车辆的控制方法及车辆与流程
本发明涉及车辆,尤其是涉及一种车辆的控制方法及车辆。
背景技术:
1、新能源车辆尤其是纯电动重卡车由于电器元件的结构比较复杂,传感器数量较多,导致其在强磁场即在900gs-1300gs环境中容易发生can(controller area network,控制器局域网总线)总线通信故障、转向失效、制动失效、变速箱传感器失效和变速箱卡挡等故障。
2、目前,车辆的can网络通信技术通过can总线双绞后包裹屏蔽层与增加终端电阻等物理手段抵抗电磁干扰,但当车辆处于极限高强磁场强度的应用场景时例如电解铝车间时,采用上述方法无法完全抵抗电磁干扰,导致车辆的转向系统和制动系统的控制器失效,can通信出现故障,车辆无法正常制动和转向。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。
2、为此,本发明的一个目的在于提出一种车辆的控制方法,该方法保证转向电机和制动电机在车辆失效时的电源供给,使得车辆的can网络通信在失效等极端情况下,其转向系统和制动系统仍能按照can网络失效前的状态进行相应控制,保证能够正常运行,从而保障车辆行驶的安全性。
3、为此,本发明的第二个目的在于提出一种车辆。
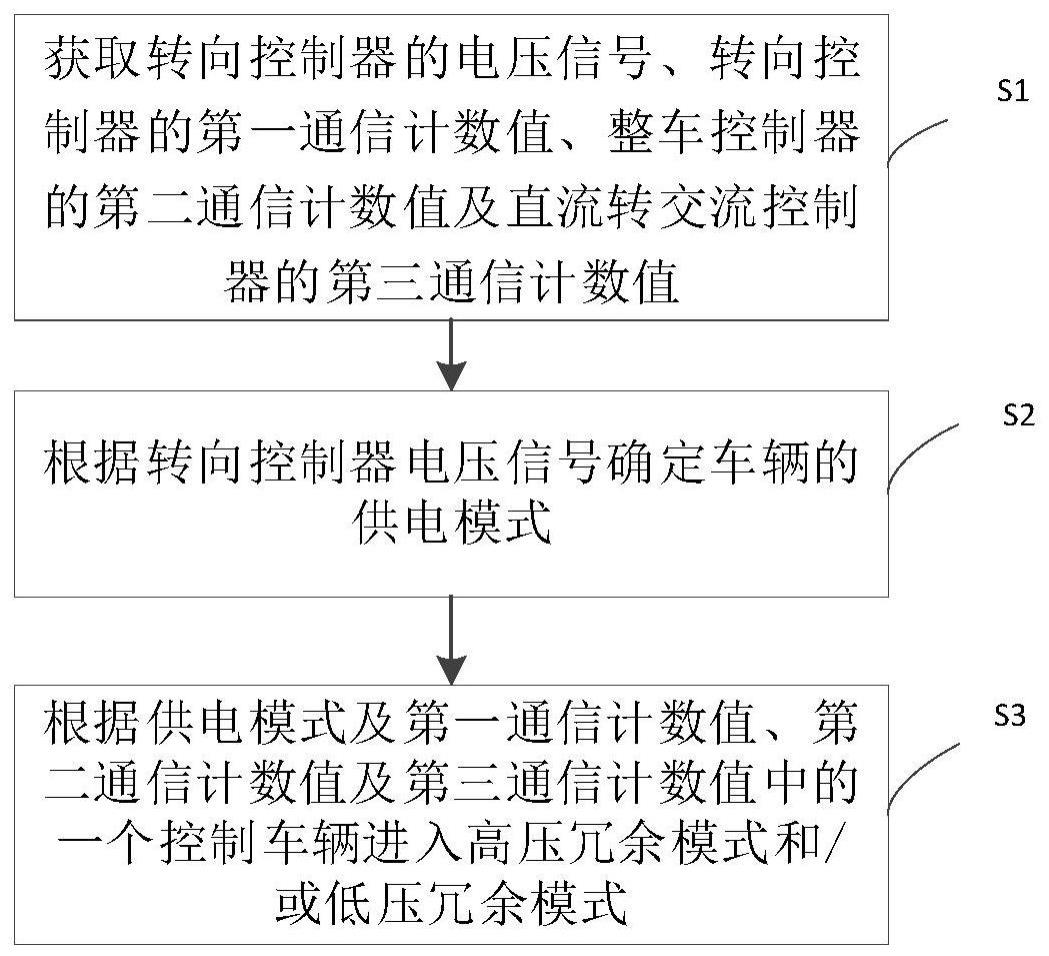
4、为了达到上述目的,本发明的第一方面的实施例提出了一种车辆的控制方法,所述车辆的控制方法包括:获取转向控制器的电压信号、转向控制器的第一通信计数值、整车控制器的第二通信计数值及直流转交流控制器的第三通信计数值;根据所述转向控制器电压信号确定所述车辆的供电模式;根据所述供电模式及所述第一通信计数值、所述第二通信计数值及所述第三通信计数值中的一个控制所述车辆进入高压冗余模式和/或低压冗余模式。
5、根据本发明实施例的车辆的控制方法,根据转向控制器的电压信号确定车辆的供电模式,在不同的供电模式中结合转向控制器的第一通信计数值、整车控制器的第二通信计数值及直流转交流控制器的第三通信计数值中的一个,控制车辆对应进入高压冗余模式和/或低压冗余模式,通过控制车辆进入冗余模式,保证转向电机和制动电机在车辆失效时的电源供给,使得车辆的can网络通信在失效等极端情况下,其转向系统和制动系统仍能按照can网络失效前的状态进行相应控制,保证能够正常运行,从而保障车辆行驶的安全性。
6、在一些实施例中,根据所述转向控制器电压信号确定所述车辆的供电模式,包括:判断所述电压信号是否为高压输入信号;若是,确定所述车辆的供电模式为高压供电模式;否则,确定所述车辆的供电模式为低压供电模式。
7、在一些实施例中,根据所述供电模式及所述第一通信计数值、所述第二通信计数值及所述第三通信计数值中的一个控制所述车辆进入高压冗余模式和/或低压冗余模式,包括:当所述供电模式为高压供电模式时,判断所述转向控制器接收的第一通信计数值在第一预设时间内是否满足第一预设数量;若是,确定所述转向控制器与所述整车控制器之间的can总线未失效,并控制所述车辆进入所述高压冗余模式;否则,确定所述转向控制器与所述整车控制器之间的can总线失效,控制所述车辆进入高压冗余模式和低压冗余模式,并显示所述车辆进入所述低压冗余模式的提示信息。
