新能源汽车安全驾驶辅助系统
本发明涉及汽车安全驾驶,尤其涉及新能源汽车安全驾驶辅助系统。
背景技术:
1、随着车辆技术的发展,越来越多的人选择驾车出行,当在驾驶过程中,由于驾驶员注意力不集中或疏忽大意,易导致车辆偏离车道行驶而发生碰撞追尾等事故,因而车道偏离预警系统应运而生,在汽车高速行驶时,车道偏离系统能有效地减轻驾驶员的疲劳。
2、通常的车道偏离预警系统在判断车辆即将偏离目标车道时,就会通过声音或方向盘抖动的方式提醒驾驶员进行道路修正,但当驾驶员需要正常换道时,车辆的预警会影响驾驶员对车辆的操控,同时,当车辆处于高速行驶过程中时,一定的声音或方向盘抖动的提醒时间可能不足以驾驶员及时修正路线,进而产生安全事故,对车辆以及乘员造成损伤,因此,我们提出了一种新能源汽车安全驾驶辅助系统来解决上述问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的新能源汽车安全驾驶辅助系统。
2、为了实现上述目的,本发明采用了如下技术方案:
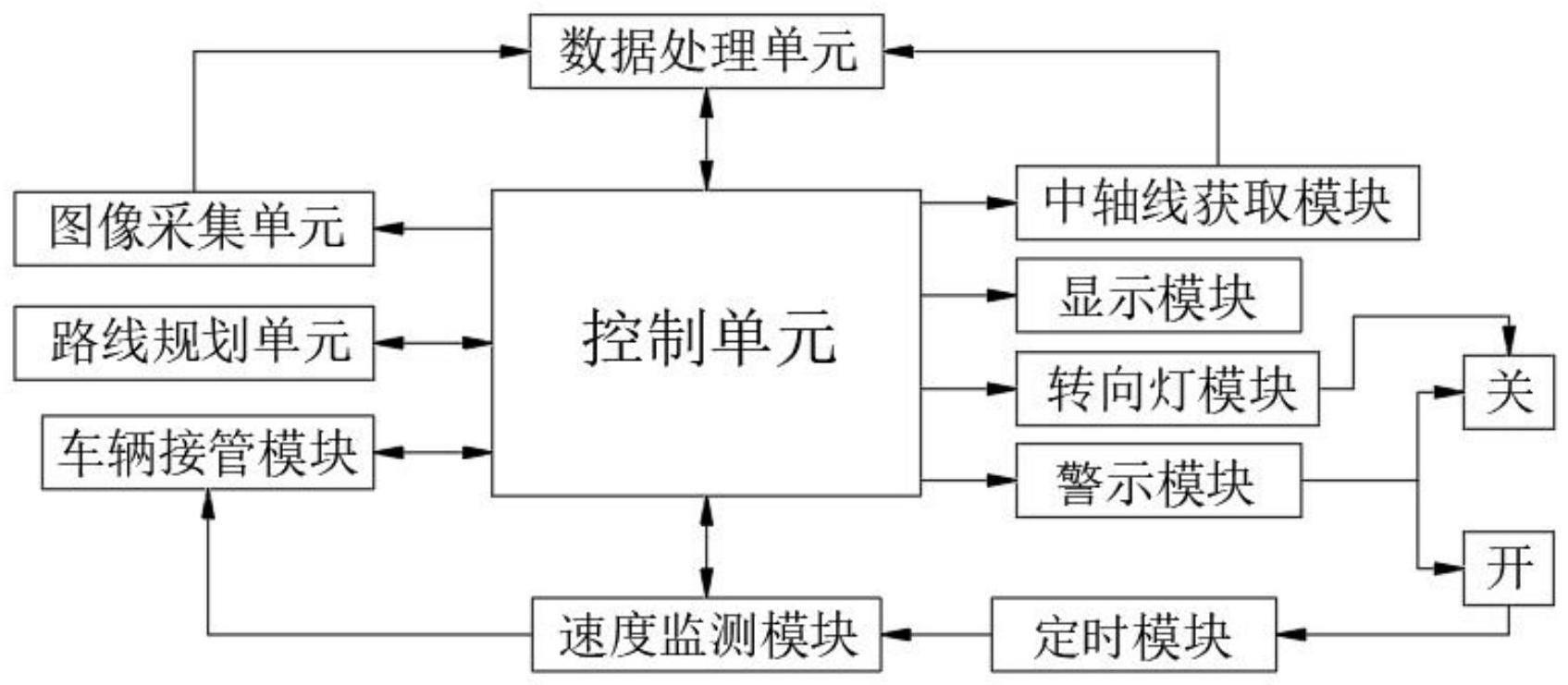
3、新能源汽车安全驾驶辅助系统,包括控制单元与所述控制单元双向连接的车辆接管模块、速度监测模块与数据处理模块,所述控制单元外接有图像采集单元,用于采集道路图像序列,对采集的每一帧图像依次进行灰度化、滤波和二值化处理,从而提取车道线;
4、中轴线获取模块,用于获取车辆中轴线,以了解车辆位于车道中的位置;
5、警示模块、转向灯模块,警示模块用于在转向灯闭合时对车辆偏离状态进行提醒;
6、定时模块,用于对警示模块的警示时间进行计时,并通过与上述速度监测模块的配合实现对车辆进行接管。
7、作为本发明的一种优选技术方案,所述数据处理模块用于接收图像采集单元与中轴线获取模块所采集的数据,并计算中轴线与两侧车道线之间的距离,并与设置阈值进行对比。
8、作为本发明的一种优选技术方案,所述车辆接管模块为车辆自动驾驶系统,用于对偏离车道的车辆进行接管,为驾驶员提供更多的时间进行车道偏离的纠正。
9、作为本发明的一种优选技术方案,所述速度监测模块中设置的阈值为60km/h,定时模块中设置的阈值为2s,当车辆速度大于60km/h时,2s对车辆进行自动接管。
10、作为本发明的一种优选技术方案,还包括与控制单元双向连接的路线规划单元,由路线规划单元对车辆驶出车道线时对十字路口处的行车路线进行规划,使其与对面车道进行虚拟对接,生成目标路径。
11、作为本发明的一种优选技术方案,所述路线规划模块的内部设置有地图定位模块,用于获取车辆的位置信息。
