一种三体跨介质的无人航行器
本发明属于无人航行器领域,涉及了一种三体跨介质的无人航行器。
背景技术:
1、虽然我国拥有广袤的土地和宽阔的领海,但是复杂的海域环境以及变幻的国际形势给我国的领海主权带来了不小的挑战。未来战争的核心是科技之战,故把握创新、发展科技是我国面临复杂形势的首要任务。随着科技的发展,无人航行器技术的发展日新月异。
2、三体跨介质的三栖无人航行器是可在水面航行、水下潜行和空中航行的新概念航行器,它兼有航行器的速度和潜航器的隐蔽性,可获取水面、水下、空中的敌我信息,并可针对敌方防御体系弱点,综合利用空中和水中的突防手段突防,具有高效突防打击能力和多任务能力。同时,其采用的可变形三体结构兼具了三体船和水翼船在水中航行的快速性和耐波性的优点。这种全新的无人航行器的提出对我国保障领土主权和领海安全具有重要意义。
技术实现思路
1、发明目的:本发明的目的是提供了一种三体跨介质的无人航行器,其不仅能够实现水面、水下和空中的航行,还具有通过挂载模块的不同以执行多种不同任务的能力。
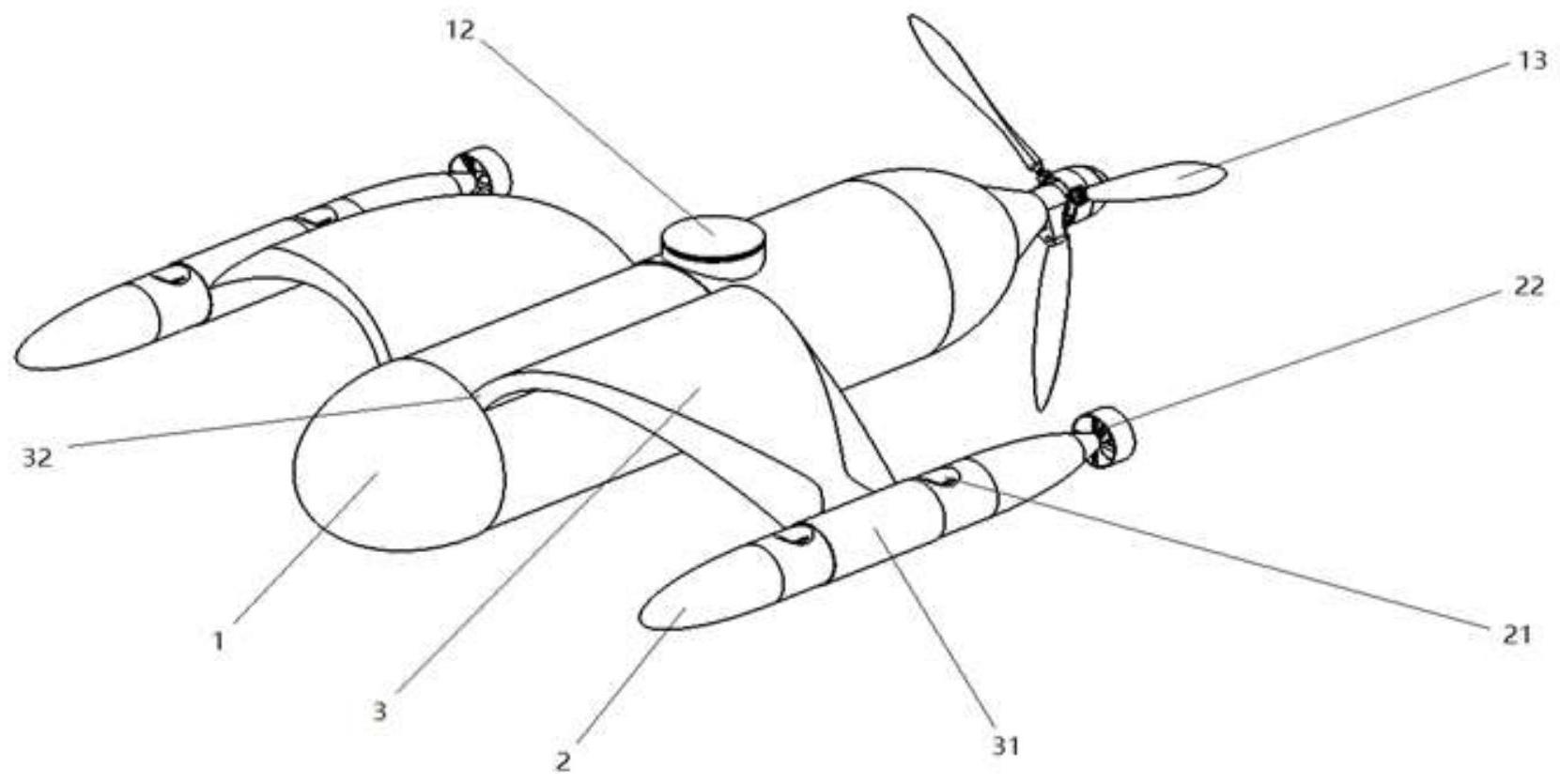
2、技术方案:本发明所述的一种三体跨介质的无人航行器,包括一个主体(1),在所述主体(1)的外壁的左右两侧分别布置有一个流线型旋转翼(3),所述流线型旋转翼(3)通过两端布置的旋转机构一(31)、及旋转机构二(32)分别与主体(1)和侧体(2)相连;
3、两个所述的侧体(2)在所述主体(1)的两侧对称布置;
4、在所述主体(1)的尾部还安设可折叠的航空螺旋桨(13)。
5、进一步的,在所述主体(1)上方布置有一个进排气装置(12);
6、所述进排气装置(12)主要在航空螺旋浆(13)工作时使用,为在发动机组中的航空煤油燃烧时提供必要的空气循环;
7、在水中航行时关闭且具有良好的密封性,在空中航行时开启;
8、所述主体(1)安设有旋转机构二(32),分别通过法兰固定两侧的流线型旋转翼(3),由主体(1)的控制区一(19)中的控制器通过电路传输控制信号至旋转机构二(32)的驱动电机,由此来控制侧体(2)相对于主体(1)的相对姿态。
9、进一步的,在所述主体(1)的内部布置有负载功能区一(14)、自适应油囊装置(15)、压载水舱一(16)、发动机及油箱(17)、挂载模块区(18)及控制区一(19);
10、所述负载功能区一(14)安置在主体(1)内部的前端并在压载水舱一(16)上方区域,主要用于放置控制压载水舱一(16)水量的水泵及其配套的控制元件,如驱动器、液位传感器等;
11、所述自适应油囊装置(15)布置在主体(1)内前部、中部和后部,聚在压载水舱一(16)的上方,主要通过油管与发动机及油箱(17)联接,并由控制区一(19)中的控制器通过电路传输控制信号至自适应油囊装置(15)中液压阀的开关控制其油量的大小,由此来控制航行器的重心,调节整体平衡;
