基于V2V和定位的电动观光车编队运行控制系统及方法与流程
本发明涉及无人驾驶领域,具体是基于v2v和定位的电动观光车编队运行控制系统及方法。
背景技术:
1、随着无人驾驶汽车技术的不断进步和产品的不断推陈出新,在全封闭、半封闭的特定场景下的无人驾驶车辆的应用越来越多,但是基于多车协同编队行驶的智能驾驶方面实际应用几乎空白,仅有的部分关于多车协同编队的控制方法又是采取领航车行驶轨迹实时采集跟随车自主驾驶预瞄循迹的方法,自主驾驶的跟随车无法做到与领航车同步行驶,且形成无硬连接的短间距的“小火车”编队,若跟随车与领航车间距过大时极易出现车队被干扰强行被其他车辆插队的情况,导致车辆编队混乱的情况,且自主驾驶的跟随车对环境感知要求较高,需装备的自动驾驶硬件成本高昂与车辆编队降低成本的初衷背道而驰;同时目前在景区等人员密集场景中,自动驾驶技术尚不足以支持保障在无监督的情况下实现高效安全的运营;编队运行易于实现、车辆新增设备成本低、运营效率高、无需复杂改装,在人流峰谷差较大的应用场景下,能够灵活编组,满足运力的同时无需增加人力成本,且目前暂无实际应用于场景中的车辆编队产品。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供基于v2v和定位的电动观光车编队运行控制方法,包括如下步骤:
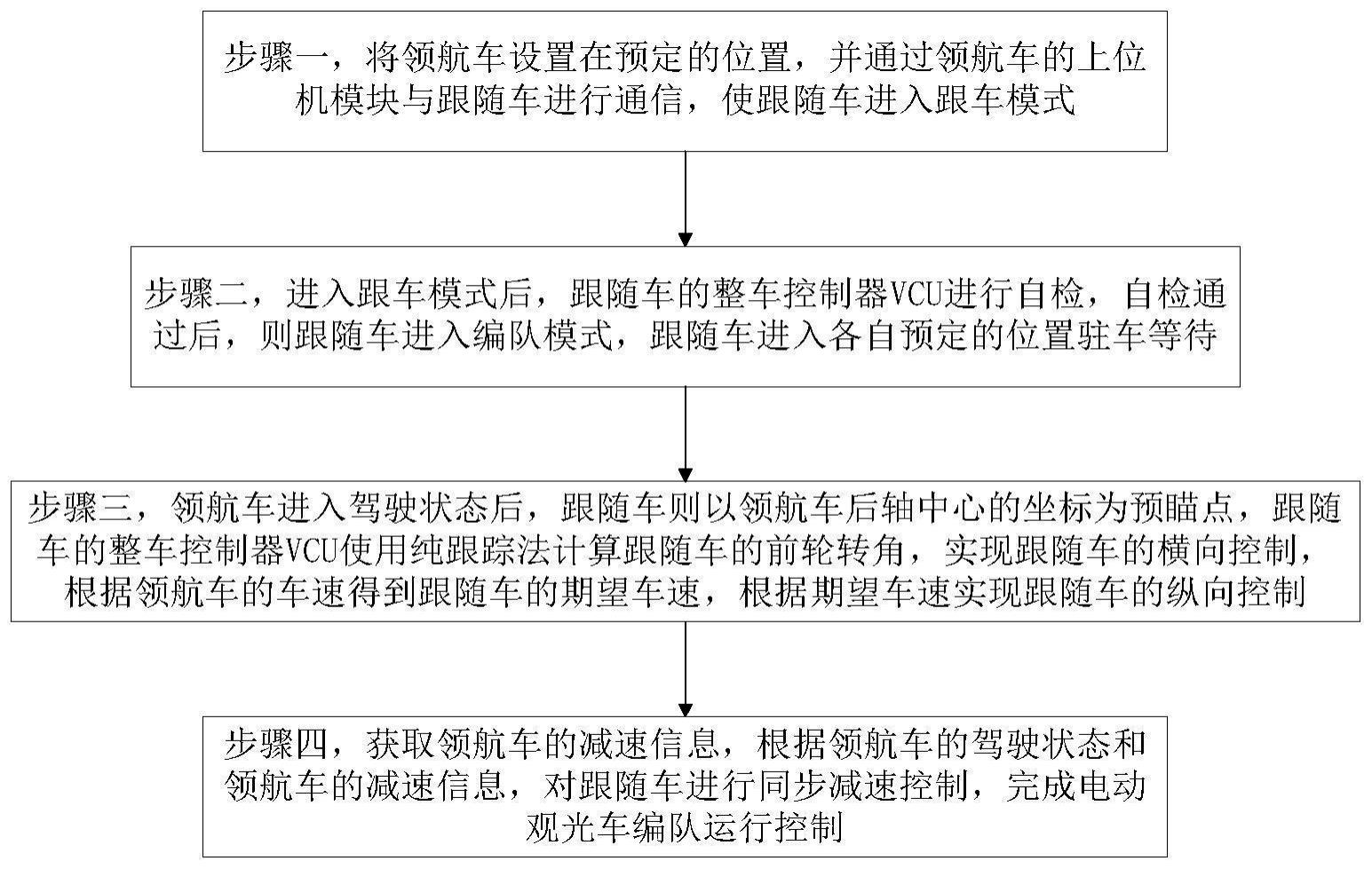
2、步骤一,将领航车设置在预定的位置,并通过领航车的上位机模块与跟随车进行通信,使跟随车进入跟车模式;
3、步骤二,进入跟车模式后,跟随车的整车控制器vcu进行自检,自检通过后,则跟随车进入编队模式,跟随车进入各自预定的位置驻车等待;
4、步骤三,领航车进入驾驶状态后,跟随车则以领航车后轴中心的坐标为预瞄点,跟随车的整车控制器vcu使用纯跟踪法计算跟随车的前轮转角,实现跟随车的横向控制,根据领航车的车速得到跟随车的期望车速,根据期望车速实现跟随车的纵向控制;
5、步骤四,获取领航车的减速信息,根据领航车的驾驶状态和领航车的减速信息,对跟随车进行同步减速控制,完成电动观光车编队运行控制。
6、进一步的,所述的将领航车设置在预定的位置,包括:将领航车停放到跟随车正前方间距大于跟目标间距的位置。
7、进一步的,所述的跟随车的整车控制器vcu进行自检,包括若整车控制器vcu所在跟随车的线控转向、制动、电机的报文无丢帧且状态反馈无故障,并且领航车透传的报文信息无丢帧且内容有效,则自检通过。
8、进一步的,所述的跟随车进入各自预定的位置驻车等待,包括:获取相邻两车的反馈间距,根据相邻两车的目标间距和反馈间距偏差作为控制输入,得到移动车速,若移动车速小于设定的移动车速阈值,则跟随车的速度为得到的移动车速;若移动车速不小于设定的移动车速阈值,则跟随车的速度为移动车速阈值。
9、进一步的,所述的驾驶状态包括自动驾驶状态或手动驾驶状态。
10、进一步的,所述的跟随车则以领航车后轴中心的坐标为预瞄点,跟随车的整车控制器vcu使用纯跟踪法计算跟随车的前轮转角,实现跟随车的横向控制,包括:
11、设定预瞄距离为len_ahead,瞬时转向半径为r,根据正弦定理可得:
12、
13、根据三角函数公式,进一步化简:
14、
15、前轮转角和转向半径r、车辆轴距l的关系:
16、δf=arctan(l/r)
17、可得所需前轮转角:
18、
19、θ为当前车身姿态与目标路径点的夹角。
20、进一步的,所述的根据领航车的车速得到跟随车的期望车速,根据期望车速实现跟随车的纵向控制,包括:
21、将跟随车与领航车实时车速偏差spd_err和跟随车与领航车实时间距偏差dis_err进行融合作为车距保持的闭环控制输入,使用前馈自适应pid算法计算出相对领航车辆的车速增益系数kv,由领航车实时车速vf和车速增益kv+1的点积得到跟随车的期望车速v_target,将期望车速v_target与跟随车的实时车速v_real-time的偏差spd_err作为跟随车的速度闭环控制的输入,使用前馈自适应pid算法计算出跟随车的实时请求扭矩值,实现跟随车的纵向扭矩控制。
22、进一步的,所述的获取领航车的减速信息,根据领航车的驾驶状态和领航车的减速信息,对跟随车进行同步减速控制,包括:
23、当领航车手动驾驶时,跟随车读取领航车刹车踏板信号和反馈的制动压力,跟随车的线控制动压力请求在领航车的反馈制动压力值的基础上进行线性补偿,跟随车的期望速度在制动压力低于设定压力时,按照步骤三,得到跟随车期望速度,当大于设定压力后,跟随车的期望速度将置0;
24、当领航车自动驾驶时,跟随车的期望速度和制动压力,同步领航车的速度和制动压力。
25、基于v2v和定位的电动观光车编队运行控制系统,包括整车控制器vcu、定位模块、无线通信模块和跟随车控制模块;所述的定位模块、无线通信模块分别与所述的整车控制器vcu连接;所述的跟随车控制模块与所述的无线通信模块连接。
26、优选的,所述的跟随车控制模块包括跟随车整车控制器vcu、无线通信装置、跟随车定位装置、超声波模块;所述的线通信装置、跟随车定位装置、超声波模块分别与所述的跟随车整车控制器vcu连接;所述的无线通信装置与所述的无线通信模块连接。
27、本发明的有益效果是:通过领航车的高精定位信息和车辆状态信息,跟随车辆即可实现编队跟随行驶,领航车无需限定于是自动驾驶、远程驾驶或是有人驾驶且多模式可以无缝切换,跟随车辆不受影响,可拓展性强,应用广。
28、本方案对车辆新增设备成本低,利用车辆自有的vcu控制器设计上述的控制方法,即可实现编队行驶,改装成本低且便捷,只需加装高精定位模块和无线通信模块即可,无需更改原车线束,易于批量实现。
技术特征:
1.基于v2v和定位的电动观光车编队运行控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于v2v和定位的电动观光车编队运行控制方法,其特征在于,所述的将领航车设置在预定的位置,包括:将领航车停放到跟随车正前方间距大于跟目标间距的位置。
