一种车辆动力控制方法、设备及存储介质与流程
本技术涉及新能源汽车动力控制的领域,尤其是涉及一种车辆动力控制方法、设备及存储介质。
背景技术:
1、随着新能源汽车的快速发展,为实现更加高效、环保的能源利用,新能源汽车在车辆动力控制方面也面临着诸多挑战;与传统燃油汽车相比,电动汽车动力系统具有更高的调控精度和更灵活的动力输出方式,但同时也面临着新的问题,在电动汽车运行中,复杂的路况和不确定的环境因素会对车辆的性能和稳定性产生很大的影响,如何进行自适应控制和优化调节,成为提升电动汽车性能和驾乘安全的关键所在。
2、目前,针对新能源汽车动力控制的技术研究也在不断推进,通常采用传感器技术和智能算法结合车辆自身状态信息进行分析,以实现对车辆动力的自适应控制和优化调节。
3、在相关技术中,新能源汽车在缺陷道路上对进行动力控制时,基本遵从避让原则,即通过判断缺陷点位置并结合车辆行驶数据,控制车辆速度及方向实现避开缺陷点的目的;然而当道路中的缺陷较多,且车辆无法避开缺陷点或必须经过缺陷点时,车辆的动力控制策略将受到明显的影响,例如在路面存在较大的凹坑或连续凹坑时,依据避让原则的动力控制策略,无法根据每个凹坑的情况对新能源汽车进行动力控制。
4、如何在道路坑洼较多的场景下,根据每个坑洼对新能源汽车进行动力控制,是在新能源汽车动力控制中亟待解决优化的问题。
技术实现思路
1、为了解决在道路坑洼较多的场景下,根据每个坑洼对新能源汽车进行动力控制的问题,本技术提供一种车辆动力控制方法、设备及存储介质。
2、本技术提供的一种车辆动力控制方法、设备及存储介质采用如下的技术方案:
3、第一方面,一种车辆动力控制方法,包括以下步骤:
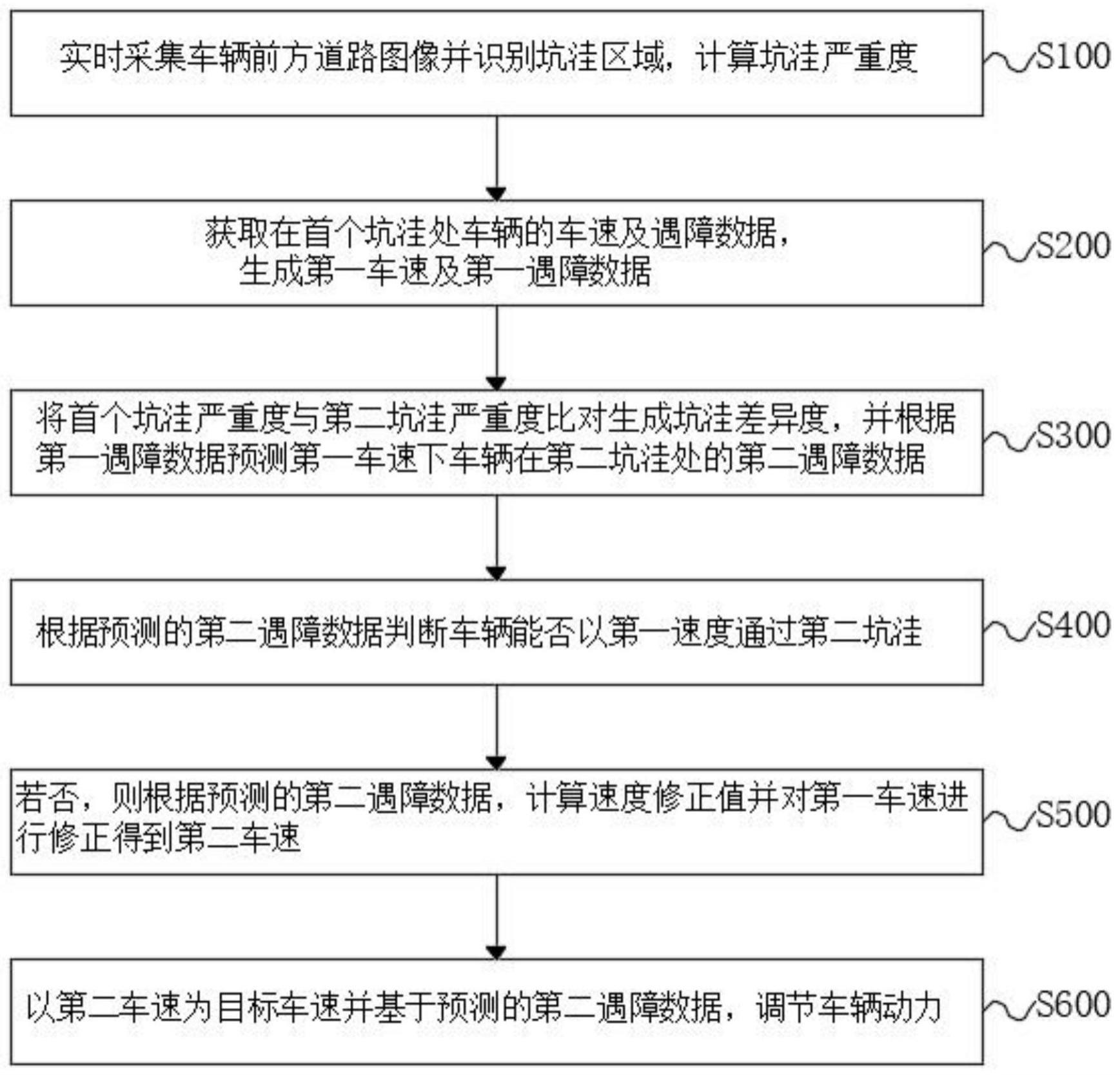
4、实时采集车辆前方道路图像并识别坑洼区域,计算坑洼严重度;
5、获取在首个坑洼处车辆的车速及遇障数据,生成第一车速及第一遇障数据;
6、将首个坑洼严重度与第二坑洼严重度比对生成坑洼差异度,并根据第一遇障数据预测第一车速下车辆在第二坑洼处的第二遇障数据;
7、根据预测的第二遇障数据判断车辆能否以第一速度通过第二坑洼;
8、若否,则根据预测的第二遇障数据,计算速度修正值并对第一车速进行修正得到第二车速;
9、以第二车速为目标车速并基于预测的第二遇障数据,调节车辆动力。
10、在上述任一方案中优选的是,所述实时采集车辆前方道路图像并识别坑洼区域,计算坑洼严重度,包括以下步骤:
11、通过相关技术对道路图像进行预处理,并获取图像中的纹理特征f1、形状特征f2、位置特征f3、周围环境特征f4及深度特征f5,生成图像特征集;
