多功能八轮物流车的制作方法
多功能八轮物流车
【技术领域】
1.本实用新型涉及无人驾驶物流设备的技术领域,具体是一种多功能八轮物流车。
背景技术:
2.随着物流运输设备的不断发展,在越来越多的特定区域,采用专用的物流运输设备来代替人工的物流运输手段成为了现今的发展趋势。其中,在深山等无人值守的区域内,由于地势环境恶劣,一般会采用四轮的小型物流车来代替人力进行物流运输作业,但该物流车的载重能力有限,不足以运载达到吨级的重物。因此,需要一种无人驾驶的大型物流车,应用于对达到吨级的重物在复杂环境区域内的物流运输作业。
技术实现要素:
3.本实用新型的目的在于提供一种多功能八轮物流车,解决小型物流车载重能力限制大的问题。
4.本实用新型提供技术方案如下:多功能八轮物流车,包括车主体,其包括底盘模块以及覆盖于所述底盘模块上侧的上壳模块,所述底盘模块包括设于底部的主动轮组和从动轮组,所述底盘模块内部还设有连接所述主动轮组和所述从动轮组的轮轴的传动链条组,所述上壳模块还设有水平设置的载物板。
5.如上所述的多功能八轮物流车,所述主动轮组包括左主动前轮、左主动后轮、右主动前轮、右主动后轮,所述从动轮组包括左从动前轮、左从动后轮、右从动前轮、右从动后轮,所述传动链条组包括左前链条、左后链条、右前链条、右后链条,所述左前链条连接所述左主动前轮与所述左从动前轮的轮轴,所述左后链条连接所述左主动后轮与所述左从动后轮的轮轴,所述右前链条连接所述右主动前轮与所述右从动前轮的轮轴,所述右后链条连接所述右主动后轮与所述右从动后轮的轮轴。
6.如上所述的多功能八轮物流车,所述传动链条组还包括左中链条和右中链条,所述左中链条连接所述左从动前轮与所述左从动后轮的轮轴,所述右中链条连接所述右从动前轮与所述右从动后轮的轮轴。
7.如上所述的多功能八轮物流车,所述底盘模块还包括四个分别与所述主动轮组的轮轴一一对应连接的电机。
8.如上所述的多功能八轮物流车,所述上壳模块还设有云台以及多个摄像头,所述云台设于所述上壳模块的前端,所述摄像头分布于所述上壳模块对应于所述底盘模块的前侧、后侧、左侧、右侧设置。
9.如上所述的多功能八轮物流车,所述底盘模块的前后侧设有多个牵引扣。
10.如上所述的多功能八轮物流车,所述上壳模块上设有多个感知元件,所述底盘模块与所述上壳模块之间设有工控机、行车电脑以及驱动器,所述感知元件电连接于所述工控机和所述行车电脑,所述工控机和所述行车电脑电连接于所述驱动器,所述驱动器包括位于所述底盘模块前侧的前驱动器、位于所述底盘模块后侧的后驱动器,所述前驱动器用
于分别驱动所述电机带动所述左主动前轮、右主动前轮的旋转,所述后驱动器用于分别驱动所述电机带动所述左主动后轮、右主动后轮的旋转。
11.如上所述的多功能八轮物流车,所述感知元件至少包括多组雷达,所述雷达包括毫米波雷达和激光雷达,所述毫米波雷达分布设置于所述上壳模块对应于所述底盘模块的左前角、左后角、右前角、右后角处,所述激光雷达设于所述上壳模块的前端。
12.如上所述的多功能八轮物流车,所述底盘模块与所述上壳模块之间还设有电连接于所述工控机和行车电脑的通信元件,所述通信元件包括工业网络交换机、can通信控制盒以及延伸至外界的信号收发端。
13.如上所述的多功能八轮物流车,所述底盘模块内设有可拆卸的电池箱以及电气控制器,所述电池箱内设有供电电芯,所述供电电芯与所述电气控制器电连接,所述电气控制器至少电连接于所述感知元件、工控机、行车电脑、驱动器、通信元件、电机,所述上壳模块的前端设有与所述供电电芯电连接的充电口,所述充电口位于所述右主动前轮的上侧。
14.与现有技术相比,本实用新型有以下优点:
15.本实用新型采用设置在主动轮组和从动轮组之间的传动链条组,实现以四驱的方式来驱动八轮的转动,提高了物流车在行驶中的稳定性,并具有足够的载重能力来运输吨级的重物,配合载物板的载重功能,使物流车能安全高效地进行自动运输作业。
【附图说明】
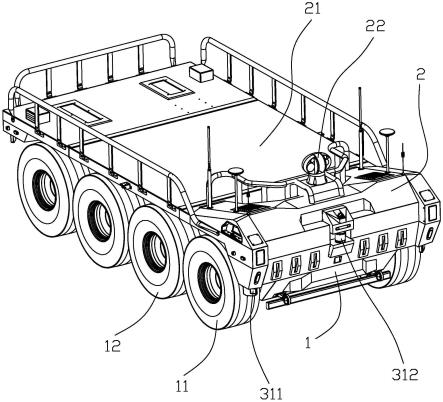
16.图1为本实用新型的立体图。
17.图2为本实用新型中的元件运行关系示意图。
18.图3为本实用新型的内部结构示意图。
19.图4为本实用新型底盘模块中车轮传动关系的俯视示意图。
20.图5为本实用新型的立体图及局部放大图。
21.图6为本实用新型另一角度的立体图。
【具体实施方式】
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型的保护范围。
23.实施例1:请参阅附图1至附图6,本实施例提供一种多功能八轮物流车,包括底盘模块1以及覆盖于底盘模块1上侧的上壳模块2,上壳模块2上设有多个感知元件3,底盘模块1与上壳模块2之间设有工控机4、行车电脑5以及驱动器6,底盘模块1包括主动轮组11和从动轮组12,底盘模块1内部还设有连接主动轮组11和从动轮组12的轮轴的传动链条组13,感知元件3电连接于工控机4和行车电脑5,用于将感知元件3探测的外界环境信息转换为电信号传输给工控机4和行车电脑5,工控机4和行车电脑5电连接于驱动器6且能将感知元件3提供的电信号转换为相应的驱动信号传输给驱动器6,使驱动器6驱动主动轮组11带动从动轮组12转动以带动整车做相应的移动运动,上壳模块2还设有水平设置的载物板21。工控机3和行车电脑4能对感知元件3所收集的信号进行处理,再对驱动器6发出相应的驱动指令,使
