无人驾驶车辆的控制方法及其控制装置与流程
本技术涉及无人驾驶领域,具体而言,涉及一种无人驾驶车辆的控制方法、无人驾驶车辆的控制装置、计算机可读存储介质以及无人驾驶车辆的控制系统。
背景技术:
1、近些年来,随着“智慧工业”理念的提出,智慧矿山应运而生,无人驾驶矿卡则是智慧矿山的关键一环。自动驾驶实现深度与运行环境的复杂度成正相关,矿区以及港口等由于运行工况较为固定,在实现自动驾驶有着先天独特的优势,必然是最先实现自动驾驶规模化上的产业。矿卡由于体积大且吨位重,一旦出现安全事故时轻则影响生产进度,重则造成人员伤亡,所以在实现自动驾驶时对安全保护功能的设计一直是重中之重。
2、目前,矿卡在自动驾驶模式下,均是由车载线控控制器接受来自自动驾驶平台的油门、刹车、转向以及举升等指令信号,再由线控控制器输出指令给相应的执行机构。线控控制器是自动驾驶平台的绝对服从端,除了一些车载灯光等控制外,一般不具备自动制动功能,但是在面对突发性的自动驾驶平台断网,或者是路况不佳引起的溜车或者侧倾的状况时,会存在后车追尾或者翻车等安全隐患,甚至造成不必要的人身安全及经济损失。
3、因此,亟需一种方式,来增加无人驾驶矿卡在异常工况下的安全系数,减少不必要的安全事故,保障矿区安全有序生产
技术实现思路
1、本技术的主要目的在于提供一种无人驾驶车辆的控制方法、无人驾驶车辆的控制装置、计算机可读存储介质以及无人驾驶车辆的控制系统,以至少解决现有技术中的无人驾驶车辆在异常工况情况下的安全系数较低的问题。
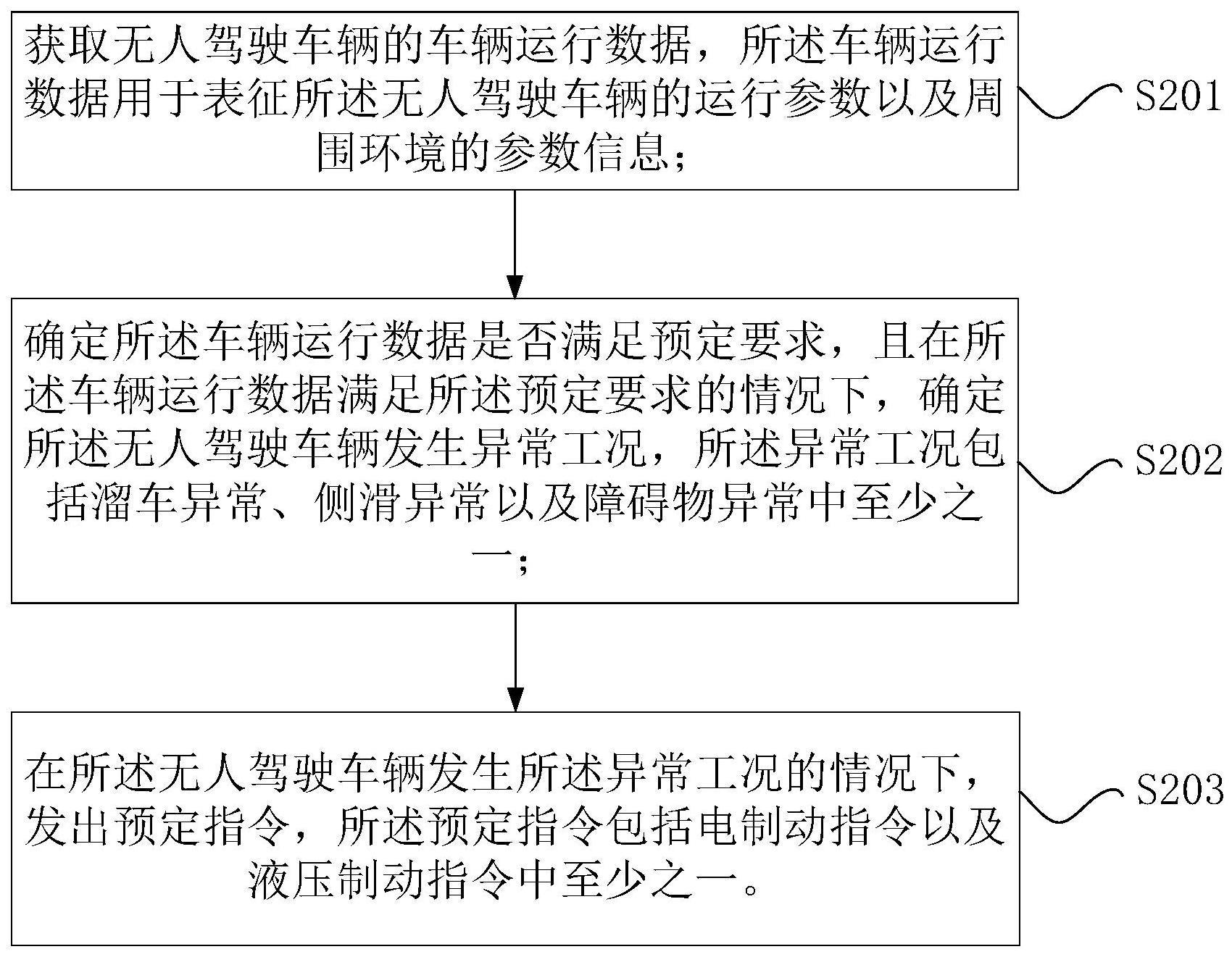
2、为了实现上述目的,根据本技术的一个方面,提供了一种无人驾驶车辆的控制方法,所述方法包括:获取无人驾驶车辆的车辆运行数据,所述车辆运行数据用于表征所述无人驾驶车辆的运行参数以及周围环境的参数信息;确定所述车辆运行数据是否满足预定要求,且在所述车辆运行数据满足所述预定要求的情况下,确定所述无人驾驶车辆发生异常工况,所述异常工况包括溜车异常、侧滑异常以及障碍物异常中至少之一;在所述无人驾驶车辆发生所述异常工况的情况下,发出预定指令,所述预定指令包括电制动指令以及液压制动指令中至少之一。
3、可选地,获取无人驾驶车辆的车辆运行数据,包括:获取距离数据,所述距离数据用于表征所述无人驾驶车辆前方的障碍物与所述无人驾驶车辆之间的距离;获取所述无人驾驶车辆的扭矩数据,所述扭矩数据为所述无人驾驶车辆的电机的扭矩;获取所述无人驾驶车辆的加速度数据,所述加速度数据包括纵向加速度数据以及横向加速度数据,所述纵向加速度数据为沿着所述无人驾驶车辆前进方向的加速度,所述横向加速度数据为沿着垂直于所述无人驾驶车辆前进方向的所述加速度;获取所述无人驾驶车辆的方位角数据,所述方位角数据用于表征所述无人驾驶车辆的倾斜角度,所述方位角数据包括纵向方位角数据以及横向方位角数据,所述纵向方位角数据为沿着所述无人驾驶车辆前进方向的所述倾斜角度,所述横向方位角数据为沿着垂直于所述无人驾驶车辆前进方向的所述倾斜角度;获取所述无人驾驶车辆的速度数据,所述速度数据用于表征所述无人驾驶车辆的车速。