12、作为本发明的一种优选技术方案,还包括显示模块,所述显示模块为安装在汽车中控的显示屏,用于的车辆行车位置、车道线、车辆中轴线进行显示。
13、作为本发明的一种优选技术方案,所述警示模块为语音播报器或安装在方向盘内部的振动电机。
14、作为本发明的一种优选技术方案,在具有车道线的道路上行驶时包括以下监测步骤:
15、s1、元采集道路图像序列,对采集的每一帧图像依次进行灰度化、滤波和二值化处理,从而提取车道线;
16、s2、获取车辆中轴线,并计算车辆中轴线与两侧车道线之间的距离,与距离阈值进行对比;
17、s3、若超过距离阈值,且并未接收到打开车辆转向灯的信号时,则由警示模块对驾驶员进行预警;
18、s4、在预警一段时间后,驾驶员未对车辆做出纠偏时,对车辆进行接管,开启自动驾驶模式。
19、作为本发明的一种优选技术方案,在不具有车道线的十字路口上行驶时包括以下监测步骤:
20、s1、元采集道路图像序列,对采集的每一帧图像依次进行灰度化、滤波和二值化处理,从而提取车道线,并对已有的车道线进行虚拟延伸,使其与对面车道线对接;
21、s2、获取车辆中轴线,并计算车辆中轴线与两侧虚拟车道线之间的距离,与距离阈值进行对比;
22、s3、若超过距离阈值,且并未接收到打开车辆转向灯的信号时,则由警示模块对驾驶员进行预警;
23、s4、在预警一段时间后,驾驶员未对车辆做出纠偏时,对车辆进行接管,开启自动驾驶模式。
24、本发明的有益效果是:
25、1、在车辆进行正常变道时,本发明通过数据处理单元来对识别转向灯是否开启,若转向灯开启时对警示模块进行闭合,从而避免在车辆在正常变道时进行警示,便于驾驶员对车辆的正常操控。
26、2、在警示模块开启中,本装置速度监测模块与定时模块的配合来对车辆接管的时间进行确定,当车辆速度大于60km/h时,2秒对车辆进行自动接管,同时对车辆进行减速,为驾驶员提供更多的时间进行车道偏离的纠正,从而减少事故的发生。
27、3、当车辆在进入十字路口无法监测到车道线时,本发明在车辆驶出车道线之前,对已有的车道线进行虚拟延伸,使其与对面车道线对接,从而便于在没有车道线的十字路口处对车辆是否偏离道路进行警示。
28、综上所述,本发明只有在转向灯开启状态才会对车辆偏离道路进行警示,便于驾驶员对车辆的正常操控;同时,在具有车道线的道路与没有车道线的十字路口处均可在车辆偏离道路时一定时间使对车辆进行接管,为驾驶员提供更多的时间进行车道偏离的纠正,从而有效降低因驾驶员疲劳、分心等造成无意识车道偏离事故的发生。
技术特征:
1.一新能源汽车安全驾驶辅助系统,包括控制单元与所述控制单元双向连接的车辆接管模块、速度监测模块与数据处理模块,其特征在于,所述控制单元外接有图像采集单元,用于采集道路图像序列,对采集的每一帧图像依次进行灰度化、滤波和二值化处理,从而提取车道线;
