一种汽车智能防侧翻装置及控制方法
本发明涉及汽车主动安全领域,尤其涉及一种汽车智能防侧翻装置及控制方法。
背景技术:
1、汽车侧翻是一种非常危险的事故,尤其在复杂道路状况下,地面坑坑洼洼,深浅不一,这使得车辆行驶极不平稳,即使在汽车低速行驶时也会导致失去平衡而侧翻,因此研制一种装置来防止汽车侧翻十分必要。
2、王新彦等发明了一种汽车防侧翻保护装置及其保护方法(202011284159.2),其中该装置包括车身,所述车身的底部固定安装有四组呈矩形阵列设置的固定座,每组所述固定座均与水平设置的电磁伸缩机构固定连接,位于同一侧的两组电磁伸缩机构的推杆通过销轴分别与双头伸缩杆的两组活塞杆相铰接。该方法在陀螺仪检测到汽车的侧倾角达到35°时,电磁伸缩机构自动迅速伸长,双头伸缩杆被瞬间拉长,增加了保护装置的长度和宽度,避免汽车的侧翻事故。但是结构过于复杂,并且该结构工作时会影响其他车辆的通过性。
3、杨利国等设计了一种防侧翻装置(202220904053.6)。该装置包括支撑轮和分别设置于车身两侧的两个延伸臂总成,延伸臂总成用于连接车身与支撑轮,包括第一折叠组件、第二折叠组件和中间部,中间部通过第一折叠组件与车身连接,中间部通过第二折叠组件与支撑轮连接;第一折叠组件能够使中部沿水平面转动,第二折叠组件能够使支撑轮沿水平面转动;第一折叠组件和第二折叠组件被配置为能使支撑轮在靠近货箱的折叠位和远离货箱的防侧翻位之间转换。该本实用新型,使车辆在esc试验后,在不拆卸防侧翻装置的情况下,将防侧翻装置沿水平面折收,减小防侧翻装置在车辆宽度方向上距离,提升车辆在行进过程中的安全性。但是折叠收缩过程过于复杂,且是人为控制,过于繁琐。
4、周平等设计了一种车辆防侧翻装置以及汽车(专利号202123230618.1),该防侧翻装置,包括连接组件,两个支撑组件和两个伸缩组件;所述连接组件可与汽车大梁连接;所述支撑组件的一端与所述连接组件转动连接,且两个所述支撑组件相对地设于所述连接组件的两侧;每个所述支撑组件的另一端通过一个所述伸缩组件与所述连接组件连接,通过所述伸缩组件使所述支撑组件保持在展开状态。在进行车辆侧翻测试实验或上路行驶时,展开支撑组件,为车辆侧翻时起支撑作用,使车辆在支撑组件的支撑作用下不能侧翻;当测试实验结束或行驶在稳定路况时后,将支撑组件折叠,减少占用空间。但是支撑组件极易磨损,且受力较为集中,容易断裂。
5、徐志远等发明了一种工程机械车辆自动防侧翻装置(202121481404.9),包括车体,所述车体上安装有处理器、执行设备、应急轮胎、防侧翻机构和检测终端,所述执行设备驱动防侧翻机构,且所述应急轮胎收纳在车体侧面位置上,所述防侧翻机构被固定在车体悬架前梁与后梁之间与应急轮胎连接,由所述防侧翻机构驱动至少一个应急轮胎伸出,防止侧翻,在紧急情况下,通过应急轮胎的弹出自锁动作,快速实现转向支撑,使得车体的惯性作用在应急轮胎上,可辅助车辆快速恢复平衡状态,且应急轮胎在收纳状态下,相当于悬空的两个轮子,不影响车辆作业。但是此设计结构复杂,应急轮胎极易磨损。
