车辆的控制方法、装置、存储介质和车辆与流程
本发明涉及车辆领域,具体而言,涉及一种车辆的控制方法、装置、存储介质和车辆。
背景技术:
1、目前,在当前的障碍物探测过程中,有的探测方法采用单一传感器进行障碍物探测,准确性较低,有的探测方法虽然采用多传感器进行障碍物探测,但是对于很多复杂场景下的探测,对车辆的决策控制并不准确,而且大部分文献只针对于主动情况,仅考虑前方障碍物,从而进行紧急制动,并未考虑后方车辆是否会由于前车紧急制动而受到影响,对于被动情况,如果后方车辆不受控制,也并未考虑到,从而导致车辆决策控制的效率较低的技术问题。
2、针对上述车辆决策控制的效率较低的技术问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种车辆的控制方法、装置、存储介质和车辆,以至少解决车辆决策控制的效率较低的技术问题。
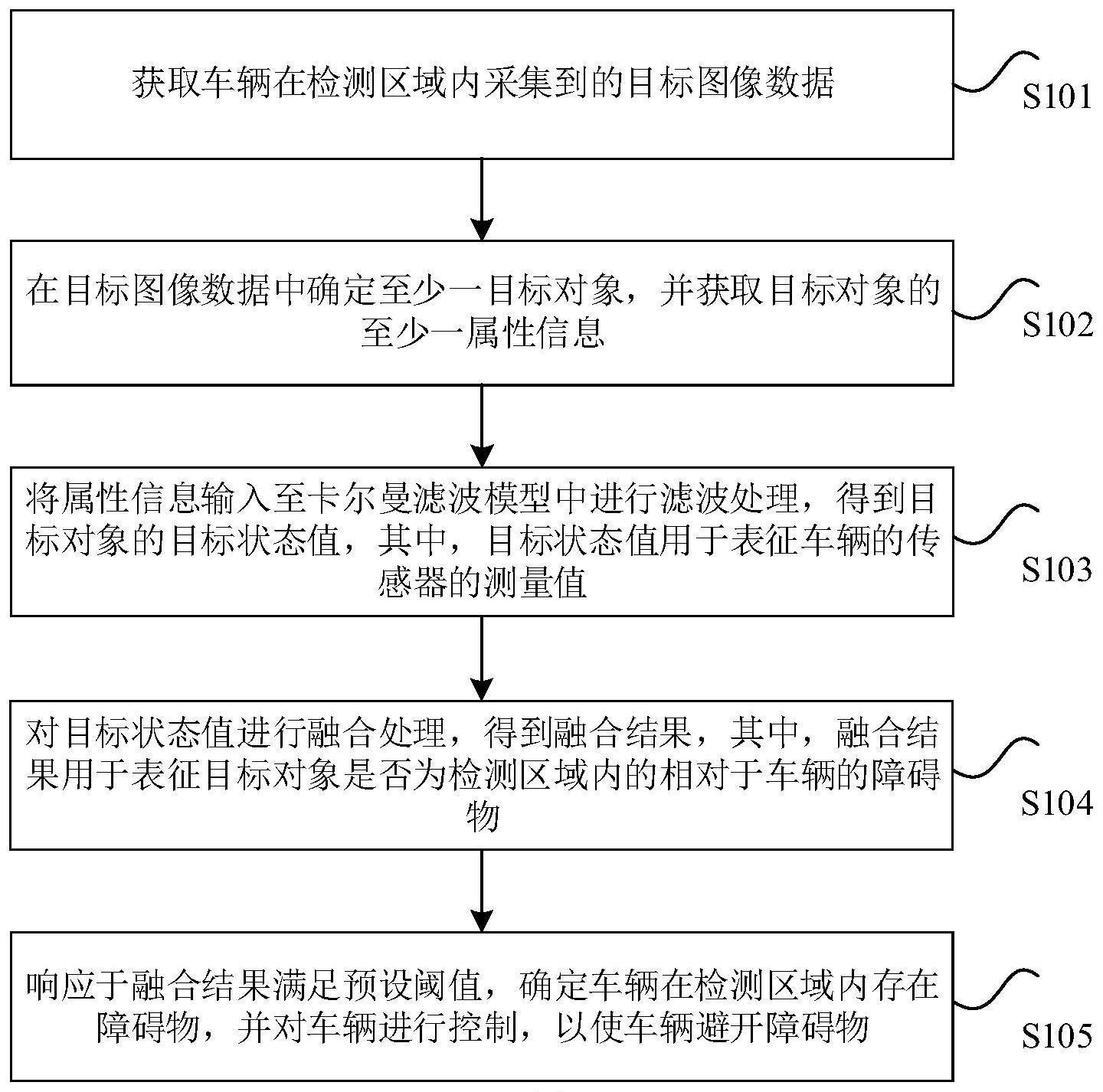
2、根据本发明实施例的一个方面,提供了一种车辆的控制方法。该方法可以包括:获取车辆在检测区域内采集到的目标图像数据;在目标图像数据中确定至少一目标对象,并获取目标对象的至少一属性信息;将属性信息输入至卡尔曼滤波模型中进行滤波处理,得到目标对象的目标状态值,其中,目标状态值用于表征车辆的传感器的测量值;对目标状态值进行融合处理,得到融合结果,其中,融合结果用于表征目标对象是否为检测区域内的相对于车辆的障碍物;响应于融合结果满足预设阈值,确定车辆在检测区域内存在障碍物,并对车辆进行控制,以使车辆避开障碍物。
3、可选地,对目标状态值进行融合处理,得到融合结果,包括:获取目标状态值的权重值;基于权重值与目标状态值的乘积,确定融合结果。
4、可选地,响应于融合结果满足预设阈值,确定车辆在检测区域内存在障碍物,并对车辆进行控制,以使车辆避开障碍物,包括:确定障碍物相对于车辆所处的方向,并获取车辆与障碍物之间的距离;响应于障碍物处于车辆的前方、左方或右方,距离小于第一预设距离、且距离大于第二预设距离,调节车辆的档位信息、加速度信息和油门信息,并将档位信息、加速度信息和油门信息发送至车辆的后方车辆,其中,第二预设距离小于第一预设距离;响应于障碍物处于车辆的前方、左方或右方,且距离小于第二预设距离,对车辆进行制动处理,并将车辆的制动信息发送至后方车辆。
5、可选地,响应于融合结果满足预设阈值,确定车辆在检测区域内存在障碍物,并对车辆进行控制,以使车辆避开障碍物,还包括:响应于障碍物处于车辆的后方,且距离小于第一预设距离、且距离大于第二预设距离,调节档位信息和油门信息,并将档位信息和油门信息发送至后方车辆;获取后方车辆响应于档位信息和油门信息而发送的反馈信息,其中,反馈信息用于表征后方车辆的自动驾驶系统正常工作。
6、可选地,除获取后方车辆响应于档位信息和油门信息而发送的反馈信息之外,该车辆的控制方法还包括:对后方车辆进行制动处理。
7、可选地,该车辆的控制方法还包括:响应于融合结果未满足预设阈值,确定车辆在检测区域内不存在障碍物,保持车辆的档位信息、加速度信息和油门信息。
8、根据本发明实施例的一个方面,提供了一种车辆的控制装置。该装置可以包括:获取单元,用于获取车辆在检测区域内采集到的目标图像数据;确定单元,用于在目标图像数据中确定至少一目标对象,并获取目标对象的至少一属性信息;滤波单元,用于将属性信息输入至卡尔曼滤波模型中进行滤波处理,得到目标对象的目标状态值,其中,目标状态值用于表征车辆的传感器的测量值;融合单元,用于对目标状态值进行融合处理,得到融合结果,其中,融合结果用于表征目标对象是否为检测区域内的相对于车辆的障碍物;控制单元,用于响应于融合结果满足预设阈值,确定车辆在检测区域内存在障碍物,并对车辆进行控制,以使车辆避开障碍物。
