一种新能源汽车电驱系统的优化控制系统及方法
本发明涉及新能源汽车电驱系统,尤其是涉及一种新能源汽车电驱系统的优化控制系统及方法。
背景技术:
1、电驱系统是新能源汽车核心系统之一,其性能决定了爬坡能力、加速能力以及最高车速等汽车行驶的主要性能指标。无论是 bev(纯电动汽车)、hev/phev(串并联结构)和燃料电池汽车均需要电驱系统驱动车辆。目前纯电动汽车行业电驱系统主流模式是将电机、电机控制器和减速器集成,构成三合—电驱系统。
2、电驱系统是新能源汽车能量消耗最大的系统,因此,提高电驱系统的效率,降低整车能量消耗,很有意义。而目前,电驱系统的控制方案一般仅根据电压对电机进行控制,能耗较大。
技术实现思路
1、本发明提供一种新能源汽车电驱系统的优化控制系统及方法,以提升电驱系统的效率,降低整车能量消耗,提高整车续航里程。
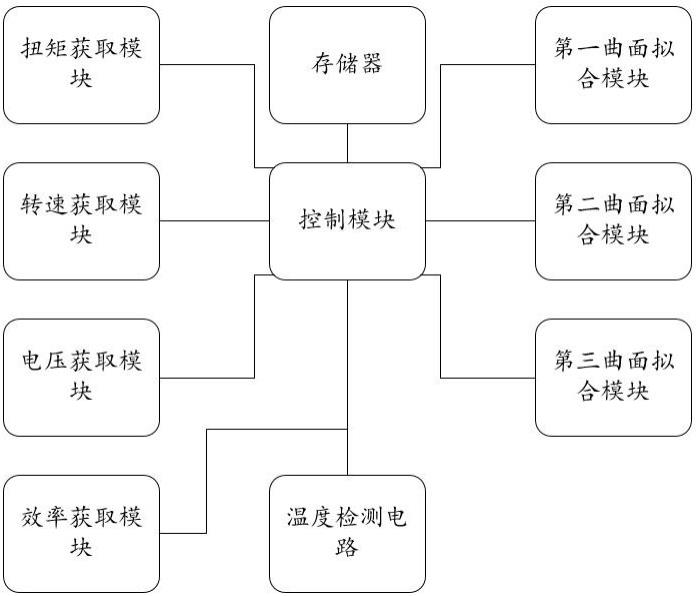
2、本发明实施例的一方面公开了一种新能源汽车电驱系统的优化控制系统,包括:
3、扭矩获取模块,用于获取电驱系统的电机扭矩;
4、转速获取模块,用于获取电驱系统的电机转速;
5、电压获取模块,用于获取电驱系统的电机电压;
6、效率获取模块,用于获取电驱系统的效率;
7、温度检测电路,用于获取电驱系统的电机温度;
8、第一曲面拟合模块,用于将所述电机温度作为行向量,将所述电机扭矩作为列向量,构成第一矩阵,并对所述第一矩阵进行预处理,去除nan值或0值,再导入所述效率,执行曲面拟合操作,获得三维曲面和温度曲面拟合方程,将该三维曲面记为第一效率参考域;
9、第二曲面拟合模块,用于将所述电机转速作为行向量,将所述电机扭矩作为列向量,构成第二矩阵,并对所述第二矩阵进行预处理,去除nan值或0值,再导入所述效率,执行曲面拟合操作,获得三维曲面和转速曲面拟合方程,将该三维曲面记为第二效率参考域;
10、第三曲面拟合模块,用于将所述电机电压作为行向量,将所述电机扭矩作为列向量,构成第三矩阵,并对所述第三矩阵进行预处理,去除nan值或0值,再导入所述效率,执行曲面拟合操作,获得三维曲面和电压曲面拟合方程,将该三维曲面记为第三效率参考域;
11、控制模块,用于基于所述第一效率参考域、第二效率参考域和第三效率参考域,根据驾驶员需求扭矩指令、实时的电机电压、实时的电机温度和实时的电机转速,对电机进行优化控制。
12、在一些实施例中,新能源汽车电驱系统的优化控制系统,还包括存储器,所述存储器存储温度-转速-电压-扭矩-电机控制电流表;所述控制模块还用于根据所述驾驶员需求扭矩指令、实时的电机电压、实时的电机温度和实时的电机转速,通过查询所述温度-转速-电压-扭矩-电机控制电流表以获取电机的d轴电流和q轴电流,并基于所述第一效率参考域、第二效率参考域和第三效率参考域,根据所述电机的d轴电流和q轴电流对所述电机进行辅助控制;
13、所述温度-转速-电压-扭矩-电机控制电流表的生成过程如下:
14、对电机进行台架标定,以获取多个目标电压;
15、在所述电机的全转速扭矩范围内获取多个转速标定点;
