一种交通场景下基于自适应目标的向量化轨迹预测方法
本发明涉及自适应目标生成和向量化轨迹预测的,尤其是指一种交通场景下基于自适应目标的向量化轨迹预测方法。
背景技术:
1、随着人工智能技术的快速发展,智能化交通系统的研究和应用已经成为一个热门领域。自动驾驶、智能交通、行人识别、物体跟踪等应用中,轨迹预测作为其中的一个重要环节,受到了越来越多的关注。传统的交通场景下轨迹预测方法主要基于物理模型或统计学方法,这些方法需要大量的先验知识和手工特征提取,无法应对复杂的交通场景。而随着深度学习技术的发展,越来越多的基于深度学习的轨迹预测方法受到了广泛的关注。这些方法能够自动学习数据中的特征,避免了手工特征提取的繁琐过程,同时也具有更高的预测准确率和鲁棒性。
2、然而,在实际应用中,交通场景的复杂性和多变性仍然是轨迹预测面临的挑战。交通参与者之间的相互作用和行为规律,受到许多因素的影响,比如车速、道路限速、天气、路况等。因此,如何准确地预测交通参与者的运动轨迹,成为了一个复杂而具有挑战性的问题。
技术实现思路
1、本发明的目的在于克服现有技术的缺点与不足,提出了一种交通场景下基于自适应目标的向量化轨迹预测方法,能够自适应地学习历史轨迹与地图元素之间的复杂关系,从而生成自适应的运动目标,进而提高轨迹预测的准确性和鲁棒性,能够更好地应对复杂的交通环境,为自动驾驶、智能交通、机器人导航以及人体运动预测等领域提供可靠和高效的技术支持。
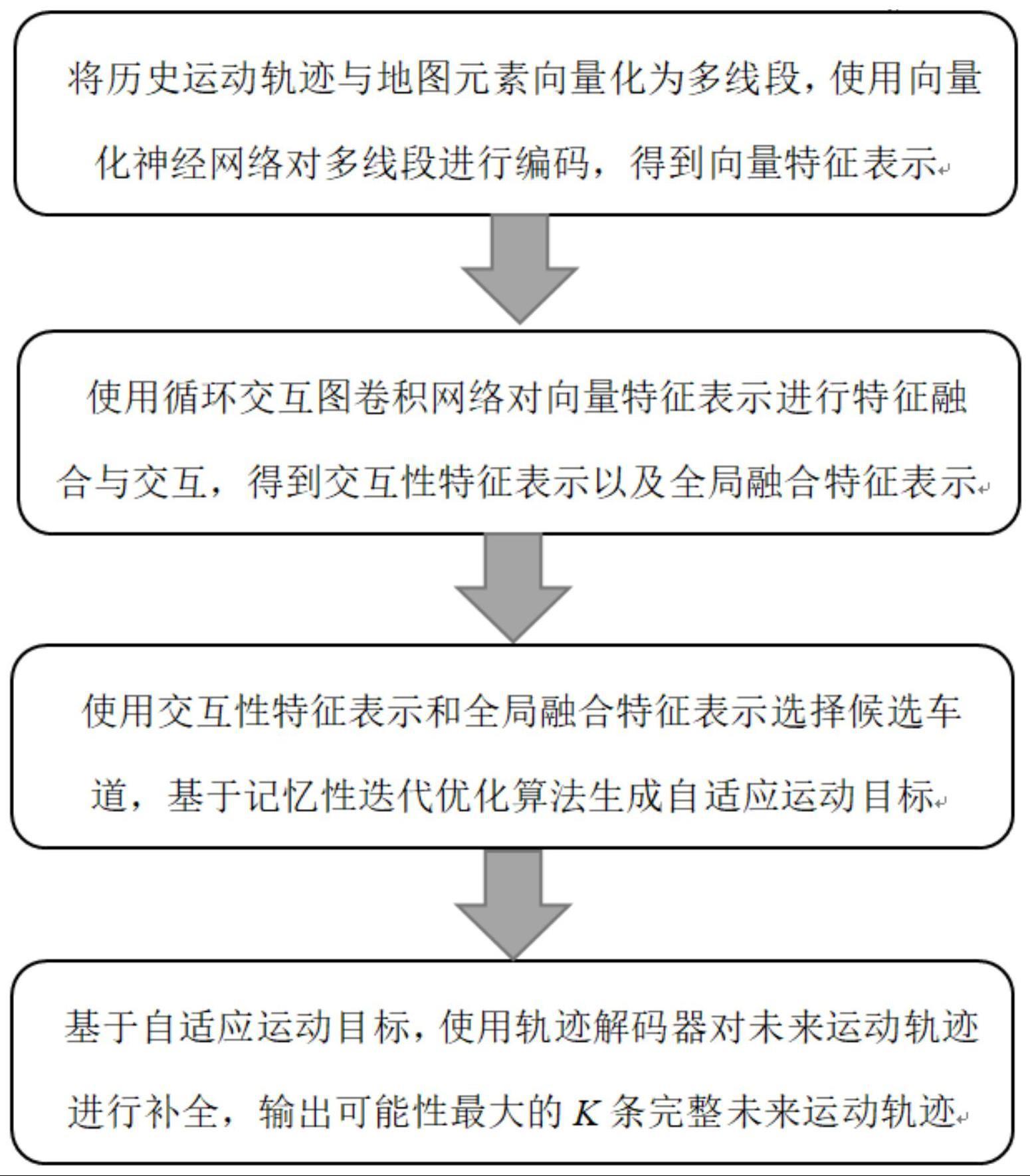
2、为实现上述目的,本发明所提供的技术方案为:一种交通场景下基于自适应目标的向量化轨迹预测方法,包括以下步骤:
3、1)将运动主体的历史运动轨迹与地图元素通过向量化过程近似为多线段,然后使用向量化神经网络对多线段进行编码,得到向量特征表示;
4、2)使用循环交互图卷积网络对向量特征表示进行特征融合与交互,得到更新后的交互性特征表示以及全局融合特征表示,其中,所述循环交互图卷积网络由多层交叉注意力网络层、多层自注意力网络层以及全局图卷积层构成;
5、3)使用交互性特征表示和全局融合特征表示选择候选车道,然后在候选车道上基于记忆性迭代优化算法生成自适应运动目标,其中,所述记忆性迭代优化算法是基于hillclimbing算法的迭代优化算法;
6、4)基于生成的自适应运动目标,使用轨迹解码器对未来运动轨迹进行补全,并输出可能性最大的k条完整未来运动轨迹。
7、进一步,在步骤1)中,运动主体是指交通场景中物理位置会随时间而变化的主体,历史运动轨迹是指运动主体能被观测到的2维位置坐标序列,表示为:
8、
9、式中,sj是指第j个运动主体的运动轨迹点序列,共有j个运动主体,表示为2维的向量,表示2维的向量,表示维度,和是运动主体j在t时刻的在像素坐标系下的x轴和y轴分量,共有t个时间步;地图元素是指道路场景中的静态元素,包括道路中心线、十字路口或交通灯;地图元素和历史运动轨迹都能够近似为向量序列:对于地图元素,选择起点和方向,在同一空间距离上均匀采样样条曲线上的关键点,并将相邻的关键点顺序连接成向量;对于历史运动轨迹,从t=1开始以固定的时间间隔采样关键点,并将它们连接成向量;向量化过程是连续轨迹、地图元素和向量集合之间的一对一映射,每个向量集合构成了一个多线段;为了使用向量化神经网络对多线段进行编码处理,将属于多线段pj的每个向量vi视为图中的一个节点,节点特征表示为:
10、
11、式中,和分别表示向量起始点与结束点的坐标,ai表示节点vi对应的属性信息,包括对象类型、轨迹的时间戳或车道的道路特征类型和速度限制,j是pj的数字索引,表示节点vi属于多线段pj;为了使得输入节点特征不受元素位置的影响,对所有向量的坐标进行归一化;然后使用向量化神经网络对多线段进行编码,得到向量特征表示,这一过程表示为:
12、fs=evec(ps)
13、fd=evec(pd)
14、式中,evec(·)表示向量化神经网络,它是由多层图卷积层构成,和分别表示静态向量特征表示和动态向量特征表示,ns和nd分别表示静态元素和动态元素的数量,dc表示每个元素的特征长度,ps和pd分别表示静态元素和动态元素对应的多线段集合。
15、进一步,所述步骤2)包括以下步骤:
16、2.1)令查询query=fs,键key=fd,使用query和key做交叉注意力计算,即使用动态向量特征表示更新静态向量特征表示,得到q',表示为:
17、q'=fca(query,key)+query
18、式中,q'表示更新后的静态向量特征表示,fca(·,·)表示交叉注意力网络层;此步将实时交通信息引入车道节点;
19、2.2)使用q'做自注意力计算,更新静态向量特征表示得到qnew,表示为:
20、qnew=fsa(q',q')+q'
21、式中,qnew表示更新后的静态向量特征表示,fsa(·,·)表示自注意力网络层;
22、2.3)使用key和qnew做交叉注意力计算,用更新后的静态向量特征表示更新动态向量特征表示得到knew,表示为:
23、knew=fca(key,qnew)+key
24、式中,knew表示更新后的动态向量特征表示;
25、2.4)根据需要对步骤2.1)~2.3)循环n轮后,其中在每一轮特征更新前,令query=fs,new,fs,new为上一轮更新后的静态向量特征表示,key=fd,new,fd,new为上一轮更新后的动态向量特征表示;这里将最后一轮更新后的静态向量特征表示和动态向量特征表示称作静态交互性特征表示与动态交互性特征表示,记为fs,social和fd,social;然后将fs,social和fd,social输入到全局图卷积层,生成全局融合特征表示,表示为:
26、fglobal=fglobal(fs,social,fd,social)
27、式中,fglobal表示全局融合特征表示,fglobal(·,·)表示全局图卷积层;将步骤2.1)~2.4)的各网络层进行堆叠,即构成循环交互图卷积网络。
28、进一步,所述步骤3)包括以下步骤:
29、3.1)将静态交互性特征表示fs,social、动态交互性特征表示fd,social以及全局融合特征表示fglobal拼接在一起得到场景特征表示fe,表示为:
30、fe=concat(fs,social,fd,social,fglobal)
31、式中,fe表示场景特征表示,concat(·,·)表示沿特征长度方向的张量拼接操作;