8、在一些实施例中,根据所述供电模式及所述第一通信计数值、所述第二通信计数值及所述第三通信计数值中的一个控制所述车辆进入高压冗余模式和/或低压冗余模式,包括:当所述供电模式为高压供电模式,若所述转向控制器与所述整车控制器之间的信息can总线失效且所述整车控制器与所述直流转交流控制之间的动力can总线未失效,控制所述车辆进入高压冗余模式;当所述供电模式为高压供电模式,若所述转向控制器与所述整车控制器之间的信息can总线未失效且所述整车控制器与所述直流转交流控制之间的动力can总线失效,控制所述车辆进入所述高压冗余模式;当所述供电模式为高压供电模式时,若所述转向控制器与所述整车控制器之间的信息can总线失效且所述整车控制器与所述直流转交流控制之间的动力can总线失效,则控制所述车辆进入所述高压冗余模式;当所述供电模式为高压供电模式时,若所述转向控制器与所述整车控制器之间的信息can总线未失效且所述整车控制器与所述直流转交流控制之间的动力can总线未失效,则控制所述车辆正常行驶。
9、在一些实施例中,根据所述供电模式及所述第一通信计数值、所述第二通信计数值及所述第三通信计数值中的一个控制所述车辆进入高压冗余模式和/或低压冗余模式,包括:当所述车辆的供电模式为低压供电模式,判断所述转向控制器接收的第一通信计数值在所述第一预设时间内是否满足所述第一预设数量;若是,确定所述转向控制器与所述整车控制器之间的can总线未失效,并控制所述车辆进入低压冗余模式;否则,确定所述转向控制器与所述整车控制器之间的can总线失效,并控制所述车辆进入低压冗余模式。
10、在一些实施例中,确定所述转向控制器与所述整车控制器之间的can总线失效,并控制所述车辆进入低压冗余模式之后,还包括:显示尽快驶离的提示信息。
11、在一些实施例中,确定所述转向控制器与所述整车控制器之间的can总线未失效,并控制所述车辆进入低压冗余模式之后,还包括:显示车辆进入低压冗余模式的提示信息,并显示车辆低压转向的提示声。
12、在一些实施例中,确定所述转向控制器与所述整车控制器之间的信息can总线失效,包括:当所述转向控制器接收的第二通信计数值在第二预设时间内不满足第二预设数量且所述车辆处于上电状态时,确定所述转向控制器与所述整车控制器之间的信息can总线失效。
13、在一些实施例中,确定所述整车控制器与所述直流转交流控制器之间的动力can总线失效,包括:当所述直流转交流控制器的输入电压为额定电压且所述直流转交流控制器接收的第三通信计数值在第三预设时间内不满足第三预设数量时,确定所述整车控制器与所述直流转交流控制器之间的动力can总线失效。
14、在一些实施例中,控制所述车辆进入所述高压冗余模式之后,还包括:当所述整车控制器接收的所述第二通信计数值在第二预设时间内满足第二预设数量,或者,所述车辆处于下电状态,或者,所述直流转交流控制器故障时,控制所述车辆退出所述高压冗余模式。
15、在一些实施例中,控制所述车辆进入所述高压冗余模式之后,还包括:当所述直流转交流控制器接收的所述第三通信计数值在第三预设时间内满足第三预设数量,或者,所述车辆处于下电状态,或者,所述直流转交流控制器故障时,控制所述车辆退出所述高压冗余模式。
16、为了达到上述目的,本发明的第二方面的实施例提出了一种车辆,所述车辆包括:用于如上述实施例所述车辆的控制方法控制所述车辆运行。
17、根据本发明实施例的车辆,根据转向控制器的电压信号确定车辆的供电模式,在不同的供电模式中结合转向控制器的第一通信计数值、整车控制器的第二通信计数值及直流转交流控制器的第三通信计数值中的一个,控制车辆对应进入高压冗余模式和/或低压冗余模式,通过控制车辆进入冗余模式,保证转向电机和制动电机在车辆失效时的电源供给,使得车辆的can网络通信在失效等极端情况下,其转向系统和制动系统仍能按照can网络失效前的状态进行相应控制,保证能够正常运行,从而保障车辆行驶的安全性。
18、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!