16、在每个目标电压下,标定不同电机温度下每个转速标定点的电机d轴电流和q轴电流,以使所述电驱系统的效率最优,生成所述温度-转速-电压-扭矩-电机控制电流表。
17、在一些实施例中,所述温度检测电路包括第一检测电路和第二检测电路,所述第一检测电路和第二检测电路用于将两者检测温度的均值作为电驱系统的电机温度,以提高检测精度。
18、在一些实施例中,所述第一检测电路包括电阻r1、电阻r2、电阻r3、电阻r4、电阻r5、电阻r6、电阻r7、可控稳压源d1、二极管d2、电位器vr1、铂热电阻p1、电容c1、运放u1a和运放u1b;
19、所述电阻r1的一端外接电压端,所述电阻r1的另一端与所述电位器vr1的第一定端、可控稳压源d1的负极和运放u1a的同相端连接,所述可控稳压源d1的参考极与所述电位器vr1的动端连接,所述可控稳压源d1的正极与所述电位器vr1的第二定端连接后接地,所述运放u1a的反相端与所述电阻r4的一端、铂热电阻p1的引脚2和接地的所述电阻r2连接,所述运放u1a的正极外接电压端,所述运放u1a的负极接地,所述运放u1a的输出端与所述铂热电阻p1的引脚1和电阻r3的一端连接,所述电阻r3的另一端与所述运放u1b的同相端和接地的所述电阻r5连接,所述运放u1b的反相端与所述电阻r4的另一端和电阻r6的一端连接,所述运放u1b的输出端与所述电阻r6的另一端和电阻r7的一端连接,所述电阻r7的另一端与所述二极管d2的负极和电容c1的一端连接后作为输出端out1,所述二极管d2的正极与所述电容c1的另一端连接后接地。
20、在一些实施例中,所述第二检测电路包括微控制器u2、电阻r8、电阻r9、电容c2、电容c3、电容c4、晶振y1、复位开关s1、温度传感器u3a、温度传感器u3b和温度传感器u3c;
21、所述复位开关s1的一端与电容c2的一端连接后外接电压端,所述复位开关s1的另一端与所述电阻r8的一端连接,所述电容c2的另一端与所述电阻r8的另一端、微控制器u2的引脚9和接地的所述电阻r9连接,所述晶振y1的一端与所述微控制器u2的引脚19和接地的所述电容c3连接,所述晶振y1的另一端与所述微控制器u2的引脚18和接地的所述电容c4连接,所述温度传感器u3a的引脚2与所述微控制器u2的引脚23连接,所述温度传感器u3b的引脚2与所述微控制器u2的引脚24连接,所述温度传感器u3c的引脚2与所述微控制器u2的引脚25连接。
22、本发明实施例的另一方面公开了一种新能源汽车电驱系统的优化控制方法,包括如下:
23、s1.获取电驱系统的电机扭矩、电机转速、电机电压、电机温度及效率;
24、s2.将所述电机温度作为行向量,将所述电机扭矩作为列向量,构成第一矩阵,并对所述第一矩阵进行预处理,去除nan值或0值,再导入所述效率,执行曲面拟合操作,获得三维曲面和温度曲面拟合方程,将该三维曲面记为第一效率参考域;
25、s3.将所述电机转速作为行向量,将所述电机扭矩作为列向量,构成第二矩阵,并对所述第二矩阵进行预处理,去除nan值或0值,再导入所述效率,执行曲面拟合操作,获得三维曲面和转速曲面拟合方程,将该三维曲面记为第二效率参考域;
