一种牵引系统电路及其供电模式切换方法与流程
本技术涉及城轨车辆牵引系统,尤其涉及一种牵引系统电路及其供电模式切换方法。
背景技术:
1、有轨电车是当今世界上发展最为迅猛的轨道交通形式,具有运量大、成本低、污染小、能耗少、准点运行、安全性高、造型美观等优点,是市区交通、城乡轨交和景点的重要载体。
2、有轨电车运营线路灵活,不需要地面高架封闭线路,也不需要地下隧道,沿城市主干道、人口密集区、城乡联运主干道、景点旅游线路等运营。有轨电车线路与市内道路有很多平交路口,可采用独立路权和混合路权,而郊区线路的交叉路口相对较少。因地面线路复杂,同时由于城市美观的需要,有轨电车在平交路口密集区多采用车载储能系统供电即无网区,如动力电池或超级电容等,而在非重点区域采用架空网的方式供电,即有网区。
3、有网区内,电网给通过受电弓给车辆牵引系统、辅助电源系统供电,同时,储能系统容量不足时也通过充电设备从电网取电充电,以满足无网区运营用电需求。无网区段,受电弓脱离供电网,车辆牵引系统、辅助电源系统转为车载储能系统供电,储能系统可以是锂电池、超级电容等,由于能量限制,车辆可减载运行。车载储能系统供电和电网供电的切换是新能源车辆的重点和难点。
4、常用的新能源车辆电路拓扑如图1所示。现有的拓扑结构和切换方式存在以下缺点:集成度低,需要采用单独的双向dc/dc变换设备,且变换器独立于储能系统和牵引系统,dc/dc控制器、bms、tcu之间互连线复杂,无法进行可靠的一体化控制;车辆转换供电模式前,牵引系统、辅助电源系统高压电源断点停机,切换完成后重新运行,车辆动力性能受到限制,车载空调等停机影响乘客舒适度;受电弓需要降弓,可能会存在拉弧等损伤受电弓和接触网,影响寿命,频繁的vvvf预充电动作增加了系统的故障率,降低了接触器寿命;现有技术提出了进网和离网方法,只提出了进出时序并未有实质性方法,仅有的降功运行在实际运行中也有诸多限制,且存在电网和电池电压差较大造成冲击、短路等事故的风险。
5、现行的新能源车辆供电模式转换技术有其局限性,限制了新能源系统在轨道交通的进一步推广,dcdc变换器和vvvf无法有效形成整体,切换时的供电中断影响列车动力和乘客舒适性,频繁的开关动作降低了器件的使用寿命,部分无缝切换方法并不能解决现有问题。
6、因此,一种有效解决有轨电车储能系统和电网供电无缝切换的方法变得更加迫切。
技术实现思路
1、本技术实施例提供了一种牵引系统电路及其供电模式切换方法,以至少解决了牵引系统集成度低、车辆供电模式切换使车辆动力性能受到限制、系统故障率高及接触器寿命低等问题。
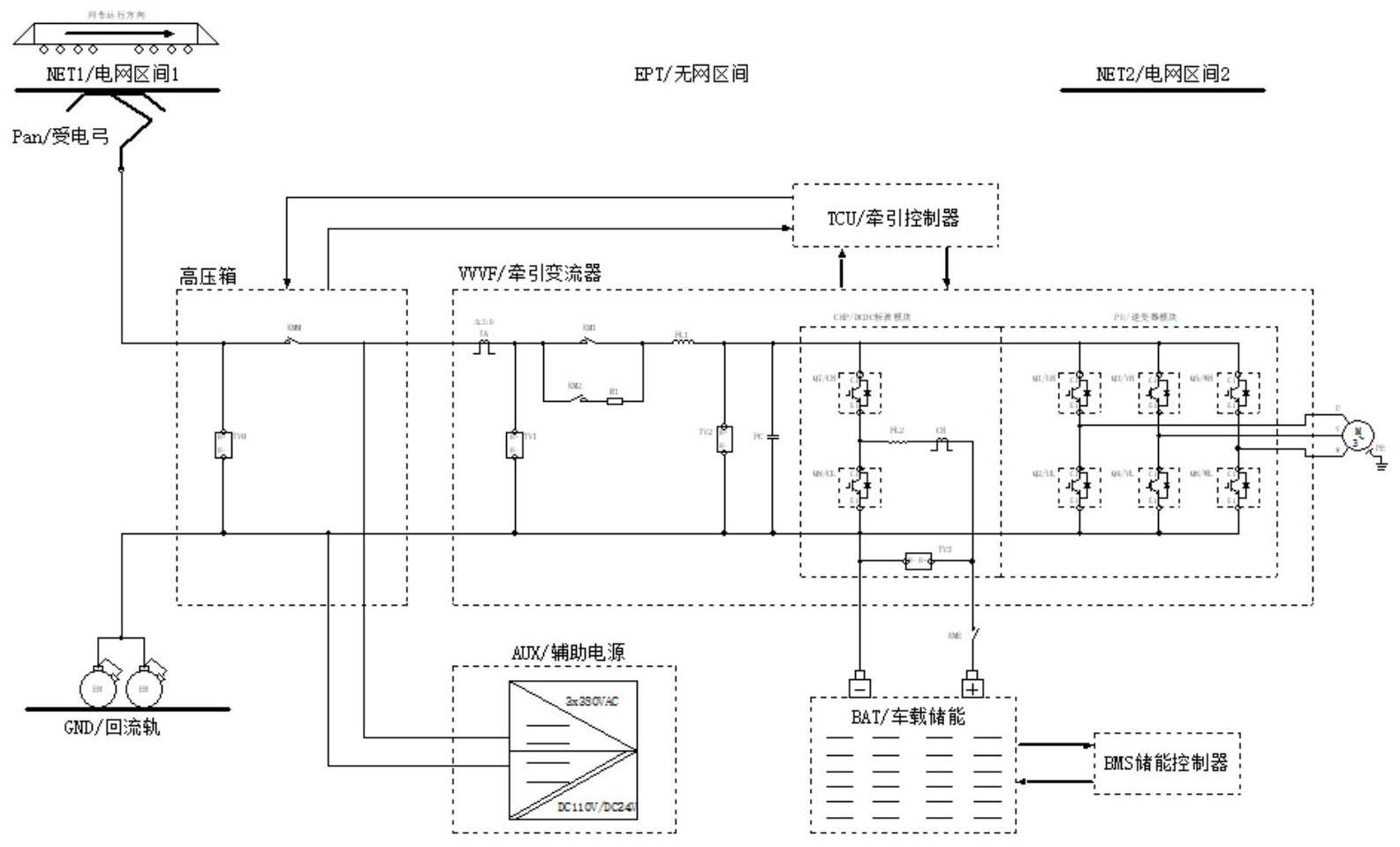
2、本发明提供了一种牵引系统电路及其供电模式切换方法,所述牵引系统电路包括:
3、高压箱,所述高压箱包括kmm接触器;
4、牵引变流器模块,所述牵引变流器模块一端与所述kmm接触器连接,所述牵引变流器模块包括dc/dc斩波模块及逆变器模块,所述dc/dc斩波模块集成到所述逆变器模块;
5、tcu牵引控制器,所述tcu牵引控制器分别与所述牵引变流器模块、所述高压箱连接,所述tcu牵引控制器检测高压箱数据及牵引变流器模块数据,根据所述高压箱数据及所述牵引变流器模块数据调整所述kmm接触器状态;
6、车载储能模块,与所述dc/dc斩波模块连接;
7、车辆从有网区进入无网区时,所述dc/dc斩波模块根据车辆状态转换成boost状态或buck状态,电网和所述车载储能模块并行给所述车辆供电,所述tcu牵引控制器根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述牵引变流器模块数据是否过零点后,根据判断结果控制所述kmm接触器使其打开后,所述电网供电中断,车载储能模块继续给所述车辆供电;
