障碍物识别方法及自动驾驶车辆与流程
本技术涉及自动驾驶,特别涉及一种障碍物识别方法及自动驾驶车辆。
背景技术:
1、随着自动驾驶技术的快速发展,自动驾驶车辆可以对周围的环境进行识别,得到该自动驾驶车辆周围的障碍物,以便基于识别的障碍物进行路线规划,保证自动驾驶车辆避开产生阻碍的障碍物,提高自动驾驶车辆行驶的安全性,但是,目前提供的识别障碍物的方式准确性低。
技术实现思路
1、本技术实施例提供了一种障碍物识别方法及自动驾驶车辆,对障碍物识别综合考虑了障碍物的细节特征和整体特征,提高了识别障碍物的准确性,进而提高自动驾驶车辆行驶的安全性。该技术方案如下:
2、一方面,提供了一种障碍物识别方法,所述方法包括:
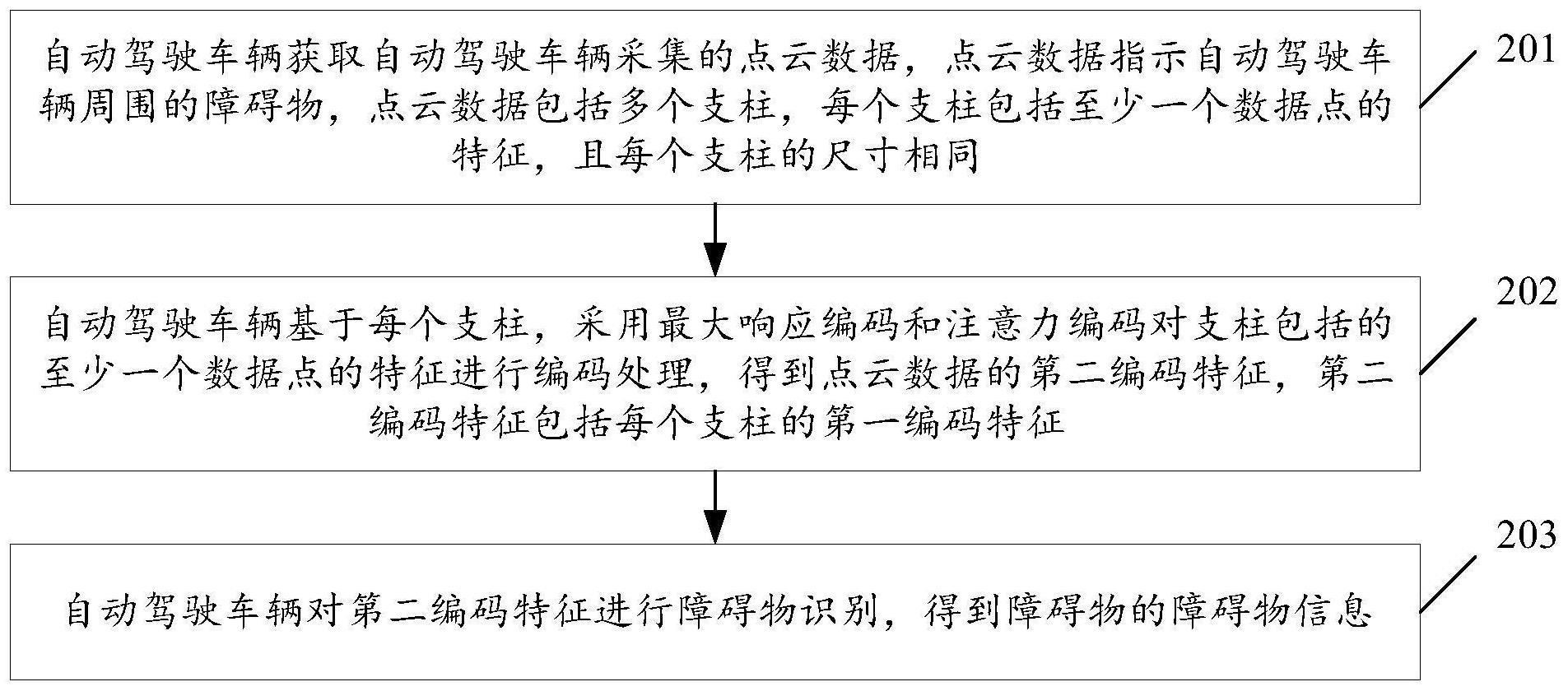
3、获取自动驾驶车辆采集的点云数据,所述点云数据指示所述自动驾驶车辆周围的障碍物,所述点云数据包括多个支柱,每个支柱包括至少一个数据点的特征,且每个所述支柱的尺寸相同;
4、基于每个所述支柱,采用最大响应编码和注意力编码对所述支柱包括的至少一个数据点的特征进行编码处理,得到所述点云数据的第二编码特征,所述第二编码特征包括每个所述支柱的第一编码特征;
5、对所述第二编码特征进行障碍物识别,得到所述障碍物的障碍物信息。
6、一方面,提供了一种障碍物识别装置,所述装置包括:
7、获取模块,用于获取自动驾驶车辆采集的点云数据,所述点云数据指示所述自动驾驶车辆周围的障碍物,所述点云数据包括多个支柱,每个支柱包括至少一个数据点的特征,且每个所述支柱的尺寸相同;
8、编码模块,用于基于每个所述支柱,采用最大响应编码和注意力编码对所述支柱包括的至少一个数据点的特征进行编码处理,得到所述点云数据的第二编码特征,所述第二编码特征包括每个所述支柱的第一编码特征;
9、识别模块,用于对所述第二编码特征进行障碍物识别,得到所述障碍物的障碍物信息。
10、在一种可能的实现方式中,所述编码模块,包括:
11、提取单元,用于对于每个所述支柱,对所述支柱包括的至少一个数据点的特征进行特征提取,得到每个数据点的预设维度的特征和对应的权重;
12、所述提取单元,还用于从所述支柱包括的至少一个数据点的特征中,提取每个维度对应的最大特征;
13、编码单元,用于对所述预设维度的特征和对应的权重进行注意力编码,得到注意力特征;
14、求和单元,用于对所述每个维度对应的最大特征和所述注意力特征中所述每个维度对应的特征进行求和,得到所述第二编码特征。
15、在一种可能的实现方式中,所述提取单元,用于:
16、对于每个所述支柱,对所述支柱的至少一个数据点的特征进行升维处理,得到升维特征;
17、对所述升维特征进行特征提取,得到所述至少一个数据点的预设维度的特征和对应的权重。
18、在一种可能的实现方式中,所述提取单元,用于:
19、对所述升维特征进行高维度特征提取,得到所述至少一个数据点的预设维度的特征,所述预设维度大于所述升维特征的维度;
20、对所述至少一个数据点的预设维度的特征进行归一化处理,得到所述至少一个数据点的预设维度的特征对应的权重。
21、在一种可能的实现方式中,所述编码单元,用于:
22、对所述预设维度的特征和对应的权重进行加权处理,得到加权特征;
23、对所述加权特征包括的所述至少一个数据点的特征进行加和,得到所述注意力特征。
