无人驾驶纵向车速控制方法、系统、矿卡及电子设备与流程
本发明涉及无人驾驶控制,尤其涉及一种无人驾驶纵向车速控制方法、系统、矿卡及电子设备。
背景技术:
1、目前,针对于无人驾驶车辆的纵向车速控制,一般是基于预先设置的油门与刹车的标定表,来对无人驾驶车辆进行纵向pid(比例proportion integral differential,比例积分微分)控制。
2、然而,无人驾驶矿卡不仅工作环境复杂,且在装载状态为满载时,由于车辆重量变化较大,针对于相同的控制系数,并不能达到相同的控制效果,因而,目前常规的纵向控制方法对于无人驾驶矿卡并不适用。
技术实现思路
1、本发明提供一种无人驾驶纵向车速控制方法、系统、矿卡及电子设备,用以解决现有技术中在对无人驾驶矿卡进行纵向车速控制时,因未对矿卡装载装载进行区分,所造成的车速控制不精确,影响矿卡使用体验的问题。
2、本发明提供一种无人驾驶纵向车速控制方法,包括:
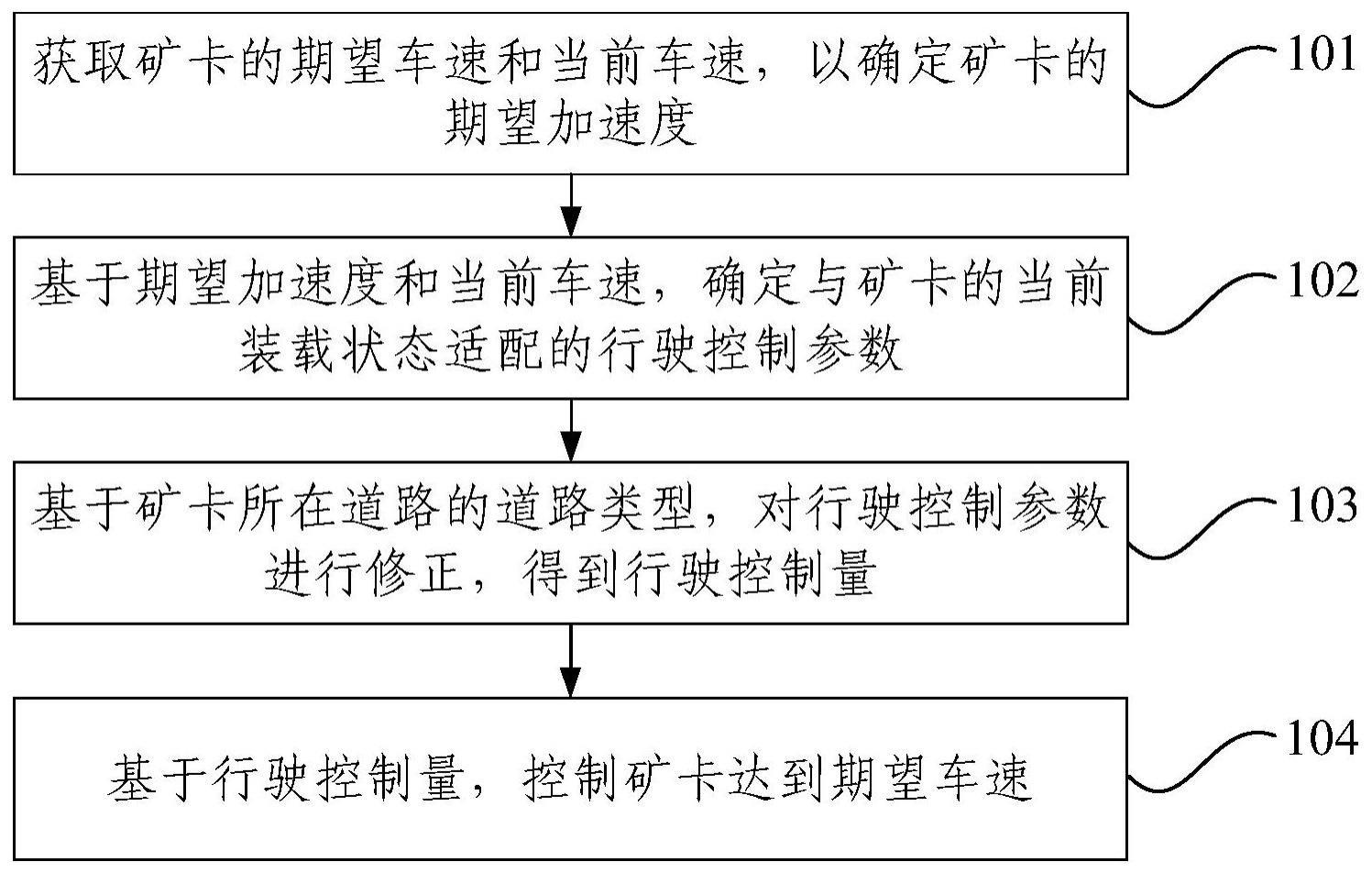
3、获取矿卡的期望车速和当前车速,以确定所述矿卡的期望加速度;
4、基于所述期望加速度和所述当前车速,确定与所述矿卡的当前装载状态适配的行驶控制参数;
5、基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,得到行驶控制量;
6、基于所述行驶控制量,控制所述矿卡达到所述期望车速。
7、根据本发明所述的无人驾驶纵向车速控制方法,所述基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,包括:
8、获取所述矿卡的俯仰角信息;
9、基于所述俯仰角信息,确定所述矿卡所在的当前道路的路面坡度;
10、基于所述当前道路的路面坡度、所述矿卡的当前行驶状态和所述当前装载状态,对所述行驶控制参数进行修正,所述行驶状态包括:前进和倒车。
11、根据本发明所述的无人驾驶纵向车速控制方法,所述道路类型包括:平路、上坡和下坡;
12、所述基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,还包括:
13、基于所述当前道路的路面坡度,确定所述当前道路的所述道路类型;
14、获取所述矿卡的位置信息和待行驶轨迹;
15、基于所述位置信息和所述待行驶轨迹,确定待所述矿卡行驶的前方道路的所述道路类型,所述前方道路为沿所述矿卡的行驶方向,与所述矿卡当前所在位置相距预设距离的位置间的道路;
16、基于所述当前道路的所述道路类型和所述前方道路的所述道路类型,对所述行驶控制参数进行修正。
17、根据本发明所述的无人驾驶纵向车速控制方法,所述行驶控制参数包括:油门控制参数和刹车控制参数;
