一种基于轮桨腿一体化的多运动模态的两栖机器人及方法
本发明属于机器人,尤其涉及一种基于轮桨腿一体化的多运动模态的两栖机器人及方法。
背景技术:
1、随着机械工程,信息技术的飞速发展,机器人在工业生产、航空航天、抗震救灾等领域得到了日益广泛的应用。其中水路两栖机器人在军事、工业、养殖业、救援、交通、海洋开发等诸多领域均具有重要的军事价值和社会经济价值。两栖机器人器具有高效的水路转换能力和快速部署能力,能够高效保人们的生命财产。
2、目前两栖机器人主要2类:仿生类两栖机器人,复合式两栖机器人。
3、现有技术对仿生类中蛇形机器人有所研究,仿蛇型机器人技术关键在于多模块的结构设计和协同控制,其柔性的结构使其能够在复杂、狭小区域执行探测搜救任务, 但这种结构也限制了其负载能力和移动速度以及大量的控制复杂程度,对机械,控制器均造成巨大负担。
4、现有技术提供的仿青蛙机器人其水下泳姿能使其可以在水下自由行进,其路上弹跳能力也为其带来了强大的越障能力。但其难点在于腿部结构设计与驱动模式的设计带来了巨大困难,很难实现两栖行动,在路上跳跃功能难实现。除此之外还有许多仿生爬行动物的两栖机器人,但其难以在水中游泳,仅能在水底和路上执行作业任务。
5、再者,现有技术提供的足桨式多模态两栖机器人,依托足桨符合机构和可变形关节,可以在路上和水下快速行动,但其对于复杂滩涂环境没有解决办法,没有办法进行越障功能,只能绕行。现有技术对仿鱼鳍结构的机器人研究多,但大多只能在水中行进,其中波动鳍的设计将仿鱼鳍的结构拓展在了陆地上,但其移动速度以及负载能力均有一定程度上的削弱。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了一种基于轮桨腿一体化的多运动模态的两栖机器人及方法。
2、所述技术方案如下:一种基于轮桨腿一体化的多运动模态的两栖机器人,包括用于在水陆多方向运动的机器人机体,所述机器人机体两侧对称设置有可改变不同坐标位置的多个轮桨腿一体化结构,所述多个轮桨腿一体化结构根据不同实际环境需求,多个轮桨腿一体化结构可改变的不同坐标位置进行自由组合,形成不同的多种运动模态,适应面对陆地不同地形,海洋单向流或其他复杂多变流下的移动。
3、进一步的,所述轮桨腿一体化结构由腿部倾转机构,轮式旋转结构,桨叶推进结构,及减振悬挂结构;
4、所述腿部倾转机构用于改变整个轮桨腿一体化结构运动模态,实现对机器人机体的推进形式进行改变,使机器人机体在陆地,水底,水下进行移动;
5、所述轮式旋转结构用于选转腿部倾转机构;
6、所述桨叶推进结构用于机器人机体在陆地,水底,水下进行移动;
7、所述减振悬挂结构用于减缓桨叶推进结构在移动中的冲击力。
8、当遇到障碍时,单独抬起腿部倾转机构,越过障碍。
9、在进入水下环境时,通过轮式旋转结构旋转腿部倾转机构,使桨叶推进结构及的桨叶与平面形成夹角,减振悬挂结构处于可拉伸状态。
10、在抗衡负浮力的推力时,桨叶推进结构在腿部倾转机构、轮式旋转结构的作用下,发生倾转,减振悬挂结构处于压缩状态;使桨叶推进结构在机器人机体坐标系下,沿yoz平面进行运动,产生对抗重力与浮力差值的力,在水中悬浮运动。
11、进一步的,所述机器人机体包括: 轮桨腿一体化结构通过舵机固定角码固定在侧面支撑板上,侧面支撑板上部密封盖合有固定顶板,侧面支撑板下部密封盖合有固定底盘;固定顶板与固定底盘之间安装有支撑柱,固定顶板上部密封有浮体;浮体的两侧安装有u型吊钩,浮体的上中部安装有无线信号接收器;
12、所述浮体的前后侧分别紧密设置有水下推进器;所述水下推进器通过齿轮组合以及传动杆连接轮桨腿一体化结构,舵机固定角码上还固定有舵机固定轧带,舵机固定轧带用于密封在水下推进器与轮桨腿一体化结构连接处;
13、位于所述机器人机体中心的控制密封舱前端固定有led射灯,摄像头。
14、所述控制密封舱内密封安装有感知模块,机体控制模块,姿态控制模块、电源模块;所述有感知模块,机体控制模块,姿态控制模块均通过信号与外部远程通讯模块连接;
15、所述水下推进器通过信号线分别连接机体控制模块,姿态控制模块,电源模块;