4、可选地,确定所述车辆运行数据是否满足预定要求,且在所述车辆运行数据满足所述预定要求的情况下,确定所述无人驾驶车辆发生异常工况,包括:在所述距离数据小于第一预定值的情况下,确定所述无人驾驶车辆发生所述障碍物异常;在所述扭矩数据、所述纵向方位角数据以及所述纵向加速度数据满足第一预定条件的情况下,确定所述无人驾驶车辆发生上坡溜车异常,所述第一预定条件包括:所述纵向方位角数据位于第一预定范围内,所述扭矩数据大于第二预定值,所述纵向加速度数据小于第三预定值,以及所述扭矩数据中的扭矩方向与所述无人驾驶车辆的前进方向相同;在所述速度数据、所述扭矩数据、所述纵向方位角数据以及所述纵向加速度数据满足第二预定条件的情况下,确定所述无人驾驶车辆发生下坡溜车异常,所述第二预定条件包括:所述方位角数据位于第二预定范围内,所述纵向加速度数据小于所述第三预定值,所述速度数据位于第三预定范围内;在所述横向方位角数据大于第一阈值且所述横向加速度数据大于第二阈值的情况下,确定所述无人驾驶车辆发生所述侧滑异常。
5、可选地,在所述无人驾驶车辆发生所述异常工况的情况下,发出预定指令,包括:在所述无人驾驶车辆发生所述障碍物异常的情况下,确定所述无人驾驶车辆的所述速度数据是否在液压制动车速范围内;在所述无人驾驶车辆的所述速度数据位于所述液压制动车速范围内的情况下,发出所述液压制动指令;在所述无人驾驶车辆的所述速度数据未位于所述液压制动车速范围内的情况下,发出所述电制动指令。
6、可选地,在所述无人驾驶车辆发生所述异常工况的情况下,发出预定指令,包括:在所述无人驾驶车辆发生所述侧滑异常的情况下,确定所述速度数据是否位于制动车速范围内;在所述速度数据位于所述制动车速范围内的情况下,发出所述液压制动指令;在所述速度数据未位于所述制动车速范围内的情况下,发出所述电制动指令。
7、可选地,在所述无人驾驶车辆发生所述异常工况的情况下,发出预定指令,包括:在所述无人驾驶车辆发生所述上坡溜车异常的情况下,发出所述电制动指令;在所述无人驾驶车辆发生所述下坡溜车异常的情况下,确定所述无人驾驶车辆的所述速度数据是否在液压制动车速范围内;在所述无人驾驶车辆的所述速度数据位于所述液压制动车速范围内的情况下,发出所述液压制动指令;在所述无人驾驶车辆的所述速度数据未位于所述液压制动车速范围内的情况下,发出所述电制动指令。
8、根据本技术的另一方面,还提供了一种无人驾驶车辆的控制装置,所装置包括获取单元、确定单元以及发出单元,其中,所述获取单元用于获取无人驾驶车辆的车辆运行数据,所述车辆运行数据用于表征所述无人驾驶车辆的运行参数以及周围环境的参数信息;所述确定单元确定所述车辆运行数据是否满足预定要求,且在所述车辆运行数据满足所述预定要求的情况下,确定所述无人驾驶车辆发生异常工况,所述异常工况包括溜车异常、侧滑异常以及障碍物异常中至少之一;所述发出单元用于在所述无人驾驶车辆发生所述异常工况的情况下,发出预定指令,所述预定指令包括电制动指令以及液压制动指令中至少之一。
9、根据本技术的又一方面,还提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任一种所述的无人驾驶车辆的控制方法。