12、所述压载水舱一(16)安置在主体(1)内自适应油囊装置(15)的下侧,主要应用于在三体船姿态、水翼船姿态和海鸥型姿态时通过控制进排水量实现对无人航行器稳性的调节,控制信号由控制区一(19)的控制器通过电路传输至负载功能区一(14)的驱动器来控制水泵工作;
13、所述发动机及油箱(17)安置在主体(1)内的后侧且位于进排气装置(12)的后方,主要由控制区一(19)中的控制器通过电路控制发动机及油箱(17)工作,为航空螺旋桨(13)提供动力源;
14、所述控制区一(19)安置在主体(1)内发动机及油箱(17)的后侧,其内部布置有各类控制器、无线信号接收器及各类传感器等必要控制元件,是无人航行器的“大脑”;
15、所述挂载模块区(18)安置在主体(1)内发动机及油箱(17)、控制区一(19)的下侧;
16、其主要根据不同的任务需求安装放置不同的设备,如救援物资、导弹等。
17、进一步的,在两个所述侧体(2)的主干部位各布置有两台两栖涵道风扇推进器(21),主要通过独立或组合使用实现无人航行器的跨介质动作,由侧体(2)的控制区二(26)中的控制器通过电路传输控制信号至两栖涵道风扇推进器(21)的驱动器来控制其转速达到改变推力的大小;
18、在两台两栖涵道风扇推进器(21)之间还布置有旋转机构一(31)与流线型旋转翼(3)通过法兰固定,由侧体(2)的控制区二(26)中的控制器通过电路传输控制信号至旋转机构一(31)的驱动电机,由此来控制侧体(2)上两栖涵道风扇推进器(21)的推力方向;
19、在两个所述侧体(2)的尾部均安设有水下无轴推进器(22),为无人航行器在水中航行提供动力源。
20、进一步的,在所述侧体(2)的内部从前往后开设有负载功能区二(23)、压载水舱二(24)、电池组(25)及控制区二(26);
21、所述负载功能区二(23)、压载水舱二(24)及控制区二(26)的内部布置与主体(1)类似,可实现相同的功能;
22、所述电池组(25)布置在侧体(2)上两台两栖涵道风扇推进器(21)的中间,通过电路分别为侧体(2)中的各类电子器件、驱动设备提供动力源。
23、进一步的,在两个所述流线型旋转翼(3)的翼身内部布置有充电线路;
24、主要在所述发动机及油箱(17)工作时可带动发电机工作,通过翼身内部布置的充电线路将电能存储在侧体(2)的电池组(25)中。
25、进一步的,所述流线型旋转翼(3)依据需求通过旋转机构二(32)的旋转改变主体(1)与侧体(2)的相对位置使整个航行器变换姿态,如三体船姿态、水翼船姿态和海鸥型姿态。