24、在一种可能的实现方式中,所述识别模块,包括:
25、降维单元,用于对所述第二编码特征进行降维处理,得到降维特征;
26、识别单元,用于对所述降维特征进行障碍物识别,得到所述障碍物的障碍物信息。
27、在一种可能的实现方式中,所述降维单元,用于:
28、采用第一卷积网络和第二卷积网络,分别对所述第二编码特征进行卷积处理,得到处理后的第一卷积特征和第二卷积特征;
29、对所述第一卷积特征和第二卷积特征进行级联,得到级联特征;
30、对所述级联特征进行卷积处理,得到所述降维特征。
31、在一种可能的实现方式中,所述第一卷积网络包括多个卷积层,所述降维单元,用于:
32、分别采用所述多个卷积层中的每个卷积层对所述第二编码特征进行卷积处理,得到多个子卷积特征;
33、对所述多个子卷积特征、所述第二编码特征进行归一化处理,得到归一化后的多个归一化特征;
34、对所述归一化特征进行加和,得到所述第一卷积特征。
35、在一种可能的实现方式中,所述降维特征包括多层子特征,每层子特征的维度不同,所述识别单元,用于:
36、对所述降维特征中包括的最后一层子特征进行反卷积,得到与倒第二层子特征的维度相同的反卷积特征;
37、将所述反卷积特征和所述最后一层子特征进行拼接,得到拼接特征;
38、对所述拼接特征进行障碍物识别,得到所述障碍物的障碍物信息。
39、在一种可能的实现方式中,所述障碍物识别方法由目标检测模型执行,所述装置还包括:
40、所述获取模块,还用于获取样本点云数据和样本障碍物信息,所述样本点云数据指示所述自动驾驶车辆周围的样本障碍物,所述样本点云数据包括多个样本支柱,每个样本支柱包括至少一个数据点的特征,且每个样本支柱的尺寸相同;
41、所述识别模块,还用于调用所述目标检测模型,对所述样本点云数据中的每个所述样本支柱进行障碍物识别,得到预测障碍物信息;
42、所述装置还包括:训练模块,还用于基于所述样本障碍物信息和所述预测障碍物信息对所述目标检测模型进行训练,得到训练后的目标检测模型。
43、一方面,提供了一种自动驾驶车辆,所述自动驾驶车辆包括一个或多个处理器和一个或多个存储器,所述一个或多个存储器中存储有至少一条程序代码,所述至少一条程序代码由所述一个或多个处理器加载并执行以实现如上述任一种可能实现方式的障碍物识别方法所执行的操作。
44、一方面,提供了一种计算机可读存储介质,该存储介质中存储有至少一条程序代码,该至少一条程序代码由处理器加载并执行以实现如上述任一种可能实现方式的障碍物识别方法所执行的操作。
45、一方面,提供了一种计算机程序或计算机程序产品,所述计算机程序或计算机程序产品包括:计算机程序代码,所述计算机程序代码被自动驾驶车辆执行时,使得所述自动驾驶车辆实现如上述任一种可能实现方式的障碍物识别方法所执行的操作。
46、本技术提供了一种识别障碍物的方案,自动驾驶车辆获取包括障碍物的点云数据后,通过最大响应编码和注意力编码,对点云数据中每个支柱的数据点的特征进行编码,该最大响应编码可以通过提取特征的最大值,以得到障碍物的局部特征,该局部特征用于描述障碍物的细节特征,该注意力编码可以通过对特征进行加权以得到障碍物的全局特征,该全局特征用于描述障碍物的整体特征,因此对障碍物识别综合考虑了障碍物的细节特征和整体特征,提高了识别障碍物的准确性,进而提高自动驾驶车辆行驶的安全性。
- 还没有人留言评论。精彩留言会获得点赞!