2.根据权利要求1所述的新能源汽车安全驾驶辅助系统,其特征在于,所述数据处理模块用于接收图像采集单元与中轴线获取模块所采集的数据,并计算中轴线与两侧车道线之间的距离,并与设置阈值进行对比。
3.根据权利要求1所述的新能源汽车安全驾驶辅助系统,其特征在于,所述车辆接管模块为车辆自动驾驶系统,用于对偏离车道的车辆进行接管,为驾驶员提供更多的时间进行车道偏离的纠正。
4.根据权利要求3所述的新能源汽车安全驾驶辅助系统,其特征在于,所述速度监测模块中设置的阈值为60km/h,定时模块中设置的阈值为2s,当车辆速度大于60km/h时,2s对车辆进行自动接管。
5.根据权利要求1所述的新能源汽车安全驾驶辅助系统,其特征在于,还包括与控制单元双向连接的路线规划单元,由路线规划单元对车辆驶出车道线时对十字路口处的行车路线进行规划,使其与对面车道进行虚拟对接,生成目标路径。
6.根据权利要求5所述的新能源汽车安全驾驶辅助系统,其特征在于,所述路线规划模块的内部设置有地图定位模块,用于获取车辆的位置信息。
7.根据权利要求1所述的新能源汽车安全驾驶辅助系统,其特征在于,还包括显示模块,所述显示模块为安装在汽车中控的显示屏,用于的车辆行车位置、车道线、车辆中轴线进行显示。
8.根据权利要求1所述的新能源汽车安全驾驶辅助系统,其特征在于,所述警示模块为语音播报器或安装在方向盘内部的振动电机。
9.根据权利要求1-8任意一条所述的新能源汽车安全驾驶辅助系统,其特征在于,在具有车道线的道路上行驶时包括以下监测步骤:
10.根据权利要求1-8任意一条所述的新能源汽车安全驾驶辅助系统,其特征在于,在不具有车道线的十字路口上行驶时包括以下监测步骤:
技术总结
本发明涉及汽车安全驾驶技术领域,尤其涉及新能源汽车安全驾驶辅助系统,包括控制单元与所述控制单元双向连接的车辆接管模块、速度监测模块与数据处理模块,所述控制单元外接有图像采集单元,用于采集道路图像序列,对采集的每一帧图像依次进行灰度化、滤波和二值化处理,从而提取车道线;中轴线获取模块与定时模块。本发明只有在转向灯开启状态才会对车辆偏离道路进行警示,便于驾驶员对车辆的正常操控;同时,在具有车道线的道路与没有车道线的十字路口处均可在车辆偏离道路时一定时间使对车辆进行接管,为驾驶员提供更多的时间进行车道偏离的纠正,从而有效降低因驾驶员疲劳、分心等造成无意识车道偏离事故的发生。
技术研发人员:赵景波,廖连莹,刘海妹,孟浩东,徐永明,陈建锋
受保护的技术使用者:常州工学院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!