行车控制方法、装置、设备及可读存储介质与流程
本发明涉及汽车电子,尤其一种涉及行车控制方法、装置、设备及可读存储介质。
背景技术:
1、山路工况复杂,尤其是在山路上一些危险工况,例如:急转弯、连续转弯、落石、动物出没等工况,如果驾驶员对山路不熟悉,驾驶不谨慎,很容易发生交通事故,为减少山路行车由于路况导致的危险,对驾驶员在行车时进行干预和警示非常有必要。
技术实现思路
1、本发明的主要目的在于提供一种行车控制方法、装置、设备及可读存储介质,旨在通过本发明,当车辆行驶在山路时,根据确定的山路路况等级自动控制车辆鸣笛,从而起到提醒其他车辆或行人的目的,且对车辆进行限速,保证了本车的行车安全。
2、第一方面,本发明提供一种行车控制方法,所述行车控制方法包括:
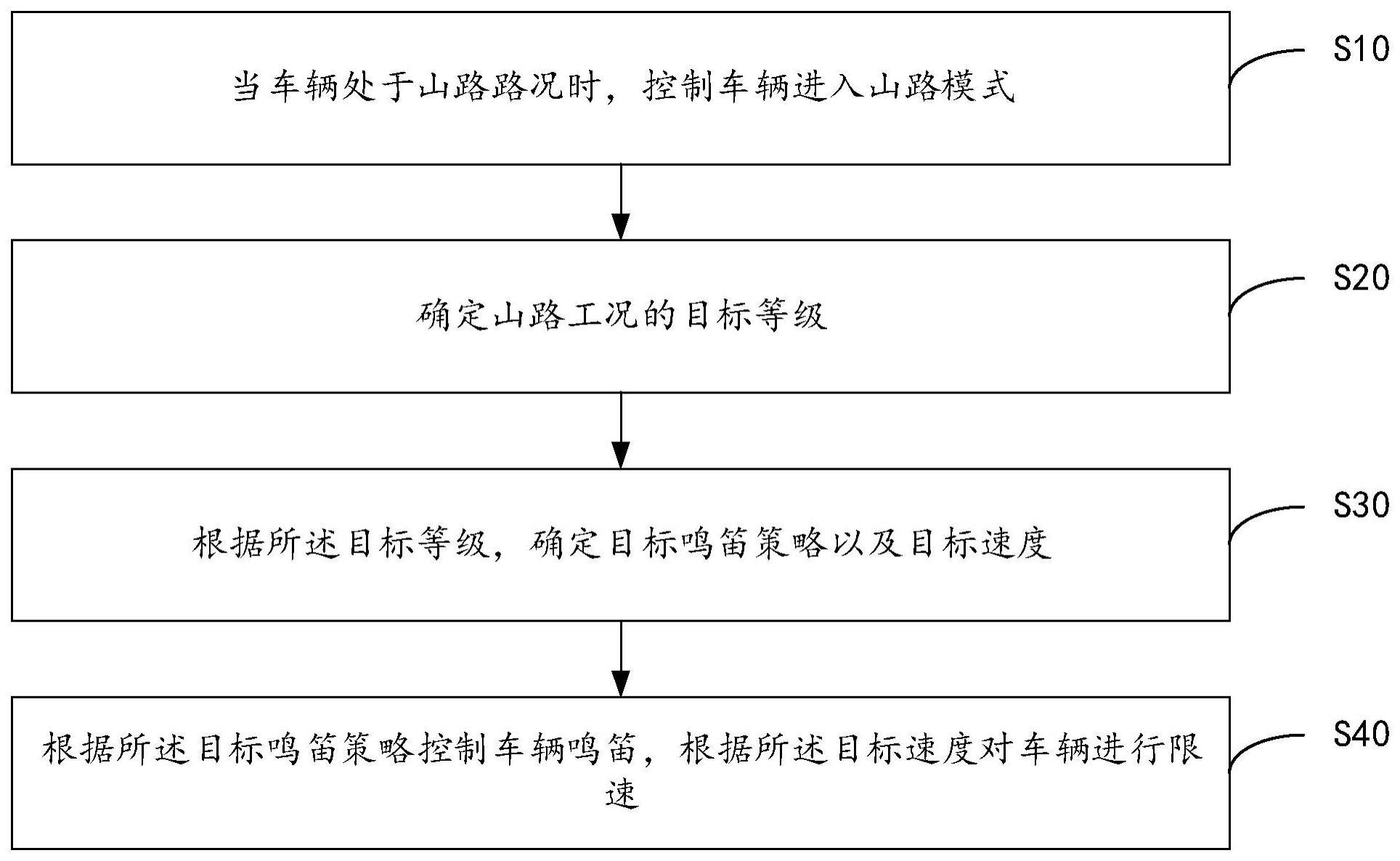
3、当车辆处于山路路况时,控制车辆进入山路模式;
4、确定山路工况的目标等级;
5、根据所述目标等级,确定目标鸣笛策略以及目标速度;
6、根据所述目标鸣笛策略控制车辆鸣笛,根据所述目标速度对车辆进行限速。
7、可选的,在所述当车辆处于山路路况时,控制车辆进入山路模式的步骤之前,还包括:
8、检测车辆位置是否处于预设山路位置范围;
9、若所述车辆位置处于所述预设山路位置范围,则确定车辆处于山路路况;
10、或,检测车辆在行驶第一距离后,海拔高度变化是否大于第一阈值;
11、若车辆在行驶所述第一距离后,所述海拔高度变化大于所述第一阈值,则确定车辆处于山路路况。
12、可选的,所述确定山路工况的目标等级的步骤包括:
13、检测摄像头采集的车辆前方道路的图像中是否存在道路标识;
14、若所述图像中存在所述道路标识,则根据所述道路标识,确定所述山路工况的目标等级;
15、若所述车辆前方道路的图像信息中不存在所述道路标识,则获取车辆位置,根据所述车辆位置确定所述山路工况的目标等级;
16、或,若所述车辆前方道路的图像信息中不存在所述道路标识,则获取车辆到复杂路况的距离;
17、根据所述距离确定所述山路工况的目标等级;
18、或,若所述车辆前方道路的图像信息中不存在所述道路标识,则获取车辆前方道路的坡度值;
19、根据所述坡度值确定所述山路工况的目标等级。
20、可选的,在所述根据所述目标速度对车辆进行限速的步骤之后,还包括:
21、检测车辆后方预警区域内是否存在目标车辆;
22、若车辆后方预警区域内存在所述目标车辆,检测车辆在所述目标车速下行驶是否会与所述目标车辆发生碰撞;
23、若车辆在所述目标车速下行驶会与所述目标车辆发生碰撞,则解除限速。
24、可选的,在所述检测车辆在所述目标车速下行驶是否会与所述目标车辆发生碰撞的步骤之后,还包括:
25、若车辆在所述目标车速下行驶会与所述目标车辆发生碰撞,则控制车辆退出山路模式。
26、可选的,在所述根据所述目标鸣笛策略控制车辆鸣笛,根据所述目标速度对车辆进行限速的步骤之后,还包括:
27、采集车辆加速踏板的开度值;
28、检测所述开度值是否大于第二阈值;
29、若所述开度值大于所述第二阈值,则控制车辆退出山路模式;
30、若所述开度值不大于所述第二阈值,则检测在预设时长内是否采集到至少n个大于第三阈值的开度值,n为大于1的正整数,所述第三阈值小于所述第二阈值;
31、若在所述预设时长内采集到至少n个大于所述第三阈值的所述开度值,则控制车辆退出山路模式。
32、第二方面,本发明还提供一种行车控制装置,所述行车控制装置包括:
33、控制模块,用于当车辆处于山路路况时,控制车辆进入山路模式;
34、第一确定模块,用于确定山路工况的目标等级;
35、第二确定模块,用于根据所述目标等级,确定目标鸣笛策略以及目标速度;
36、调节模块,用于根据所述目标鸣笛策略控制车辆鸣笛,根据所述目标速度对车辆进行限速。
37、第三方面,本发明还提供一种行车控制设备,所述行车控制设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的行车控制程序,其中所述行车控制程序被所述处理器执行时,实现如上所述的行车控制方法的步骤。
38、第四方面,本发明还提供一种可读存储介质,所述可读存储介质上存储有行车控制程序,其中所述行车控制程序被处理器执行时,实现如上所述的行车控制方法的步骤。
39、本发明中,当车辆处于山路路况时,控制车辆进入山路模式;确定山路工况的目标等级;根据所述目标等级,确定目标鸣笛策略以及目标速度;根据所述目标鸣笛策略控制车辆鸣笛,根据所述目标速度对车辆进行限速。通过本发明,当车辆行驶在山路时,根据确定的山路路况等级自动控制车辆鸣笛,从而起到提醒其他车辆或行人的目的,且对车辆进行限速,保证了本车的行车安全。
技术特征:
1.一种行车控制方法,其特征在于,所述行车控制方法包括:
2.如权利要求1所述的行车控制方法,其特征在于,在所述当车辆处于山路路况时,控制车辆进入山路模式的步骤之前,还包括:
3.如权利要求1所述的行车控制方法,其特征在于,所述确定山路工况的目标等级的步骤包括:
4.如权利要求1所述的行车控制方法,其特征在于,在所述根据所述目标速度对车辆进行限速的步骤之后,还包括:
5.如权利要求4所述的行车控制方法,其特征在于,在所述检测车辆在所述目标车速下行驶是否会与所述目标车辆发生碰撞的步骤之后,还包括:
6.如权利要求1所述的行车控制方法,其特征在于,在所述根据所述目标鸣笛策略控制车辆鸣笛,根据所述目标速度对车辆进行限速的步骤之后,还包括:
7.如权利要求1至6中任一项所述的行车控制方法,其特征在于,所述控制车辆进入山路模式的步骤包括:
8.一种行车控制装置,其特征在于,所述行车控制装置包括:
9.一种行车控制设备,其特征在于,所述行车控制设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的行车控制程序,其中所述行车控制程序被所述处理器执行时,实现如权利要求1至7中任一项所述的行车控制方法的步骤。
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有行车控制程序,其中所述行车控制程序被处理器执行时,实现如权利要求1至7中任一项所述的行车控制方法的步骤。
技术总结
本发明提供一种行车控制方法、装置、设备及可读存储介质,包括:当车辆处于山路路况时,控制车辆进入山路模式;确定山路工况的目标等级;根据所述目标等级,确定目标鸣笛策略以及目标速度;根据所述目标鸣笛策略控制车辆鸣笛,根据所述目标速度对车辆进行限速。通过本发明,当车辆行驶在山路时,根据确定的山路路况等级自动控制车辆鸣笛,从而起到提醒其他车辆或行人的目的,且对车辆进行限速,保证了本车的行车安全。
技术研发人员:彭红涛,吴磊,张丽娜,吴坷,吴晶晶
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!