一种车辆后视镜控制方法和装置与流程
本发明涉及汽车,尤其涉及一种车辆后视镜控制方法和装置。
背景技术:
1、车辆后视镜作为驾驶员辅助的工具,起到为驾驶员提供车辆后方、下方、侧向等外部场景信息的作用。目前各种车辆安装的传统常规的不可自动调节的车辆后视镜,大多都存在不同程度地视线盲区风险,尤其是在而且当车辆在变道、转向、上下坡道等车身姿态发生较大变化的工况时,驾驶员的视野受到的不良影响更为显著,对车辆的安全驾驶带来了很大隐患。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题,为此,本发明第一方面提出一种车辆后视镜控制方法,所述方法包括:
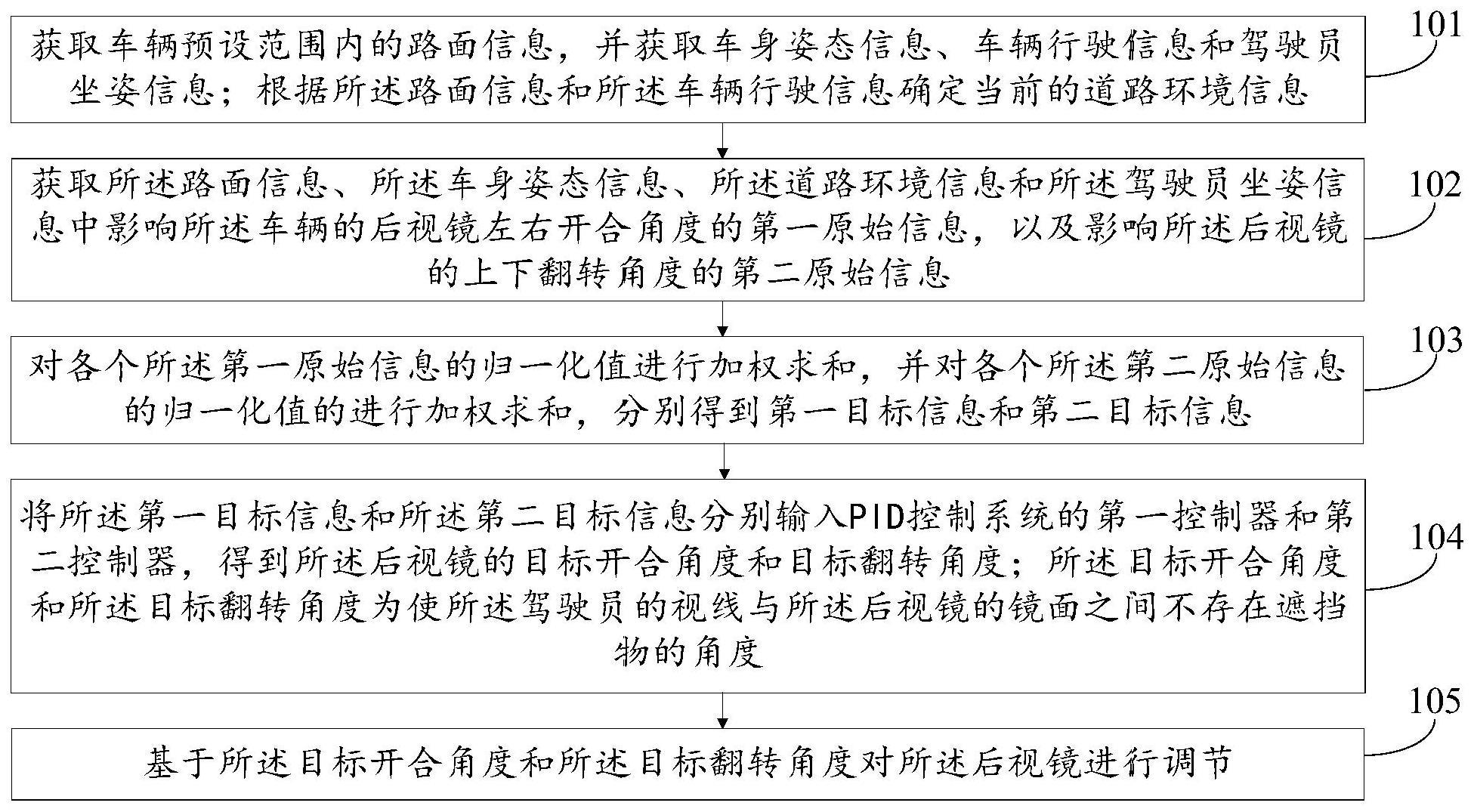
2、获取车辆预设范围内的路面信息,并获取车身姿态信息、车辆行驶信息和驾驶员坐姿信息;根据所述路面信息和所述车辆行驶信息确定当前的道路环境信息;
3、获取所述路面信息、所述车身姿态信息、所述道路环境信息和所述驾驶员坐姿信息中影响所述车辆的后视镜左右开合角度的第一原始信息,以及影响所述后视镜的上下翻转角度的第二原始信息;
4、对各个所述第一原始信息的归一化值进行加权求和,并对各个所述第二原始信息的归一化值的进行加权求和,分别得到第一目标信息和第二目标信息;
5、将所述第一目标信息和所述第二目标信息分别输入pid控制系统的第一控制器和第二控制器,得到所述后视镜的目标开合角度和目标翻转角度;所述目标开合角度和所述目标翻转角度为使所述驾驶员的视线与所述后视镜的镜面之间不存在遮挡物的角度;
6、基于所述目标开合角度和所述目标翻转角度对所述后视镜进行调节。
7、可选地,在对各个所述第一原始信息的归一化值进行加权求和之前,还包括:
8、获取预先设置的各个所述第一原始信息的第一最大值、各个所述第二原始信息的第二最大值;
9、确定各个所述第一原始信息与对应的所述第一最大值的商,得到各个所述第一原始信息的归一化值;
10、确定各个所述第二原始信息与对应的所述第二最大值的商,得到各个所述第二原始信息的归一化值。
11、可选地,所述第一控制器和所述第二控制器基于pid控制函数方程构建;在将所述第一目标信息和所述第二目标信息分别输入pid控制系统的第一控制器和第二控制器之前,还包括:
12、基于第一历史信息,对所述第一控制器的所述pid控制函数方程分别进行kp参数、ki参数、kd参数的整定,得到第一目标kp值、第一目标ki值和第一目标kd值;所述第一历史信息为历史时间段采集的所述路面信息、所述车身姿态信息、所述道路环境信息和所述驾驶员坐姿信息中,影响所述车辆的后视镜左右开合角度的信息;
13、基于第二历史信息,对所述第二控制器的所述pid控制函数方程分别进行kp参数、ki参数、kd参数的整定,得到第二目标kp值、第二目标ki值和第二目标kd值;所述第二历史信息为历史时间段采集的所述路面信息、所述车身姿态信息、所述道路环境信息和所述驾驶员坐姿信息中,影响所述车辆的后视镜上下翻转角度的信息。
14、可选地,所述基于第一历史信息,对所述第一控制器的所述pid控制函数方程进行kp参数的整定,包括:
15、对各个所述第一历史信息的归一化值进行加权求和,得到第一输入值;
