车辆控制方法、装置、设备、存储介质及程序产品与流程
本技术涉及车辆控制,尤其涉及一种车辆控制方法、装置、设备、存储介质及程序产品。
背景技术:
1、驾驶员在驾驶当前车辆时,都会基于车辆周围的环境、以及其前车和后车的实际情况,对车辆进行控制,以保证驾驶安全。
2、目前,当前车辆可以通过雷达或者超声波对前方和/或后方的障碍物进行判断,以提示驾驶员有障碍物的存在,驾驶员自主进行相应的操作。但是,无法为驾驶员提供需要操作的实际方案,例如加速、减速或者变更车道等,过于依赖驾驶员的驾驶经验。
技术实现思路
1、本技术提供一种车辆控制方法、装置、设备、存储介质及程序产品,用以解决相关技术中无法为驾驶员提供需要操作的实际方案的问题。
2、第一方面,本技术提供一种车辆控制方法,包括:
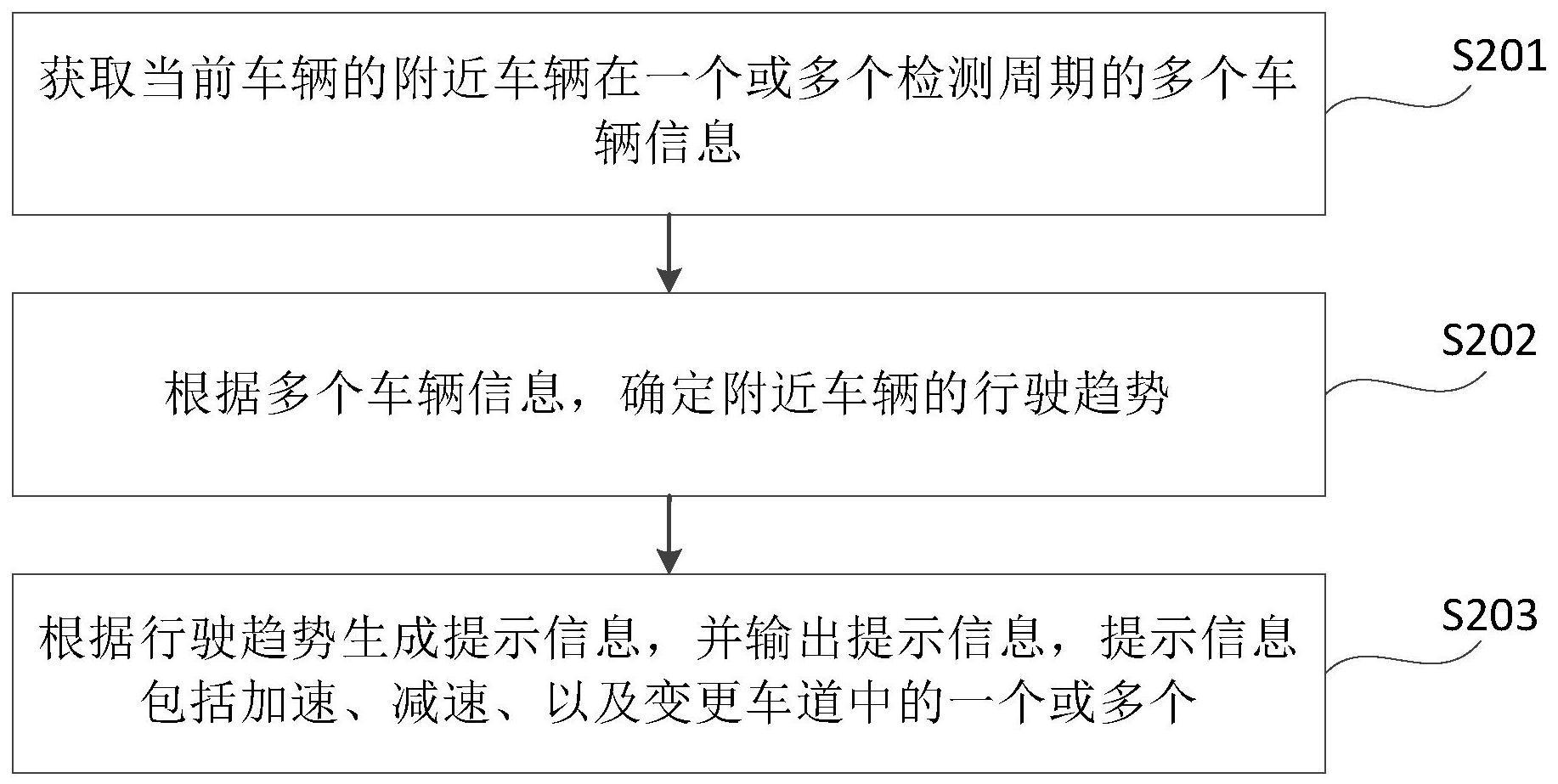
3、获取当前车辆的附近车辆在一个或多个检测周期的多个车辆信息,所述车辆信息包括所述附近车辆的第一速度、以及所述附近车辆与所述当前车辆之间的第一距离,所述附近车辆包括前车和/或后车;
4、根据所述多个车辆信息,确定所述附近车辆的行驶趋势;
5、根据所述行驶趋势生成提示信息,并输出所述提示信息,所述提示信息包括加速、减速、以及变更车道中的一个或多个。
6、在一种可能的实施方式中,针对任意一个检测周期;获取所述附近车辆在所述检测周期的车辆信息,包括:
7、通过检测设备获取所述附近车辆在所述检测周期中的n个第二速度,所述n为大于或者等于1的整数;
8、根据所述n个第二速度,确定所述附近车辆在所述检测周期的第一速度;
9、获取所述当前车辆的第三速度和所述检测设备的设备信息;
10、根据所述n个第二速度、所述第三速度和所述设备信息,确定所述检测周期中所述附近车辆与所述当前车辆之间的第一距离。
11、在一种可能的实施方式中,所述检测设备为超声波或者雷达,所述设备信息包括所述超声波或者所述雷达的传输速度;
12、所述根据所述n个第二速度、所述第三速度和所述设备信息,确定所述检测周期中所述附近车辆与所述当前车辆之间的第一距离,包括:
13、获取所述检测设备检测得到所述n个第二速度所消耗的n个时长;
14、根据所述n个第二速度、所述第三速度、所述传输速度和所述n个时长,确定n个第二距离;
15、将所述n个第二距离的均值,确定所述检测周期中所述附近车辆与所述当前车辆之间的第一距离。
16、在一种可能的实施方式中,所述根据所述多个车辆信息,确定所述附近车辆的行驶趋势,包括:
17、获取所述附近车辆的车辆类型,所述车辆类型为后车类型或者前车类型;
18、根据所述多个第一速度,确定速度变化趋势;
19、根据所述多个第一距离,确定距离变化趋势;
20、根据所述车辆类型、所述速度变化趋势、所述距离变化趋势,确定所述行驶趋势。