32、3.2)使用交叉注意力评分模块对预设范围内所有可能的车道进行评分,从而预测运动主体最有可能会使用的车道,选出可能性最高的一些车道作为候选车道;评分的计算过程表示为:
33、scorel=softmax(σ(ωl(wlfl,fl)))
34、式中,fl=fca(fs,social,fglobal),为车道特征表示,是基于交叉注意力机制使用静态交互性特征表示与全局融合特征表示计算得到,scorel表示车道l的得分,即使用车道l的可能性大小,σ(·)表示非线性激活函数,softmax(·)作为归一化函数,ωl和wl分别为对应的全连接层以及变换网络的权重矩阵,变换网络由多层全连接层构成;通过对scorel从小到大排序,能够得到评分最高的kl条车道;
35、3.3)将得到的评分最高的kl条车道作为候选车道,基于记忆性迭代优化算法生成自适应运动目标;记忆性迭代优化算法的过程如下:首先,在每一条候选车道上,以道路中心线为中心等距离采样一些候选目标点,得到候选目标点的集合gi表示第i个候选目标点,是一个二维的坐标点,ng表示候选目标点的数量;然后使用一个目标评分模块对每一个候选目标点进行评分,评分过程表示为:
36、scoreg=softmax(σ(ωgconcat(wgfg,fg)))
37、式中,finit为候选目标点的二维坐标经过全连接层后得到的隐空间特征表示,fg=fca(finit,fglobal),为候选目标点特征表示,是基于交叉注意力机制使用候选目标点的隐空间特征表示与全局融合特征表示计算得到,scoreg表示候选目标g的得分,即候选目标g的可能性大小,ωg和wg分别为对应的全连接层以及变换网络的权重矩阵,变换网络由多层全连接层构成;通过对scoreg从小到大排序,能够得到评分最高的kg个候选目标点;最后,计算评分最高的kg个候选目标点与真实目标点之间的误差,使用hill climbing算法优化候选目标点,最终得到最优的自适应运动目标。
38、进一步,在步骤4)中,基于生成的自适应运动目标,使用一个由多层全连接层构成的轨迹解码器来对未来运动轨迹进行补全,轨迹解码器的输出将会是k条完整的轨迹序列表示第k条完整的未来运动轨迹,第k条完整的未来运动轨迹补全过程表示为:
39、
40、式中,gk表示第k个自适应运动目标,φ(·)是对自适应运动目标进行重映射的变换编码器,由多层全连接层构成,mlp(·)表示一个前馈神经网络,由多层全连接层构成。
41、本发明与现有技术相比,具有如下优点与有益效果:
42、1、本发明通过循环交互图卷积对向量特征表示进行特征融合与交互,进而得到交互性特征表示以及全局融合特征表示,能够自适应地学习了交通场景中动态因素与静态因素的复杂关系,提高了轨迹预测的准确性和鲁棒性。
43、2、不同于以往方法直接预测候选目标点的做法,本发明使用交叉注意力机制为候选车道与候选目标点进行评分,并使用记忆性迭代优化算法不断优化候选目标点的选择,能够自适应地生成最优的潜在目标点。
44、3、与传统的基于栅格化地图的方法不同,本发明采用向量化的方法对场景元素进行编码,能够大幅地减少计算资源的使用,提高算法的计算速度。
- 还没有人留言评论。精彩留言会获得点赞!