12、对图像特征集中每个特征i设置参考值rref,i,以及对应的特征范围δi和权重系数ωi,并根据公式:构建每个特征i与道路图像中i坑洼的严重度s的关系式,rref,i为参考值处的特征值。
13、在上述任一方案中优选的是,所述对图像特征集中每个特征i设置参考值rref,i,以及对应的特征范围δi和权重系数ωi,并根据公式构建每个特征i与坑洼严重度s的关系式,包括:获取反映每个特征i的图像信息,并通过公式:
14、
15、计算坑洼的严重度;其中,为道路图像中pk区域内灰度值的均方差,为参考图像rref,1中pk区域内灰度值的均方差;和分别表示pk区域在道路图像中的最大和最小横、纵坐标,和分别表示参考图像rref,2中pk区域的最大和最小坐标,δ2是一个常数系数,用于缩放计算得到的坐标变化之差使其具有可比性;(x3,y3)为道路图像中pk区域内最有可能是坑洼的位置坐标,(x3,ref,y3,ref)为参考图像rref,3中pk区域内的坑洼位置坐标,σ为常熟系数,用于控制坑洼位置之差的影响程度;hi+si+vi分别为pk区域内第i种颜色通道的色调、饱和度和亮度,pi为pk区域中第i种颜色通道的直方图统计值与参考值处的差异,δ4是一个常数系数,用于缩放计算得到的直方图之差使其具有可比性;ldw(i,p)为道路图像种像素p的深度信息和路面水平线之间的距离,ldwref(p)为参考值处像素p的深度信息和路面水平线之间的距离;参考图像为预先保存的图像,作为和道路图像进行比较的基准图像;pk为可能为坑洼区域的像素集合,i为道路图像。
16、在上述任一方案中优选的是,所述将首个坑洼严重度与第二坑洼严重度比对生成坑洼差异度,并根据第一遇障数据预测第一车速下车辆在第二坑洼处的第二遇障数据,包括以下步骤:
17、根据道路图像分别计算首个坑洼及第二坑洼的严重度s1、s2,生成坑洼差异度
18、通过坑洼差异度与遇障数据的关系式:计算得到第一车速下车辆在第二坑洼处的第二遇障数据,其中,y2为第二遇障数据,y1为第一遇障数据。
19、在上述任一方案中优选的是,所述根据预测的第二遇障数据判断车辆能否以第一速度通过第二坑洼,包括以下步骤:
20、设置头枕标准瞬时压力p0,计算头枕标准瞬时压力与第二遇障数据中头枕瞬时压力p2的差值;
21、若p0-p2≥0,则以第一车速为车辆在第二坑洼的目标车速;
22、若p0-p2<0,则不能以第一车速为车辆在第二坑洼的目标车速。