18、所述基于所述当前道路的所述道路类型和所述前方道路的所述道路类型,对所述行驶控制参数进行修正,包括:
19、在所述当前道路的所述道路类型为平路,且所述前方道路的所述道路类型为上坡时,基于所述前方道路的路面坡度,对所述油门控制参数进行修正;
20、在所述当前道路的所述道路类型为平路,且所述前方道路的所述道路类型为下坡时,基于所述前方道路的路面坡度,对所述刹车控制参数进行修正。
21、根据本发明所述的无人驾驶纵向车速控制方法,所述基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,还包括:
22、在所述当前道路的所述道路类型为平路或上坡,且所述当前车速与所述期望车速的车速差值小于预设速度差值时,将所述油门控制参数减小预设油门调整量。
23、根据本发明所述的无人驾驶纵向车速控制方法,所述基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,还包括:
24、在所述当前道路的所述道路类型为下坡,且所述当前装载状态为满载时,基于所述当前车速,确定刹车调整量;
25、基于所述刹车调整量,对所述刹车控制参数进行修正。
26、根据本发明所述的无人驾驶纵向车速控制方法,所述行驶控制量包括:缓速控制量和刹车控制量;
27、所述基于所述行驶控制量,控制所述矿卡达到所述期望车速,包括:
28、当所述矿卡为燃油矿卡,且所述当前道路的所述道路类型为下坡时,基于所述缓速控制量控制所述燃油矿卡的缓速器动作;
29、在控制所述缓速器动作后,基于所述刹车控制量控制所述燃油矿卡的气动制动器动作;
30、获取所述气动制动器的气压,并在所述气压小于预设气压阈值时,控制所述燃油矿卡停车并对所述气动制动器进行补气,并在确定所述气动制动器补气完成后,控制所述燃油矿卡重新启动行驶。
31、本发明还提供一种无人驾驶纵向车速控制系统,包括:
32、获取模块,用于获取矿卡的期望车速和当前车速,以确定所述矿卡的期望加速度;
33、第一处理模块,用于基于所述期望加速度和所述当前车速,确定与所述矿卡的当前装载状态适配的行驶控制参数;
34、第二处理模块,用于基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,得到行驶控制量;
35、执行模块,用于基于所述行驶控制量,控制所述矿卡达到所述期望车速。
36、本发明还提供一种包括如上所述的无人驾驶纵向车速控制系统的矿卡。
37、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的无人驾驶纵向车速控制方法。