26、s4.将所述电机电压作为行向量,将所述电机扭矩作为列向量,构成第三矩阵,并对所述第三矩阵进行预处理,去除nan值或0值,再导入所述效率,执行曲面拟合操作,获得三维曲面和电压曲面拟合方程,将该三维曲面记为第三效率参考域;
27、s5.基于所述第一效率参考域、第二效率参考域和第三效率参考域,根据驾驶员需求扭矩指令、实时的电机电压、实时的电机温度和实时的电机转速,对电机进行优化控制。
28、在一些实施例中,s5包括:
29、s51.执行驾驶员需求扭矩指令后,获取实时的电机扭矩、实时的电机电压、实时的电机温度和实时的电机转速;
30、s52.将实时的电机温度代入所述温度曲面拟合方程,获得目标值,若目标值大于0,则基于所述第一效率参考域,获取与实时的电机温度对应的第一扭矩;
31、s53.将实时的电机转速代入所述转速曲面拟合方程,获得目标值,若目标值大于0,则基于所述第二效率参考域,获取与实时的电机转速对应的第二扭矩;
32、s54.将实时的电机电压代入所述电压曲面拟合方程,获得目标值,若目标值大于0,则基于所述第三效率参考域,获取与实时的电机电压对应的第三扭矩;
33、s55.判断实时的电机扭矩的扭矩值是否位于所述第一扭矩、第二扭矩和第三扭矩三者之间的最大值和最小值之间,若是,则继续执行驾驶员需求扭矩指令,若否,则取所述第一扭矩、第二扭矩和第三扭矩三者的均值作为扭矩输出,以使所述电驱系统的效率最优。
34、在一些实施例中,s5还包括:
35、s56.根据所述驾驶员需求扭矩指令、实时的电机电压、实时的电机温度和实时的电机转速,通过查询所述温度-转速-电压-扭矩-电机控制电流表以获取电机的d轴电流和q轴电流,并基于所述第一效率参考域、第二效率参考域和第三效率参考域,根据所述电机的d轴电流和q轴电流对所述电机进行辅助控制;
36、所述温度-转速-电压-扭矩-电机控制电流表的生成过程如下:
37、对电机进行台架标定,以获取多个目标电压;
38、在所述电机的全转速扭矩范围内获取多个转速标定点;
39、在每个目标电压下,标定不同电机温度下每个转速标定点的电机d轴电流和q轴电流,以使所述电驱系统的效率最优,生成所述温度-转速-电压-扭矩-电机控制电流表。
40、综上所述,本发明至少具有以下有益效果:
41、本发明通过扭矩获取模块、转速获取模块、电压获取模块、效率获取模块和温度检测电路,分别获取电驱系统的电机扭矩、电机转速、电机电压、电机温度和效率;通过第一曲面拟合模块获得第一效率参考域和温度曲面拟合方程,通过第二曲面拟合模块获得第二效率参考域和转速曲面拟合方程,通过第三曲面拟合模块获得第三效率参考域和电压曲面拟合方程;通过控制模块,基于第一效率参考域、第二效率参考域和第三效率参考域,根据驾驶员需求扭矩指令、实时的电机电压、实时的电机温度和实时的电机转速,对电机进行优化控制。即本发明同时考虑了电机扭矩、电机转速、电机电压和电机温度对效率的影响,根据驾驶员需求扭矩指令综合优化控制电机,提升了电驱系统的效率,降低了整车能量消耗,提高了整车续航里程。
- 还没有人留言评论。精彩留言会获得点赞!