一种车辆运动状态计算方法
本发明涉及车辆运动状态计算领域,尤其是涉及一种车辆运动状态计算方法。
背景技术:
1、对车辆运动状态的判断是车辆能够智能感知环境的重要一环。车辆对环境的感知,包括了环境外形感知(视觉、激光雷达、超声波雷达等)和动力学感知(车辆所受的空气作用力和轮胎作用力)。其中环境外形感知无法作为车辆控制的直接输入,因为其不是对车辆的直接作用力,而动力学感知的对象作为车辆直接受到的外力,可以直接指导车辆的主动控制,也对汽车的安全性、操控性、舒适性等产生重要的影响。相比于空气作用力,轮胎作用力对车辆的运动状态影响更大,所以对车辆轮胎作用力的感知日趋重要。
2、现有的对车辆动力学感知的方法包括多种,比如直接通过车辆已知的动力学模型,利用车身姿态和加速度进行轮胎载荷的计算;还有研究通过研发可以测量载荷的轴承进行计算;还有研究对车辆悬架受力进行分析,从而利用力学解算出轮胎载荷等等。
3、上述研究大多可以实现离线的快速计算,但是在车载工况下,受限于车载算力,需要对算法进行合理拟合和简化,才可以满足精度高、速度快的基本需求。且上述方法大多是通过单一线程进行,并且每个模型都进行了一定的等效假设,所以在遇到复杂工况时不一定具备良好的适应性。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种车辆运动状态计算方法。
2、本发明的目的可以通过以下技术方案来实现:
3、一种车辆运动状态计算方法,包括以下步骤:
4、使用传感器组测量车辆运动学基本数据;
5、将所述车辆运动学基本数据输入至车辆运动状态计算模型中;
6、输出车辆运动学参数;
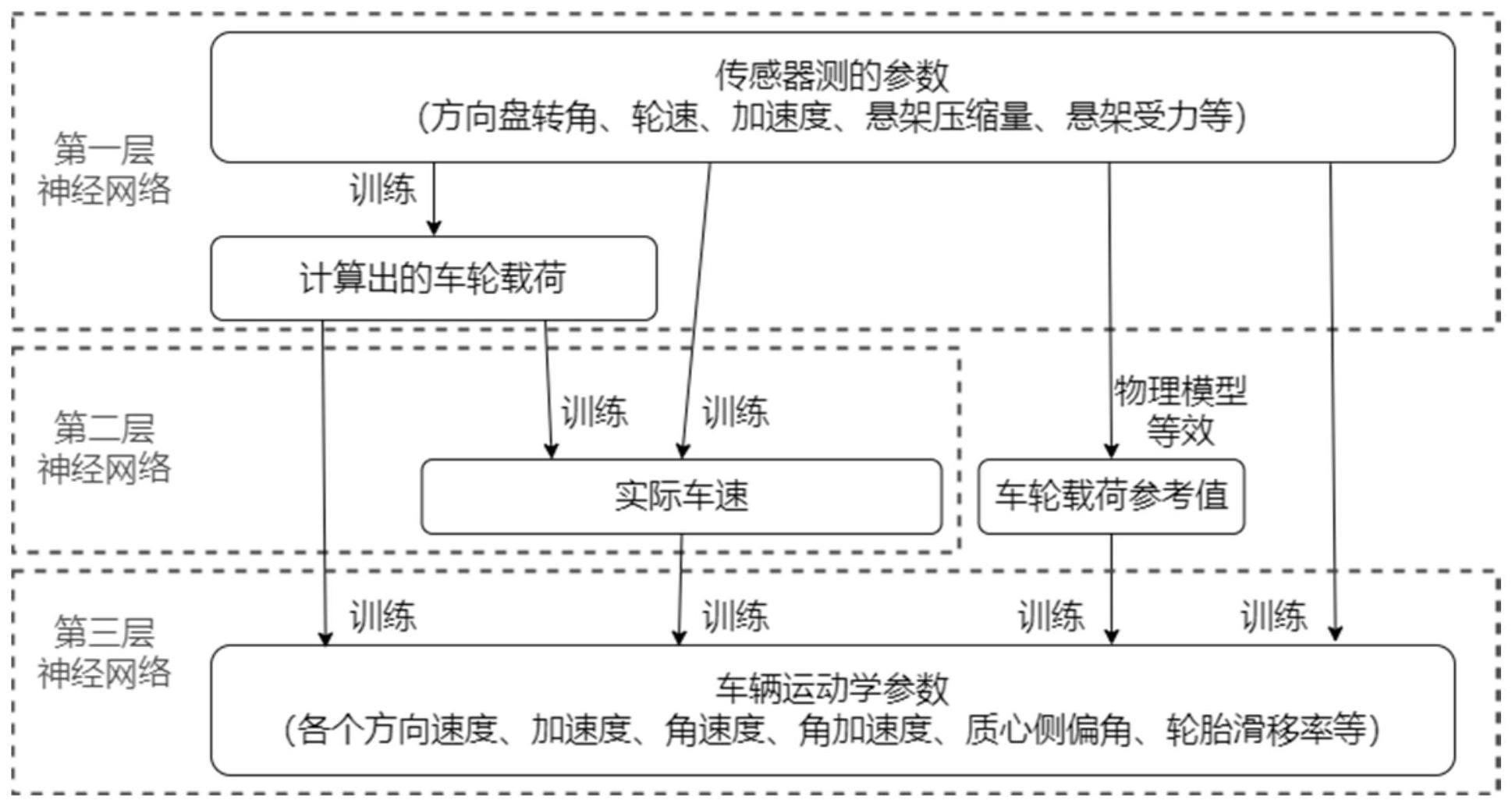
7、所述车辆运动状态计算模型包括第一层神经网络、第二层神经网络及第三层神经网络;
8、所述第一层神经网络的输入为使用传感器组测量的车辆运动学基本数据,输出为计算得到的车轮载荷;
9、所述第二层神经网络的输入为使用传感器组测量的车辆运动学基本数据及由第一层神经网络计算得到的车轮载荷,输出为车辆实时车速;
10、所述第三层神经网络的输入为使用传感器组测量的车辆运动学基本数据、由第一层神经网络计算得到的车轮载荷及通过等效物理模型得到的车轮载荷参考值;输出为车辆运动学参数。
11、进一步地,在第一层神经网络中,采用全连接方法;在第二层神经网络和第三层神经网络中,采用dropout连接网络。
12、进一步地,所述通过等效物理模型得到的车轮载荷参考值具体为:基于整车的已知质量和加速度信息,计算车辆的载荷转移,从而计算各个车轮的载荷参考值。
13、进一步地,所述的车辆运动学基本数据包括车速、车辆加速度、方向盘转角、轮速、悬架压缩量、悬架受力、制动油压及节气门开度。