10、根据本技术的再一方面,还提供了一种无人驾驶车辆的控制系统,所述控制系统包括控制器以及传感器装置,其中,所述控制器用于执行任一种所述的无人驾驶车辆的控制方法;所述传感器装置与所述控制器通信连接,所述传感器装置位于所述无人驾驶车辆的车身,所述传感器装置用于提供车辆运行数据,所述车辆运行数据用于表征所述无人驾驶车辆的运行参数以及周围环境的参数信息。
11、可选地,所述传感器装置包括测距雷达、多个坡度传感器、多个加速度传感器、电机扭矩传感器以及轮速传感器,其中,所述测距雷达位于所述无人驾驶车辆的车头位置,所述测距雷达用于提供距离数据,所述距离数据用于表征所述无人驾驶车辆前方的障碍物与所述无人驾驶车辆之间的距离;所述坡度传感器位于所述无人驾驶车辆上,所述坡度传感器用于提供方位角数据,所述方位角数据用于表征所述无人驾驶车辆的倾斜角度,所述方位角数据包括纵向方位角数据以及横向方位角数据,所述纵向方位角数据为沿着所述无人驾驶车辆前进方向的所述倾斜角度,所述横向方位角数据为沿着垂直于所述无人驾驶车辆前进方向的所述倾斜角度;所述加速度传感器位于所述无人驾驶车辆的中心轴线上,所述加速度传感器用于提供加速度数据,所述加速度数据包括纵向加速度数据以及横向加速度数据,所述纵向加速度数据为沿着所述无人驾驶车辆前进方向的加速度,所述横向加速度数据为沿着垂直于所述无人驾驶车辆前进方向的所述加速度;所述电机扭矩传感器位于所述无人驾驶车辆的电机位置,所述电机扭矩传感器用于提供扭矩数据,所述扭矩数据为所述无人驾驶车辆的电机的扭矩;所述轮速传感器位于所述无人驾驶车辆上,所述轮速传感器用于提供速度数据,所述速度数据用于表征所述无人驾驶车辆的车速。
12、应用本技术的技术方案,所述无人驾驶车辆的控制方法中,首先,获取无人驾驶车辆的车辆运行数据,所述车辆运行数据用于表征所述无人驾驶车辆的运行参数以及周围环境的参数信息;然后,确定所述车辆运行数据是否满足预定要求,且在所述车辆运行数据满足所述预定要求的情况下,确定所述无人驾驶车辆发生异常工况,所述异常工况包括溜车异常、侧滑异常以及障碍物异常中至少之一;最后,在所述无人驾驶车辆发生所述异常工况的情况下,发出预定指令,所述预定指令包括电制动指令以及液压制动指令中至少之一。相比现有技术中无人驾驶车辆在异常工况情况下的安全系数较低的问题,本技术的所述无人驾驶车辆的控制方法,根据所述车辆运行数据确定所述无人驾驶车辆是否发生所述异常工况,由于所述车辆运行参数包括所述无人驾驶车辆的运行参数以及周围环境的参数信息,保证了所述车辆运行参数可以准确反映所述无人驾驶车辆的真实运行的情况以及周围环境,在发生所述异常工况的情况下,发出包括所述电制动指令以及所述液压制动指令中之一的所述预定指令,由于所述电制动指令是长制动,所述液压制动时点刹,使得可以根据不同的所述异常工况,发出对应的所述预定指令,实现了安全且及时地通过相应的制动方式来减速,保证了所述无人驾驶车辆在行驶过程中的安全性较高,解决了现有技术中的无人驾驶车辆在异常工况情况下的安全系数较低的问题。
- 还没有人留言评论。精彩留言会获得点赞!