38、本发明提供的一种无人驾驶纵向车速控制方法、系统、矿卡及电子设备,通过获取矿卡的期望车速和当前车速,以确定矿卡的期望加速度,然后基于矿卡的期望加速度和当前车速,确定与矿卡的当前装载状态适配的行驶控制参数,之后,再基于矿卡所在道路的道路类型,对行驶控制参数进行修正,最后基于修正得到的行驶控制量控制矿卡达到期望车速,一方面通过确定与矿卡的当前装载状态适配的行驶控制参数,使得得到的行驶控制参数更加符合矿卡的作业特点,利于提高对矿卡纵向速度控制的精确性;另一方面通过针对于矿卡所在道路的道路类型对行驶控制参数进行修正,使得得到的用于控制矿卡的行驶控制量,更加符合矿卡的实际行驶工况,从而进一步提高了对矿卡纵向速度控制的精确性。
技术特征:
1.一种无人驾驶纵向车速控制方法,其特征在于,包括:
2.根据权利要求1所述的无人驾驶纵向车速控制方法,其特征在于,所述基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,包括:
3.根据权利要求2所述的无人驾驶纵向车速控制方法,其特征在于,所述道路类型包括:平路、上坡和下坡;
4.根据权利要求3所述的无人驾驶纵向车速控制方法,其特征在于,所述行驶控制参数包括:油门控制参数和刹车控制参数;
5.根据权利要求4所述的无人驾驶纵向车速控制方法,其特征在于,所述基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,还包括:
6.根据权利要求4所述的无人驾驶纵向车速控制方法,其特征在于,所述基于所述矿卡所在道路的道路类型,对所述行驶控制参数进行修正,还包括:
7.根据权利要求4所述的无人驾驶纵向车速控制方法,其特征在于,所述行驶控制量包括:缓速控制量和刹车控制量;
8.一种无人驾驶纵向车速控制系统,其特征在于,包括:
9.一种矿卡,其特征在于,包括如权利要求8所述的无人驾驶纵向车速控制系统。
10.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任一项所述的无人驾驶纵向车速控制方法。
技术总结
本发明涉及无人驾驶控制技术领域,提供一种无人驾驶纵向车速控制方法、系统、矿卡及电子设备,其中方法包括:获取矿卡的期望车速和当前车速,以确定矿卡的期望加速度;基于期望加速度和当前车速,确定与矿卡的当前装载状态适配的行驶控制参数;基于矿卡所在道路的道路类型,对行驶控制参数进行修正,得到行驶控制量;基于行驶控制量,控制矿卡达到期望车速。本发明用以解决现有技术中在对无人驾驶矿卡进行纵向车速控制时,因未对矿卡装载装载进行区分,所造成的车速控制不精确,影响矿卡使用体验的问题。
技术研发人员:唐龙飞,李延炬,李赞
受保护的技术使用者:三一智矿科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!