14、进一步地,所述传感器组包括车速传感器、车辆加速度传感器、方向盘转角传感器、轮速传感器、悬架压缩线位移传感器、悬架受力传感器、制动油压传感器及节气门开度传感器。
15、进一步地,所述车辆运动学参数包括角加速度、质心侧偏角及轮胎滑移率。
16、进一步地,所述车辆运动状态计算模型的构建包括以下步骤:
17、s1、在车辆运动状态下,使用传感器组测量车辆运动学基本数据;
18、s2、基于所述车辆运动学基本数据计算车轮载荷;
19、s3、重复执行步骤s1及步骤s2,构建第一层神经网络的训练集和测试集;
20、s4、构建第一层神经网络,基于所述第一层神经网络的训练集,通过神经网络的非线性拟合得到所述车辆运动学基本数据与车轮载荷的关系;
21、s5、基于所述车辆运动学基本数据及所述车轮载荷,计算车辆实时车速,构建第二层神经网络的训练集和测试集;
22、s6、构建第二层神经网络,基于所述第二层神经网络的训练集,拟合得到所述车辆运动学基本数据及车轮载荷与车辆实时车速的关系;
23、s7、基于所述车辆运动学基本数据、车轮载荷及车辆实时车速,结合通过等效物理模型得到的车轮载荷参考值,计算车辆运动学参数,构建第三层神经网络的训练集和测试集;
24、s8、构建第三层神经网络,基于所述第三层神经网络的训练集,拟合得到所述车辆运动学基本数据、车轮载荷、车辆实时车速及车轮载荷参考值与车辆运动学参数的关系,完成模型的构建。
25、进一步地,所述车辆运动状态计算模型的构建还包括以下步骤:
26、使用第一层神经网络的测试集对第一层神经网络进行测试,使用第二层神经网络的测试集对第二层神经网络进行测试,使用第三层神经网络的测试集对第三层神经网络进行测试,若三层神经网络测试均达到预设标准,则模型构建成功,否则重新训练模型。
27、进一步地,步骤s5中,所述车辆实时车速的计算方法为:基于所述轮速传感器测量的数据计算车轮转动速度,在加速时取转速最小的车轮转动速度作为等效的实时车速,在制动时取转速最大的车轮转动速度作为等效的实时车速。
28、进一步地,所述车辆运动状态计算模型采用的激活函数为leaky relu函数。
29、与现有技术相比,本发明具有以下有益效果:
30、(1)本发明利用传感器组采集汽车的运动学基本数据,将汽车运动学和动力学基本原理作为神经网络训练的导向,利用神经网络对特殊情况的拟合,针对复杂工况仍能输出精度较高的计算结果,实现模型更高的实用性,融合了物理原理和数据分析两种方法的优势。
31、(2)本发明利用拟合完成的神经网络对复杂的车载计算进行简化,拟合之后的网络计算速度快,大大节省了车载计算时间和算力占用,为传感器数据的多层处理提供了更广泛的潜在用处。
技术特征:
1.一种车辆运动状态计算方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种车辆运动状态计算方法,其特征在于,在第一层神经网络中,采用全连接方法;在第二层神经网络和第三层神经网络中,采用dropout连接网络。
3.根据权利要求1所述的一种车辆运动状态计算方法,其特征在于,所述通过等效物理模型得到的车轮载荷参考值具体为:基于整车的已知质量和加速度信息,计算车辆的载荷转移,从而计算各个车轮的载荷参考值。
4.根据权利要求1所述的一种车辆运动状态计算方法,其特征在于,所述的车辆运动学基本数据包括车速、车辆加速度、方向盘转角、轮速、悬架压缩量、悬架受力、制动油压及节气门开度。
5.根据权利要求1所述的一种车辆运动状态计算方法,其特征在于,所述传感器组包括车速传感器、车辆加速度传感器、方向盘转角传感器、轮速传感器、悬架压缩线位移传感器、悬架受力传感器、制动油压传感器及节气门开度传感器。
6.根据权利要求5所述的一种车辆运动状态计算方法,其特征在于,所述车辆运动学参数包括角加速度、质心侧偏角及轮胎滑移率。
7.根据权利要求6所述的一种车辆运动状态计算方法,其特征在于,所述车辆运动状态计算模型的构建包括以下步骤:
8.根据权利要求7所述的一种车辆运动状态计算方法,其特征在于,所述车辆运动状态计算模型的构建还包括以下步骤:
9.根据权利要求8所述的一种车辆运动状态计算方法,其特征在于,步骤s5中,所述车辆实时车速的计算方法为:基于所述轮速传感器测量的数据计算车轮转动速度,在加速时取转速最小的车轮转动速度作为等效的实时车速,在制动时取转速最大的车轮转动速度作为等效的实时车速。
10.根据权利要求1所述的一种车辆运动状态计算方法,其特征在于,所述车辆运动状态计算模型采用的激活函数为leaky relu函数。
技术总结
本发明涉及一种车辆运动状态计算方法,包括:使用传感器组测量车辆运动学基本数据;将车辆运动学基本数据输入至车辆运动状态计算模型中;输出车辆运动学参数;其中模型包括三层神经网络;第一层神经网络的输入为使用传感器组测量的车辆运动学基本数据,输出为计算得到的车轮载荷;第二层神经网络的输入为使用传感器组测量的车辆运动学基本数据及由第一层神经网络计算得到的车轮载荷,输出为车辆实时车速;第三层神经网络的输入为使用传感器组测量的车辆运动学基本数据、由第一层神经网络计算得到的车轮载荷及通过等效物理模型得到的车轮载荷参考值;输出为车辆运动学参数。与现有技术相比,本发明具有精确度高、拟合之后的网络计算快等特点。
技术研发人员:曾添一,刘泽宇,陈昊天,陈辛波
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!