23、在上述任一方案中优选的是,所述若否,则根据第二遇障数据,计算速度修正值并对第一车速进行修正得到第二车速,包括以下步骤:
24、通过公式:计算速度修正值δv;其中,p(0-2)为头枕标准瞬时压力p0与第二遇障数据中头枕瞬时压力p2的差值,θ为座椅靠背的倾斜角度,θ0为常数用于调节的速率,为倾斜角度对头枕压力的影响的函数,k1k2m为头枕支撑系统的弹簧常数,k1、k2分别表示座椅和地板之间的初始距离和座椅和驾驶舱背后障碍物之间的初始距离,m为头枕质量,h为头枕距座椅顶部的距离,a为头枕距座椅前缘的距离,c为头枕距座椅中心线的距离,为随时间t头枕受到的瞬时压力的变化情况,r为曲率半径;
25、将速度修正值δv与第一车速v1进行求和得到v2。
26、在上述任一方案中优选的是,所述以第二车速为目标车速并基于预测的第二遇障数据,调节车辆动力,包括:
27、预设置车速调节速率a减,并获取首个坑洼与第二坑洼之间的距离l及车辆通过首个坑洼后的速度v’1;
28、以第二车速v2为目标车速,通过车速调节速率a减对车辆通过首个坑洼后的速度v’1进行调节,并基于首个坑洼与第二坑洼之间的距离l,计算在车辆到达第二坑洼时的实际车速v’2;
29、分析实际车速v’2与第二车速v2的关系,进行动力调节。
30、在上述任一方案中优选的是,所述分析实际车速v’2与第二车速v2的关系,进行动力调节,包括:
31、若v’2≤v2,则以车速调节速率a减对车辆动力进行调节;
32、若v’2>v2,则通过公式计算出v’2条件下满足头枕标准瞬时压力p0时座椅靠背的倾斜角度θ,并调整座椅背靠。
33、第二方面,一种电子设备,包括处理器和存储器;
34、所述存储器存储计算机执行指令;
35、所述处理器执行所述存储器存储的计算机执行指令,使得所述处理器执行如上述任一项所述的方法。
36、第三方面,一种计算机存储介质,所述存储介质存储有至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行以实现如上述任一项所述的方法。
37、综上所述,本技术包括以下至少一种有益技术效果:
38、本技术提供的车辆动力控制方法,能够在道路坑洼较多的场景,根据每一个坑洼对车辆匹配一个合理的动力控制策略,可以根据车辆对一个坑洼的稳定性反馈,预测车辆通过下一个坑洼的稳定性,并相应做出动力调整;
39、通过预设置车速调节速率,能够提高车辆经过坑洼较多的道路时整体的平顺性,可以实现在保证车辆安全性的同时,提高整体动力控制中速度的稳定性,避免了急走急停。
- 还没有人留言评论。精彩留言会获得点赞!