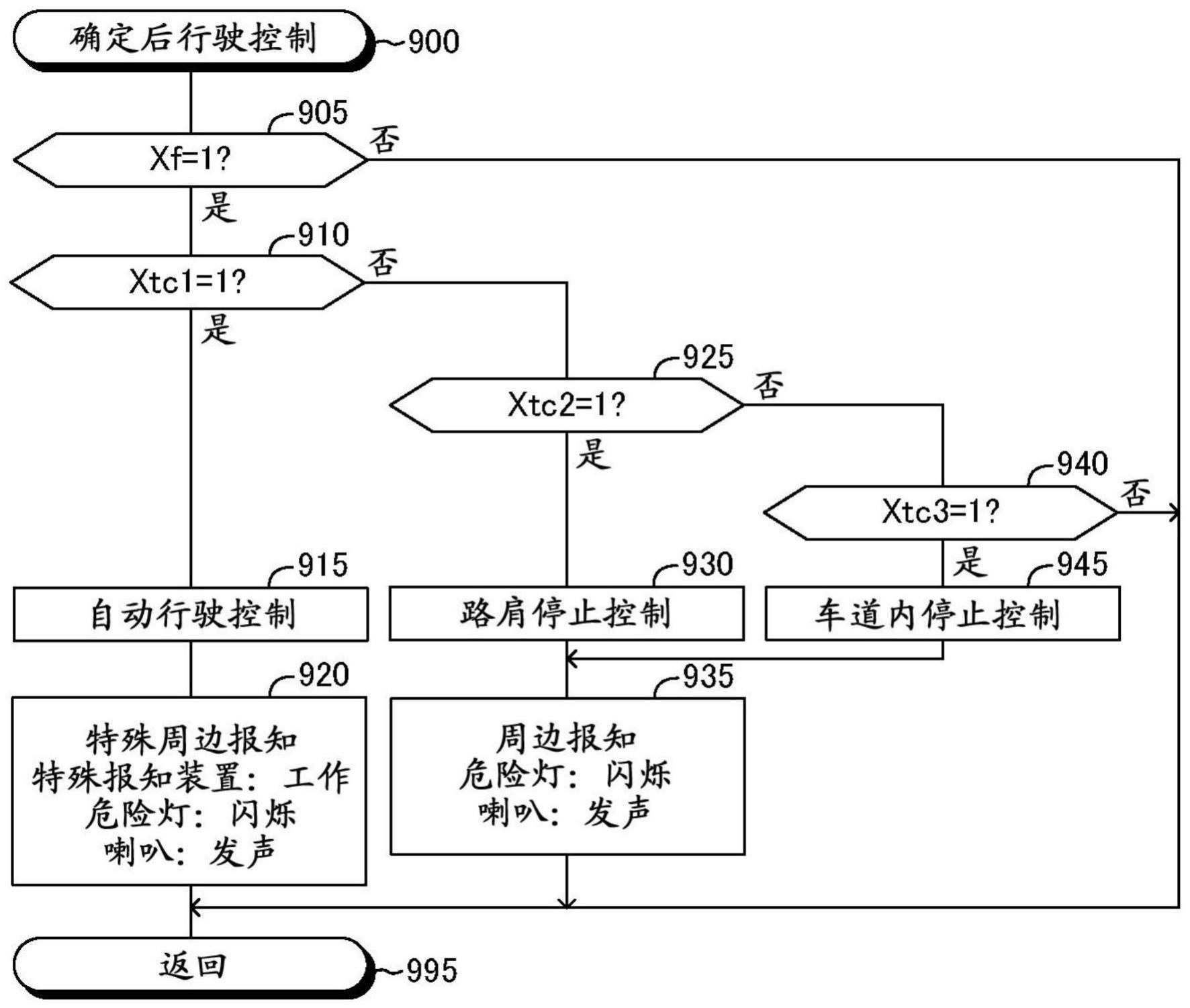
13、在所述驾驶员成为了所述不适当状态的情况下,基于所述车辆周围的环境,从所述行驶控制中执行一个行驶控制(步骤545、步骤600~步骤695、步骤915、步骤930、步骤945),
14、使所述报知装置以根据所述执行的行驶控制而不同的方式进行所述周边报知(步骤920、步骤935)。
15、根据本发明装置,以根据执行的行驶控制而不同的方式进行周边报知,因此,对于处于车辆外部的人来说,容易确定车辆正在执行的行驶控制。由此,能够提高处于车辆外部的人能进行对于行驶控制来说适当的行动的可能性。
16、在本发明装置的一个技术方案中,
17、所述控制单元构成为能够执行所述路肩停止控制和所述自动行驶控制中的至少一方,
18、所述控制单元构成为:在执行所述路肩停止控制和所述自动行驶控制中的任一控制的情况下,在通过所述车辆对前进道路进行变更而所述车辆脱离所述行驶车道之前,开始所述周边报知(步骤820、步骤845)。
19、根据本技术方案,在车辆脱离行驶车道之前开始周边报知,因此,能够对处于车辆外部的人切实地报知车辆要脱离行驶车道的可能性。
20、在本发明装置的一个技术方案中,
21、所述控制单元构成为能够执行所述自动行驶控制,
22、并且,所述控制单元构成为能够执行所述车道内停止控制和所述路肩停止控制中的至少一方,
23、所述报知装置包括进行执行所述自动行驶控制的情况下的所述周边报知的特殊报知装置(74),
24、所述控制单元构成为:通过在执行所述自动行驶控制的情况下使所述特殊报知装置进行所述周边报知(步骤920),从而使执行所述自动行驶控制的情况下的所述周边报知的方式与执行所述车道内停止控制或者所述路肩停止控制的情况下的所述周边报知的方式不同。