9、根据本发明实施例的另一方面,还提供了一种计算机可读存储介质。该计算机可读存储介质包括存储的程序,其中,在程序运行时控制计算机可读存储介质所在设备执行本发明实施例的车辆的控制方法。
10、根据本发明实施例的另一方面,还提供了一种处理器。该处理器用于运行程序,其中,程序被该处理器运行时执行本发明实施例的车辆的控制方法。
11、根据本发明实施例的另一方面,还提供了一种车辆,车辆用于执行本发明实施例的车辆的控制方法。
12、在本发明实施例中,获取车辆在检测区域内采集到的目标图像数据,在该目标图像数据中可以确定至少一目标对象,并获取目标对象的至少一属性信息,将获取的属性信息输入至卡尔曼滤波模型中进行滤波处理,可以得到目标对象的目标状态值,也即,可以得到传感器的测量值,对传感器的测量值进行融合处理,可以得到融合结果,对融合结果是否满足预设阈值进行判断,如果融合结果满足预设阈值,则确定车辆在检测区域内存在障碍物,并对车辆进行控制,以使车辆避开障碍物,从而达到了可以对目标障碍物进行精准探测的目的,解决了车辆决策控制的效率较低的技术问题,实现了可以提高车辆决策控制的效率的技术效果。
技术特征:
1.一种车辆的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,对所述目标状态值进行融合处理,得到所述融合结果,包括:
3.根据权利要求1所述的方法,其特征在于,响应于所述融合结果大于预设阈值,确定所述车辆在所述检测区域内存在所述障碍物,并对所述车辆进行控制,包括:
4.根据权利要求3所述的方法,其特征在于,响应于所述融合结果大于预设阈值,确定所述车辆在所述检测区域内存在所述障碍物,并对所述车辆进行控制,还包括:
5.根据权利要求4所述的方法,其特征在于,除获取所述后方车辆响应于所述档位信息和所述油门信息而发送的反馈信息之外,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.一种车辆的控制装置,其特征在于,包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至6中任意一项所述车辆的控制方法。
9.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序被所述处理器运行时执行权利要求1至6中任意一项所述车辆的控制方法。
10.一种车辆,其特征在于,所述车辆用于执行权利要求1至6中任意一项所述车辆的控制方法。
技术总结
本发明公开了一种车辆的控制方法、装置、存储介质和车辆。该方法包括:获取车辆在检测区域内采集到的目标图像数据;在目标图像数据中确定至少一目标对象,并获取目标对象的至少一属性信息;将属性信息输入至卡尔曼滤波模型中进行滤波处理,得到目标对象的目标状态值,其中,目标状态值用于表征车辆的传感器的测量值;对目标状态值进行融合处理,得到融合结果,其中,融合结果用于表征目标对象是否为检测区域内的相对于车辆的障碍物;响应于融合结果满足预设阈值,确定车辆在检测区域内存在障碍物,并对车辆进行控制,以使车辆避开障碍物。本发明解决了车辆决策控制的效率较低的技术问题。
技术研发人员:孙瑀擎,王建国,张东波,景海娇,王雪良,孟凡华,成春雨,王椿龙,郑嘉全,李浩滇,郭劲翎
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!