21、在一种可能的实施方式中,所述车辆类型为后车类型;
22、所述根据所述车辆类型、所述速度变化趋势、所述距离变化趋势,确定所述行驶趋势,包括:
23、若所述速度变化趋势为增大趋势,所述距离变化趋势为减小趋势,则确定所述行驶趋势为:正在加速,且正在缩短所述当前车辆与所述附近车辆的安全距离。
24、在一种可能的实施方式中,所述车辆类型为前车类型;
25、所述根据所述车辆类型、所述速度变化趋势、所述距离变化趋势,确定所述行驶趋势,包括:
26、若所述速度变化趋势为减小趋势,所述距离变化趋势为减小趋势,则确定所述行驶趋势为:正在减速,且正在缩短所述当前车辆与所述附近车辆的安全距离。
27、在一种可能的实施方式中,根据所述行驶趋势生成提示信息,包括:
28、若所述行驶趋势为:正在加速,且正在缩短所述当前车辆与所述附近车辆的安全距离,则生成所述提示信息为在限速范围内加速或者变更车道;
29、若所述行驶趋势为:正在减速,且正在缩短所述当前车辆与所述附近车辆的安全距离,则生成所述提示信息为减速或者变更车道。
30、第二方面,本技术提供一种车辆控制装置,包括:
31、获取模块,用于获取当前车辆的附近车辆在一个或多个检测周期的多个车辆信息,所述车辆信息包括所述附近车辆的第一速度、以及所述附近车辆与所述当前车辆之间的第一距离,所述附近车辆包括前车和/或后车;
32、确定模块,用于根据所述多个车辆信息,确定所述附近车辆的行驶趋势;
33、输出模块,用于根据所述行驶趋势生成提示信息,并输出所述提示信息,所述提示信息包括加速、减速、以及变更车道中的一个或多个。
34、在一种可能的实施方式中,针对任意一个检测周期;所述获取模块具体用于:
35、通过检测设备获取所述附近车辆在所述检测周期中的n个第二速度,所述n为大于或者等于1的整数;
36、根据所述n个第二速度,确定所述附近车辆在所述检测周期的第一速度;
37、获取所述当前车辆的第三速度和所述检测设备的设备信息;
38、根据所述n个第二速度、所述第三速度和所述设备信息,确定所述检测周期中所述附近车辆与所述当前车辆之间的第一距离。
39、在一种可能的实施方式中,所述检测设备为超声波或者雷达,所述设备信息包括所述超声波或者所述雷达的传输速度;
40、所述获取模块具体用于:
41、获取所述检测设备检测得到所述n个第二速度所消耗的n个时长;
42、根据所述n个第二速度、所述第三速度、所述传输速度和所述n个时长,确定n个第二距离;
43、将所述n个第二距离的均值,确定所述检测周期中所述附近车辆与所述当前车辆之间的第一距离。
44、在一种可能的实施方式中,所述确定模块具体用于:
45、获取所述附近车辆的车辆类型,所述车辆类型为后车类型或者前车类型;
46、根据所述多个第一速度,确定速度变化趋势;
47、根据所述多个第一距离,确定距离变化趋势;