8、所述车辆从所述无网区进入所述有网区时,所述dc/dc斩波模块根据所述车辆状态转换成boost状态或buck状态,所述车载储能模块给所述车辆供电,所述tcu牵引控制器根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述牵引变流器模块数据与所述高压箱数据是否过所述零点后,根据判断结果控制所述kmm接触器使其闭合后,所述车载储能模块供电中断,所述电网给所述车辆供电。
9、上述的牵引系统电路中,所所述高压箱还包括:
10、受电弓电压传感器tv0,所述受电弓电压传感器tv0与所述kmm接触器连接,所述tv0传感器采集所述高压箱数据,并将所述高压箱数据传输到所述tcu牵引控制器,所述tcu牵引控制器将所述高压箱数据传输到所述牵引变流器模块,其中,所述高压箱数据包括受电弓电压up。
11、上述的牵引系统电路中,所述牵引变流器模块还包括:
12、网流传感器ta,所述网流传感器ta采集第一牵引变流器模块数据,所述第一牵引变流器模块数据包括电网电流实际值in;
13、网压传感器tv1,所述网压传感器tv1与所述网流传感器ta的一端连接,所述网压传感器tv1采集第二牵引变流器模块数据,所述第二牵引变流器模块数据包括所述fc电压实际值ufc与所述电网电压实际值un。
14、上述的牵引系统电路中,所述dc/dc斩波模块包括:
15、电流传感器ch,所述电流传感器ch采集第三牵引变流器数据,其中,所述第三牵引变流器数据包括蓄电池电流ib。
16、上述的牵引系统电路中,所述dc/dc斩波模块还包括dc/dc驱动器、电流内环控制器、电压控制外环、电流控制外环及状态转换开关;
17、模式开关s2及目标电压选择开关s3;
18、其中,所述电流内环控制器的一端设有所述dc/dc工作模式开关s1,所述电流内环控制器的另一端设有外环控制模式开关s2,所述电流控制外环设有所述目标电压选择开关s3。
19、本发明还提供供电模式切换方法,所述供电模式切换方法包括:
20、电网供电模式切换成储能系统供电模式步骤:车辆从有网区进入无网区时,所述车辆收到有网区进入无网区信号后,根据车辆状态,将dc/dc驱动器状态转换为boost状态或buck状态后,根据基于目标电流和斜坡函数的双闭环控制算法判断电网电流实际值in是否过零点,所述tcu牵引控制器根据第一判断结果控制kmm接触器使其打开后,完成由电网供电模式到储能系统供电模式的转换;
21、储能系统供电模式切换成电网供电模式步骤:车辆从所述无网区进入所述有网区时,所述车辆收到无网区进入有网区信号后,根据基于目标电流和斜坡函数的双闭环控制算法判断第二牵引变流器模块数据与受电弓电压up的目标电压差是否过所述零点,所述tcu牵引控制器根据第二判断结果控制kmm接触器使其闭合后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述tcu牵引控制器根据第三判断结果将所述dc/dc驱动器状态转换为所述buck状态后,完成由所述储能系统供电模式到所述电网供电模式的转换。
22、上述的供电模式切换方法中,所述电网供电模式切换成储能系统供电模式步骤还包括:
23、当所述车辆状态为牵引状态或惰性状态时,所述kmm接触器闭合,所述tcu牵引控制器通过dc/dc工作模式开关s1将所述dc/dc驱动器状态转换为所述boost状态、通过外环控制模式开关s2启用电压控制外环、通过目标电压选择开关s3将稳定阶段的目标电压设置为额定电压后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述tcu牵引控制器根据所述第一判断结果控制kmm接触器使其打开后,完成由所述电网供电模式到所述储能系统供电模式的转换。