16、分别将所述pid控制函数方程中的kp值、ki值、kd值设置为第一kp值、第一ki值、第一kd值,其中,所述第一kp值为所述kp值的预设最大值的n%,n≥80%;所述第一ki值、第一kd值均为0;
17、基于所述第一输入值、所述第一kp值、所述第一ki值和所述第一kd值,利用所述pid控制函数方程确定第一候选开合角度;
18、根据所述第一候选开合角度和预设的目标开合角度之间的差值,确定所述第一候选开合角度的第一超调值;
19、当所述第一超调值大于或等于第一预设阈值时,将所述kp值减小至第二kp值,并基于所述第一输入值、所述第二kp值、所述第一ki值和所述第一kd值,利用所述pid控制函数方程确定第二候选开合角度;所述第二kp值为所述kp值的预设最大值的n%,n<20;
20、当所述第一超调值小于第二预设阈值时,将所述kp值增加至第三kp值,并确定所述第一输入值与所述第三kp值的乘积,得到第二候选开合角度;所述第三kp值为所述kp值的预设最大值的n%,20≤n<80;所述第二预设阈值小于所述第一预设阈值;
21、根据所述第二候选开合角度和所述目标开合角度之间的差值,确定所述第二候选开合角度的第二超调值;
22、根据所述第二超调值确定所述kp值下一次的调整值,直至调整后的超调值大于或等于所述第二预设阈值且小于所述第一预设阈值,得到目标kp值。
23、可选地,所述基于第一历史信息,对所述第一控制器的所述pid控制函数方程进行ki参数的整定,包括:
24、将所述pid控制函数方程中的kp值设置为所述目标kp值,并将所述ki值设置为第二ki值,所述第二ki值为预设的ki取值范围内的任意负数值;
25、基于所述第一输入值、所述目标kp值、所述第二ki值和所述第一kd值,确定第三候选开合角度;
26、基于所述第三候选开合角度对所述后视镜进行调节,并根据调节后的所述后视镜与所述驾驶员的视线之间的遮挡物状况确定所述第三候选开合角度的第三超调值;
27、当所述第三超调值小于所述第二预设阈值时,将所述ki值逐渐增大,并确定各个增大的ki值对应的各个候选开合角度,直至调整后的超调值大于或等于所述第二预设阈值且小于第三预设阈值,得到目标ki值;所述第三预设阈值小于所述第一预设阈值;
28、当所述第三超调值大于所述第三预设阈值时,将所述ki值逐渐减小,并确定各个减小的ki值对应的各个候选开合角度,直至调整后的超调值大于或等于所述第二预设阈值且小于第三预设阈值,得到目标ki值;
29、当所述第三超调值大于或等于所述第二预设阈值且小于所述第三预设阈值时,将所述第二ki值作为所述目标ki值。
30、可选地,所述基于第一历史信息,对所述第一控制器的所述pid控制函数方程进行kd参数的整定,包括:
31、将所述pid控制函数方程中的kp值设置为所述目标kp值,将所述ki值设置为所述目标ki值,并将所述kd值设置为第二kd值,所述第二kd值为预设的kd取值范围内的任意负数值;
32、基于所述第一输入值、所述目标kp值、所述目标ki值和所述第二kd值,确定第四候选开合角度;
33、基于所述第四候选开合角度对所述后视镜进行调节,并根据调节后的所述后视镜与所述驾驶员的视线之间的遮挡物状况确定所述第四候选开合角度的第四超调值;
34、当所述第四超调值小于所述第二预设阈值时,将所述第二kd值作为所述目标kd值;