48、根据所述车辆类型、所述速度变化趋势、所述距离变化趋势,确定所述行驶趋势。
49、在一种可能的实施方式中,所述车辆类型为后车类型;所述确定模块具体用于:
50、若所述速度变化趋势为增大趋势,所述距离变化趋势为减小趋势,则确定所述行驶趋势为:正在加速,且正在缩短所述当前车辆与所述附近车辆的安全距离。
51、在一种可能的实施方式中,所述车辆类型为前车类型;所述确定模块具体用于:
52、若所述速度变化趋势为减小趋势,所述距离变化趋势为减小趋势,则确定所述行驶趋势为:正在减速,且正在缩短所述当前车辆与所述附近车辆的安全距离。
53、在一种可能的实施方式中,所述输出模块具体用于:
54、若所述行驶趋势为:正在加速,且正在缩短所述当前车辆与所述附近车辆的安全距离,则生成所述提示信息为在限速范围内加速或者变更车道;
55、若所述行驶趋势为:正在减速,且正在缩短所述当前车辆与所述附近车辆的安全距离,则生成所述提示信息为减速或者变更车道。
56、第三方面,本技术提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
57、所述存储器存储计算机执行指令;
58、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面所述的车辆控制方法。
59、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被计算机执行时用于实现如第一方面所述的车辆控制方法。
60、第五方面,本技术提供一种计算机程序产品,包括计算机程序,所述计算机程序被计算机执行时用于实现第一方面所述的车辆控制方法。
61、第六方面,本技术实施例提供一种芯片,所述芯片上存储有计算机程序,所述计算机程序被所述芯片执行时使得第一方面所述的车辆控制方法被执行。
62、在一种可能的实施方式中,所述芯片为芯片模组中的芯片。
63、第七方面,本技术实施例提供一种模组设备,所述模组设备包括电源模组、存储模组以及芯片模组;
64、其中,所述电源模组用于为所述模组设备提供电能;
65、所述存储模组用于存储数据和指令;
66、所述芯片模组用于执行第一方面所述的车辆控制方法。
67、本技术提供的一种车辆控制方法、装置、设备、存储介质及程序产品,获取当前车辆的附近车辆在一个或多个检测周期的多个车辆信息,其中,车辆信息包括附近车辆的第一速度、以及附近车辆与当前车辆之间的第一距离,附近车辆包括前车和/或后车。然后根据多个车辆信息,确定附近车辆的行驶趋势,并根据行驶趋势生成提示信息,并输出提示信息,提示信息包括加速、减速、以及变更车道中的一个或多个,为驾驶员提供实际操作的参考,不依赖驾驶员的驾驶经验和驾驶技术,即使在雨雾天气或者夜间,可以进一步提高车辆的驾驶安全性。
- 还没有人留言评论。精彩留言会获得点赞!