25、当执行车道内停止控制和路肩停止控制时,车辆会为了停止而进行减速,但在执行自动行驶控制时,车辆未必会减速。因此,其他车辆(后续车)对正在执行自动行驶控制的车辆进行超车有可能是不适当的。根据本技术方案,在执行自动行驶控制的情况下,与执行车道内停止控制或者路肩停止控制的情况不同,特殊周边报知装置进行周边报知。因此,能够提高处于车辆周围的人能确定正在执行自动行驶控制这一状况的可能性。因此,能够提高对于车辆的行驶进行适当的行动的可能性。
26、本发明的车辆控制装置具备:
27、控制单元(20、30、40、50),其在车辆的驾驶员成为了不适于驾驶的不适当状态的情况下,执行与所述车辆的行驶有关的行驶控制;和
28、报知装置(66、72、74),其在执行所述行驶控制的情况下,进行用于向所述车辆的周边通知所述行驶控制的执行的周边报知,
29、所述控制单元构成为:
30、在所述驾驶员成为了所述不适当状态的情况下,基于所述车辆周围的环境,从车道内停止控制、路肩停止控制以及自动行驶控制中执行一个行驶控制(步骤545、步骤600~步骤695、步骤915、步骤930、步骤945),
31、使执行所述自动行驶控制的情况下的所述周边报知的方式与执行所述车道内停止控制或者所述路肩停止控制的情况下的所述周边报知的方式不同(步骤920、步骤935),
32、所述车道内停止控制使所述车辆停止在所述车辆行驶的行驶车道中,
33、所述路肩停止控制使所述车辆停止在包括所述行驶车道的道路的路肩,
34、所述自动行驶控制使所述车辆自动地行驶到预定的目的地。
35、执行自动行驶控制的情况下的所述周边报知的方式与执行车道内停止控制或者路肩停止控制的情况下的周边报知的方式不同,因此,能够提高处于车辆周围的人能确定正在执行自动行驶控制这一状况的可能性。因此,能够提高对于车辆的行驶进行适当的行动的可能性。
36、此外,在上述说明中,为了有助于理解发明,用括号对与后述的实施方式对应的发明的构成添加了在该实施方式中使用了的名称以及/或者标号。然而,发明的各构成要素并不限定于由所述名称以及/或者标号规定的实施方式。本发明的其他目的、其他特征以及附带的优点将根据参照以下的附图来记述的关于本发明的实施方式的说明来容易地进行理解。
- 还没有人留言评论。精彩留言会获得点赞!