3.根据权利要求1所述的基于v2v和定位的电动观光车编队运行控制方法,其特征在于,所述的跟随车的整车控制器vcu进行自检,包括若整车控制器vcu所在跟随车的线控转向、制动、电机的报文无丢帧且状态反馈无故障,并且领航车透传的报文信息无丢帧且内容有效,则自检通过。
4.根据权利要求1所述的基于v2v和定位的电动观光车编队运行控制方法,其特征在于,所述的跟随车进入各自预定的位置驻车等待,包括:获取相邻两车的反馈间距,根据相邻两车的目标间距和反馈间距偏差作为控制输入,得到移动车速,若移动车速小于设定的移动车速阈值,则跟随车的速度为得到的移动车速;若移动车速不小于设定的移动车速阈值,则跟随车的速度为移动车速阈值。
5.根据权利要求1所述的基于v2v和定位的电动观光车编队运行控制方法,其特征在于,所述的驾驶状态包括自动驾驶状态或手动驾驶状态。
6.根据权利要求5所述的基于v2v和定位的电动观光车编队运行控制方法,其特征在于,所述的跟随车则以领航车后轴中心的坐标为预瞄点,跟随车的整车控制器vcu使用纯跟踪法计算跟随车的前轮转角,实现跟随车的横向控制,包括:
7.根据权利要求5所述的基于v2v和定位的电动观光车编队运行控制方法,其特征在于,所述的根据领航车的车速得到跟随车的期望车速,根据期望车速实现跟随车的纵向控制,包括:
8.根据权利要求5所述的基于v2v和定位的电动观光车编队运行控制方法,其特征在于,所述的获取领航车的减速信息,根据领航车的驾驶状态和领航车的减速信息,对跟随车进行同步减速控制,包括:
9.基于v2v和定位的电动观光车编队运行控制系统,其特征在于,包括整车控制器vcu、定位模块、无线通信模块和跟随车控制模块;所述的定位模块、无线通信模块分别与所述的整车控制器vcu连接;所述的跟随车控制模块与所述的无线通信模块连接。
10.根据权利要求9所述的基于v2v和定位的电动观光车编队运行控制系统,其特征在于,所述的跟随车控制模块包括跟随车整车控制器vcu、无线通信装置、跟随车定位装置、超声波模块;所述的线通信装置、跟随车定位装置、超声波模块分别与所述的跟随车整车控制器vcu连接;所述的无线通信装置与所述的无线通信模块连接。
技术总结
本发明公开了基于V2V和定位的电动观光车编队运行控制方法,包括:将领航车设置在预定的位置,并通过领航车的上位机模块与跟随车进行通信,使跟随车进入跟车模式;进入跟车模式后,跟随车的整车控制器VCU进行自检,自检通过后,则跟随车进入编队模式,跟随车进入各自预定的位置驻车等待;领航车进入驾驶状态后,跟随车则以领航车后轴中心的坐标为预瞄点,跟随车的整车控制器VCU使用跟踪法计算跟随车的前轮转角,实现跟随车的横向控制,使用前馈自适应PID算法计算出跟随车的实时请求扭矩值,从而实现跟随车的纵向扭矩控制;获取领航车的减速信息,根据领航车的驾驶状态和领航车的减速信息,对跟随车进行同步减速控制,完成电动观光车编队运行控制。
技术研发人员:尹成龙,彭勤,钟怡,张浩南
受保护的技术使用者:成都云科新能汽车技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!