6、李奎等发明了一种车辆防侧翻支架(202010797868.4),包括支撑横梁和支撑轮;所述防侧翻支架还包括支撑臂,所述支撑臂上铰接有至少两根可伸缩支杆,分别为第一可伸缩支杆和第二可伸缩支杆;在远离汽车大梁的支撑横梁的端部铰接有转向座,所述转向座还分别与第一可伸缩支杆和支撑臂的一端铰接;在所述支撑轮上固定有轮胎座,所述轮胎座还分别与第二可伸缩支杆和支撑臂的另一端铰接。该防侧翻支架可以在水平方向上转动,转向架可根据需要进行90°折叠或完全展开,收展方便;同时实现了防侧翻支架的不同防护高度和不同防护角度的调节。但是在该结构工作时,车身宽度过大,影响其他车辆行驶。
技术实现思路
1、本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种汽车智能防侧翻装置及控制方法。
2、本发明为解决上述技术问题采用以下技术方案:
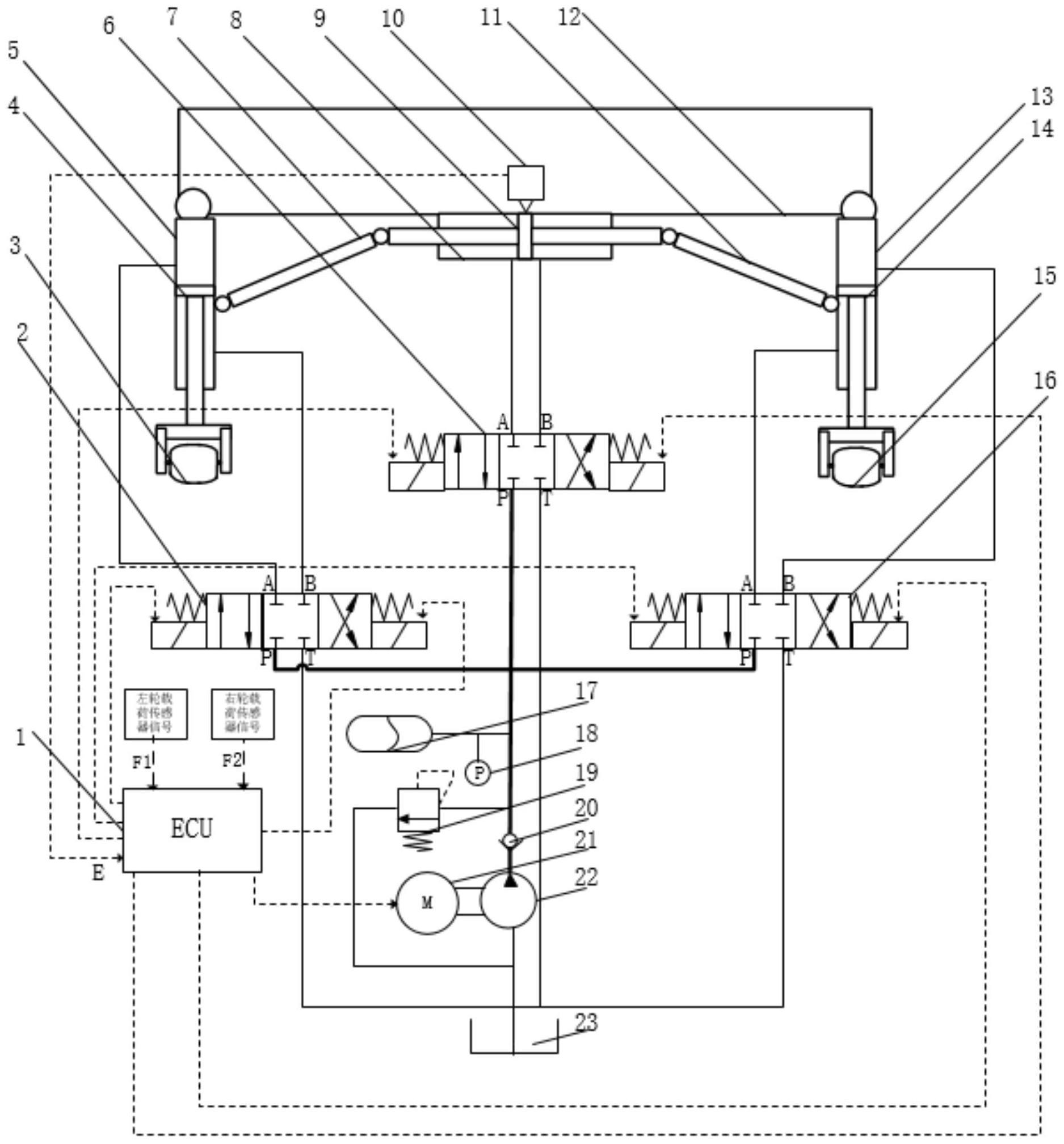
3、一种汽车智能防侧翻装置,包括控制单元ecu、第一三位四通电磁阀、左万向轮、左单活塞杆液压缸、第二三位四通电磁阀、左拉杆、双作用液压缸、位置传感器、右拉杆、右单活塞杆液压缸、右万向轮、第三三位四通电磁阀、油杯、高压液压源、左轮载荷传感器和右轮载荷传感器;
4、所述双作用液压缸固定在车架上,其两侧活塞杆均和车身方向垂直;所述位置传感器用于测量双作用液压缸内活塞的位置,并将其传递给所述控制单元ecu;
5、所述左单活塞杆液压缸、右单活塞杆液压缸对称设置在所述双作用液压缸左右两侧,其活塞缸底部均和车架铰接;所述左拉杆一端和所述左单活塞杆液压缸的活塞缸侧壁铰接,另一端和所述双作用液压缸左侧的活塞杆顶端铰接;所述右拉杆一端和所述右单活塞杆液压缸的活塞缸侧壁铰接,另一端和所述双作用液压缸右侧的活塞杆顶端铰接;
6、所述左万向轮、右万向轮分别固定在所述左单活塞杆液压缸、右单活塞杆液压缸活塞杆的顶端;
7、所述左轮载荷传感器、右轮载荷传感器分别设置在汽车的左后轮、右后轮处,分别用于测量车辆左后轮、右后轮的载荷力,并将其传递给所述控制单元ecu;
8、所述高压液压源包含高压蓄能器、压力传感器、安全阀、单向阀、电机和油泵;
9、所述高压蓄能器、电机、油泵均固定在车架上;
10、所述电机用于驱动所述油泵工作;所述油泵的输入口分别和所述油杯的输出口、安全阀的出口、第一三位四通电磁阀的t口、第二三位四通电磁阀的t口、第三三位四通电磁阀的t口管道相连,输出口和所述单向阀的输入口管道相连;
11、所述单向阀的输出口分别和所述安全阀的入口、高压蓄能器的出口、第一三位四通电磁阀的p口、第二三位四通电磁阀的p口、第三三位四通电磁阀的p口管道相连;
12、所述压力传感器设置在所述高压蓄能器的出口处,用于感应高压蓄能器出口处的压强,并将其传递给所述控制单元ecu;
13、所述第一三位四通电磁阀的a口和所述左单活塞杆液压缸的上腔相连,b口和左单活塞杆液压缸的下腔相连,用于控制所述左单活塞杆伸缩;
14、所述第二三位四通电磁阀的a口和所述双作用液压缸的左腔相连,b口和双作用液压缸的左腔相连,用于控制所述双作用活塞杆伸缩;
15、所述第三三位四通电磁阀的a口和所述右单活塞杆液压缸的下腔相连,b口和右单活塞杆液压缸的上腔相连用于控制所述右单活塞杆伸缩;