驱动器6驱动主动轮组11进行转动,再通过传动链条组13的传动带动从动轮组12转动,使物流车运动,具体为前进、后退、差速转向、制动急停等行驶动作,在配合载物板21的载重功能,使物流车能达到自动行驶运输的效果,既安全可靠,又提高了运输的效率,同时传动链条组13的设置使物流车以四驱的方式实现八轮的转动,提高了物流车在行驶中的稳定性,并具有足够的载重能力来运输吨级的重物。
24.感知元件3至少包括多组雷达31,雷达31包括毫米波雷达311和激光雷达312,毫米波雷达311分布设置于上壳模块2对应于底盘模块1的左前角、左后角、右前角、右后角处,激光雷达312设于上壳模块2的前端。其中,毫米波雷达311的最大探测距离达到1公里,而激光雷达312只有300米;但毫米波雷达311的识别能力一般,穿透能力强,不容易受天气环境影响,而激光雷达312的精度高,穿透性较差,容易受到浓雾、雨雪天气影响,故同时采用毫米波雷达311和激光雷达312来探测障碍物的距离、角度等数据信息。优选的是,感知元件3还包括gps和imu,gps用于记录反馈物流车所处的世界坐标;imu为惯性测量单元,用于实时测量反馈车体的三轴姿态以及速度,便于技术人员实时了解车体的运动姿态是否正常。
25.底盘模块1与上壳模块2之间还设有电连接于工控机4和行车电脑5的通信元件7,通信元件7包括工业网络交换机71、can通信控制盒72以及延伸至外界的信号收发端73。当切换为手动遥控模式时,遥控器发出的指令在工控机4和行车电脑5中的优先级是最高的,遥控器发送的信号会有通信元件7接收,再输送给工控机4和行车电脑5,再通过驱动器6驱动主动轮组11做相应的转动,达到对物流车的手动操控效果。
26.主动轮组11包括左主动前轮111、左主动后轮112、右主动前轮113、右主动后轮114,从动轮组12包括左从动前轮121、左从动后轮122、右从动前轮123、右从动后轮124,传动链条组13包括左前链条131、左后链条132、右前链条133、右后链条134,左前链条131连接左主动前轮111与左从动前轮121的轮轴,左后链条132连接左主动后轮112与左从动后轮122的轮轴,右前链条133连接右主动前轮113与右从动前轮123的轮轴,右后链条134连接右主动后轮114与右从动后轮124的轮轴。通过对八轮中的四个主动轮组11进行独立的驱动,再带动四个从动轮组12的旋转,实现八轮的转动来使物流车行驶并进行运输作业,八轮的设计能极大程度地提升物流车的载重性能,使物流车能达到约2.5吨的载重性能。
27.进一步地,传动链条组13还包括左中链条135和右中链条136,左中链条135连接左从动前轮121与左从动后轮122的轮轴,右中链条136连接右从动前轮123与右从动后轮124的轮轴。左中链条135和右中链条136的设置,能使在同一排的车轮12的转速一致,更利于物流车的差速转向动作的完成,
28.底盘模块1还包括四个分别与主动轮组11的轮轴一一对应连接的电机14,驱动器6包括位于底盘模块1前侧的前驱动器61、位于底盘模块1后侧的后驱动器62,前驱动器61用于分别驱动电机14带动左主动前轮111、右主动前轮113的旋转,后驱动器62用于分别驱动电机14带动左主动后轮112、右主动后轮114的旋转。采用前、后的两组驱动器6的设置,分担了各驱动器6的工作负担,使物流车更具耐用性。
29.底盘模块1内设有可拆卸的电池箱15以及电气控制器8,电池箱15内设有供电电芯151,供电电芯151与电气控制器8电连接,电气控制器8至少电连接于感知元件3、工控机4、行车电脑5、驱动器6、通信元件7、电机14。供电电芯151为大容量的蓄电池,电气控制器8能调整从供电电芯151输出的电压,为感知元件3、工控机4、行车电脑5、驱动器6、通信元件7、
电机14等元件进行分流供电。
30.上壳模块2的前端设有与供电电芯151电连接的充电口152,充电口152位于右主动前轮113的上侧。当需要给物流车进行充电时,在充电口152中接入外接电缆,即可开始充电。
31.上壳模块2还设有云台22以及多个摄像头23,云台22设于上壳模块2的前端,摄像头23分布于上壳模块2对应于底盘模块1的前侧、后侧、左侧、右侧设置。云台22和摄像头23能远程为工作人员传送实时影像,使工作人员清楚地了解物流车所处的环境状态。
32.底盘单元1的前后侧设有多个牵引扣16。除了实现运输货物的功能外,物流车还能作为牵引车使用,具有丰富广泛的用途。
33.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1