26、进一步的,所述主体(1)的航空螺旋桨(13)的动力源采用航空煤油,两个侧体(2)的两栖涵道风扇推进器(21)及水下无轴推进器(22)均采用电池组(25)供能。
27、进一步的,所述主体(1)的控制区一(19)和两个侧体(2)的控制区二(26)中布置有无线信号接收器,其可接收岸上遥控信号并将接收的信号通过电路传输至控制器,实现对无人航行器的远程控制。
28、有益效果:本发明与现有技术相比,本发明的特点是:本发明采用由三体架构形式组成的跨介质无人航行器,可依靠流线型旋转翼进行空间姿态的转化来适应水面航行、水下潜航和空中飞行的三栖场景;航行器具有三体船姿态、水翼船姿态和海鸥型姿态,其中三体船姿态可使航行器具有很强的耐波性和快速性。水翼船姿态可使航行器能在恶劣的海况下航行并且可以大大降低航行阻力,得以提高航行速度。海鸥型姿态能够为航行器提供最大的升力和滑行能力;主体尾部的挂载模块区可根据实时任务安装不同的设备,增加了航行器的应用场合。
技术特征:
1.一种三体跨介质的无人航行器,其特征在于,包括一个主体(1),在所述主体(1)的外壁的左右两侧分别布置有一个流线型旋转翼(3),所述流线型旋转翼(3)通过两端布置的旋转机构一(31)及旋转机构二(32)分别与主体(1)和侧体(2)相连;
2.根据权利要求1所述的一种三体跨介质的无人航行器,其特征在于,
3.根据权利要求2所述的一种三体跨介质的无人航行器,其特征在于,
4.根据权利要求1所述的一种三体跨介质的无人航行器,其特征在于,
5.根据权利要求4所述的一种三体跨介质的无人航行器,其特征在于,
6.根据权利要求1所述的一种三体跨介质的无人航行器,其特征在于,
7.根据权利要求1所述的一种三体跨介质的无人航行器,其特征在于,
8.根据权利要求1所述的一种三体跨介质的无人航行器,其特征在于,
9.根据权利要求1所述的一种三体跨介质的无人航行器,其特征在于,
技术总结
本发明公开了一种三体跨介质的无人航行器。属于无人航行器领域;包括相互连接的主体、侧体及流线型旋转翼,其中,所述主体包括进排气装置、航空螺旋桨、负载功能区一、自适应油囊系统、压载水舱一、发动机及油箱、挂载模块区及控制区一;所述侧体包括两栖涵道风扇推进器、水下无轴推进器、负载功能区二、压载水舱二、电池组及控制区二;所述流线型旋转翼包括旋转机构。本发明采用由三体架构形式组成的跨介质无人航行器,可依靠流线型旋转翼进行空间姿态的转化来适应水面航行、水下潜航和空中飞行的三栖场景;另外,所述主体尾部的挂载模块区可根据实时任务安装不同的设备,增加了航行器的应用场合。
技术研发人员:卢道华,李攀,马致远,汤雁冰,王佳
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!