16、所述控制单元ecu分别和所述电机、第一三位四通电磁阀、第二三位四通电磁阀、第三三位四通电磁阀、位置传感器、左轮载荷传感器、右轮载荷传感器相连,用于根据位置传感器、左轮载荷传感器、右轮载荷传感器的感应信号控制所述电机、第一三位四通电磁阀、第二三位四通电磁阀、第三三位四通电磁阀工作。
17、本发明还公开了一种该汽车智能防侧翻装置的控制方法,包含以下步骤:
18、步骤1),左轮载荷传感器、右轮载荷传感器分别感应汽车左后轮处的载荷力f1、右后轮处的载荷力f2,并将其传递给所述控制单元ecu;
19、步骤2),控制单元ecu判断f1是否为0;
20、步骤2.1),若f1为0,此时左侧车轮离地侧翻,控制单元ecu控制第二三位四通电磁阀工作,使其a口和p口接通,b口和t口接通;同时控制第三三位四通电磁阀工作,使得其b口和p口接通,a口和t口接通;此时双作用液压缸的活塞向右运动,右单活塞杆液压缸伸长;
21、步骤2.2),若f1不为0,控制单元ecu判断f2是否为0;
22、步骤2.2.1),若f2为0,此时右侧车轮离地侧翻,控制单元ecu控制第二三位四通电磁阀工作,使其b口和p口接通,a口和t口接通;同时控制第一三位四通电磁阀工作,使其a口和p口接通,b口和t口接通;此时双作用液压缸的活塞向左运动,左单活塞杆液压缸伸长;
23、步骤2.2.2),当f2不为0时,控制单元ecu根据位置传感器的信号计算双作用液压缸中活塞的位置e;
24、步骤2.2.2.1),如果双作用液压缸中活塞的位置e位于其右侧,控制单元ecu控制第二三位四通电磁阀工作,使其b口和p口接通,a口和t口接通;同时控制第三三位四通电磁阀工作,使其a口和p口接通,b口和t口接通;此时双作用液压缸的活塞向左运动,右单活塞杆液压缸收缩;
25、步骤2.2.2.2),如果双作用液压缸中活塞的位置e位于其左侧,控制单元ecu控制第二三位四通电磁阀工作,使其a口和p口接通,b口和t口接通;同时控制第一三位四通电磁阀工作,使其b口和p口接通,a口和t口接通;此时双作用液压缸的活塞向右运动,左单活塞杆液压缸收缩;
26、步骤2.2.2.3),如果双作用液压缸中活塞的位置e位于其中间,车身无侧翻,控制单元ecu控制第一至第三三位四通电磁阀中的a、b、p、t口断开。
27、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
28、1.保障汽车通过性:两侧支撑轮与车轮纵向共线,不工作时不影响车辆本身的通过性,两侧支撑轮工作时,往两侧伸展的横向位置不超过后视镜,不影响其他车辆的通行。
29、2.改善汽车稳定性:根据同向转向增加车辆行驶稳定性的原理,采用多个且体积较小的支撑轮进行斜向布置,进一步增加了车身的稳定性。
30、3.防侧翻响应快:高压蓄能器一直保持高压提供动力,控制单元ecu控制高速电磁阀的启闭,快速实现防侧翻装置伸展及回收。
31、4.防侧翻智能化:需要支撑轮工作时,控制单元ecu精准分析,防侧翻装置自动伸展发挥作用;不需要工作时,控制单元ecu自动收回防侧翻装置,整个过程无需驾驶员进行任何操作。
32、5.结构简单,成本低:便于防侧翻装置在实车中安装。
- 还没有人留言评论。精彩留言会获得点赞!