35、当所述第四超调值大于或等于所述第二预设阈值时,将所述kd值逐渐增大,并确定各个增大的ki值对应的各个候选开合角度,直至调整后的超调值小于所述第二预设阈值,得到目标ki值。
36、可选地,所述基于所述第一输入值、所述第一kp值、所述第一ki值和所述第一kd值,利用所述pid控制函数方程确定第一候选开合角度,包括:
37、根据所述第一输入值确定所述pid控制函数方程中的偏差值;
38、将所述偏差值、所述第一kp值、所述第一ki值和所述第一kd值代入所述pid控制方程中,得到第一候选开合角度。
39、本发明第二方面提出一种车辆后视镜控制装置,所述装置包括:
40、第一信息获取模块,用于获取车辆预设范围内的路面信息,并获取车身姿态信息、车辆行驶信息和驾驶员坐姿信息;根据所述路面信息和所述车辆行驶信息确定当前的道路环境信息;
41、第二信息获取模块,用于获取所述路面信息、所述车身姿态信息、所述道路环境信息和所述驾驶员坐姿信息中影响所述车辆的后视镜左右开合角度的第一原始信息,以及影响所述后视镜的上下翻转角度的第二原始信息;
42、加权求和模块,用于对各个所述第一原始信息的归一化值进行加权求和,并对各个所述第二原始信息的归一化值的进行加权求和,分别得到第一目标信息和第二目标信息;
43、角度计算模块,用于将所述第一目标信息和所述第二目标信息分别输入pid控制系统的第一控制器和第二控制器,得到所述后视镜的目标开合角度和目标翻转角度;所述目标开合角度和所述目标翻转角度为使所述驾驶员的视线与所述后视镜的镜面之间不存在遮挡物的角度;
44、调节模块,用于基于所述目标开合角度和所述目标翻转角度对所述后视镜进行调节。
45、本发明第三方面提出一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现如第一方面所述的车辆后视镜控制方法。
46、本发明第四方面提出一种计算机可读存储介质,所述存储介质中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由处理器加载并执行以实现如第一方面所述的车辆后视镜控制方法。
47、本发明实施例具有以下有益效果:
48、本发明实施例提供的车辆后视镜控制方法,获取车辆预设范围内的路面信息,并获取车身姿态信息、车辆行驶信息和驾驶员坐姿信息;根据路面信息和车辆行驶信息确定当前的道路环境信息;获取路面信息、车身姿态信息、道路环境信息和驾驶员坐姿信息中影响车辆的后视镜左右开合角度的第一原始信息,以及影响后视镜的上下翻转角度的第二原始信息;对各个第一原始信息的归一化值进行加权求和,并对各个第二原始信息的归一化值的进行加权求和,分别得到第一目标信息和第二目标信息;将第一目标信息和第二目标信息分别输入pid控制系统的第一控制器和第二控制器,得到后视镜的目标开合角度和目标翻转角度;目标开合角度和目标翻转角度为使驾驶员的视线与后视镜的镜面之间不存在遮挡物的角度;基于目标开合角度和目标翻转角度对后视镜进行调节。本方案基于目标开合角度和目标翻转角度对后视镜进行调节,使驾驶员的视线与后视镜的镜面之间不存在遮挡物,从而有效减小驾驶员的视野盲区范围,保证了驾驶员行车时的有效观察视角,减少了由于视野不足而带来的潜在危险,保障了车辆行驶过程中的安全性。
- 还没有人留言评论。精彩留言会获得点赞!