24、上述的供电模式切换方法中,所述电网供电模式切换成储能系统供电模式步骤还包括:
25、当所述车辆状态为制动状态时,所述kmm接触器闭合,所述tcu牵引控制器通过所述dc/dc工作模式开关s1将所述dc/dc驱动器状态转换为所述buck状态、通过所述外环控制模式开关s2启用所述电流控制外环、通过所述目标电压选择开关s3将所述稳定阶段的目标电压设置为所述额定电压后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述tcu牵引控制器根据第三判断结果通过所述dc/dc工作模式开关s1将所述dc/dc驱动器状态转换为所述boost状态、通过所述外环控制模式开关s2启用所述电压控制外环后,控制kmm接触器使其打开后,完成由所述电网供电模式到所述储能系统供电模式的转换。
26、上述的供电模式切换方法中,所述储能系统供电模式切换成电网供电模式步骤还包括:
27、当所述车辆状态为牵引状态或惰性状态时,所述kmm接触器打开,所述tcu牵引控制器通过所述dc/dc工作模式开关s1将所述dc/dc驱动器状态转换为所述boost状态、通过所述外环控制模式开关s2采用所述电压控制外环、通过所述目标电压选择开关s3采用受电弓电压up作为目标跟随电压,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述第二牵引变流器模块数据与所述受电弓电压up的目标电压差是否过所述零点,所述tcu牵引控制器根据所述第二判断结果控制kmm接触器使其闭合后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述tcu牵引控制器根据第三判断结果将所述dc/dc驱动器状态转换为所述buck状态后,完成由所述储能系统供电模式到所述电网供电模式的转换。
28、上述的供电模式切换方法中,所述储能系统供电模式切换成电网供电模式步骤还包括:
29、当所述车辆状态为所述制动状态时,通过所述dc/dc工作模式开关s1将所述dc/dc驱动器转换为所述buck状态、通过所述外环控制模式开关s2采用所述电流控制外环、通过所述目标电压选择开关s3采用受电弓电压up作为目标跟随电压,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述第二牵引变流器模块数据与所述受电弓电压up的目标电压差是否过所述零点,所述tcu牵引控制器根据所述第二判断结果控制kmm接触器使其闭合后,根据所述基于目标电流和斜坡函数的双闭环控制算法判断所述电网电流实际值in是否过所述零点,所述tcu牵引控制器根据所述第三判断结果将所述dc/dc驱动器状态转换为所述boost状态,完成由所述储能系统供电模式到所述电网供电模式的转换。
30、相比于相关技术,本发明提出的一种牵引系统电路及其供电模式切换方法,深入分析现阶段混合供电列车的特点,提出了集成式新能源牵引系统电气拓扑,在现有技术中具有更优的集成度;本发明充分考虑车辆运行特性,创造性提出了各状态下列车供电模式无缝切换方法,对列车性能影响降到了最低;根据车辆运行状态和电源无缝切换特征,提出了基于目标模式的电流/电压双环控制算法,统筹牵引系统、dc/dc、储能系统、车辆状体为一体实现了整体控制;考虑到切换时系统稳定性,提出了改善电流冲击的切换方法,利用斜坡函数在有效时间内使目标电流越过零点。
31、本技术的一个或多个实施例的细节在以下附图和描述中提出,以使本技术的其他特征、目的和优点更加简明易懂。
- 还没有人留言评论。精彩留言会获得点赞!