16、所述感知模块,固定在机器人机体的控制密封舱外壳左侧面,用于在不同方向上行进时作为观测感知机构;
17、所述机体控制模块用于控制机器人机体运动姿态。
18、所述感知模块由包括摄像头, led射灯,惯性导航模块,水压计, gps及电流计组成;
19、所述机体控制模块用于接收并发送感知模块采集的信息到远程通讯模块;针对姿态控制模块发送给远程通讯模块的控制信息,机体控制模块同时组合姿态控制模块或单独驱动控制轮桨腿一体化结构上的不同运动模态;
20、所述远程通讯模块由操作手柄,显示屏与无线通讯模块组成;所述无线通讯模块用于对操作手柄的远程操控指令发出,与所述感知模块,机体控制模块,姿态控制模块相连接。
21、本发明的另一目的在于提供一种基于轮桨腿一体化的多运动模态的两栖机器人的运动模态转换行进的推进方法,包括:
22、针对不同环境、不同技术需求,选取不同运动模态;
23、当在陆上无水环境下,轮桨腿一体化结构与机器人机体成90°,桨叶推进结构的轮胎与地面相切;
24、通过四轮差速控制在陆上无水环境下运动,在面对障碍物时可以倾转腿部倾转机构通过控制轮式旋转结构中的舵机旋转倾转腿部倾转机构,进行越障;
25、若行驶至近海岸两栖交界处,机器人机体以贴底方式进行移动入水;根据其任务工况,任务需求,进行不同的运动模态变换;四个轮式旋转结构的舵机分别抬起腿部倾转机构到不同位置,根据抬起角度不同实现不同的运动模态。
26、进一步的,该方法在军事、工业、养殖业、救援、交通、海洋开发领域水路两栖机器人上进行应用。
27、结合上述的所有技术方案,本发明所具备的优点及积极效果为:本发明两栖模式转换迅速,其具有更高效的障碍物的越障能力,推进效率与灵活性更强。尤其是在面对复杂的滩涂,堤坝环境,其腿部倾转机构可以使其在面对障碍物,软泞地面时具有更高效脱险、越障能力。在水下运动时,轮桨腿一体化结构使其可以在水下,水底进行移动,使其可以适应多种任务模式。进行水下悬浮运动时,其可以作为四旋翼或矢量推进两种形态进行运动,根据不同的任务需求,如姿态,运动效率,平稳型等,选取不同的运动模态与运动姿态。当机器人处于四旋翼形态其平衡的运动能力可以使其在保持良好运动姿态的同时,进行快速移动,对环境的适应能力更强,具有较强的抗干扰能力。当机器人处于矢量推进形态,其可以减少其运动时收到的阻力,增加其运动速度与减少其能量消耗。
28、控制简单,对于机器人运动具有更可靠的运动模型与运动能力,更适合作为移动两栖作业机器人,其负载可以搭载多种作业设备,完成多种作业活动。
技术特征:
1.一种基于轮桨腿一体化的多运动模态的两栖机器人,其特征在于,该机器人包括用于在水陆多方向运动的机器人机体,所述机器人机体两侧对称设置有可改变不同坐标位置的多个轮桨腿一体化结构(1),所述多个轮桨腿一体化结构(1)根据不同实际环境需求,多个轮桨腿一体化结构(1)可改变的不同坐标位置进行自由组合,形成不同的多种运动模态,适应面对陆地不同地形,海洋单向流或其他复杂多变流下的移动。
2.根据权利要求1所述的基于轮桨腿一体化的多运动模态的两栖机器人,其特征在于,所述轮桨腿一体化结构(1)由腿部倾转机构(1-1),轮式旋转结构(1-2),桨叶推进结构(1-3),及减振悬挂结构(1-4);
3.根据权利要求2所述的基于轮桨腿一体化的多运动模态的两栖机器人,其特征在于,当遇到障碍时,单独抬起腿部倾转机构(1-1),越过障碍。
4.根据权利要求2所述的基于轮桨腿一体化的多运动模态的两栖机器人,其特征在于,在进入水下环境时,通过轮式旋转结构(1-2)旋转腿部倾转机构(1-1),使桨叶推进结构及(1-3)的桨叶与平面形成夹角,减振悬挂结构(1-4)处于可拉伸状态。
5.根据权利要求2所述的基于轮桨腿一体化的多运动模态的两栖机器人,其特征在于,在抗衡负浮力的推力时,桨叶推进结构(1-3)在腿部倾转机构(1-1)、轮式旋转结构(1-2)的作用下,发生倾转,减振悬挂结构(1-4)处于压缩状态;使桨叶推进结构(1-3)在机器人机体坐标系下,沿yoz平面进行运动,产生对抗重力与浮力差值的力,在水中悬浮运动。
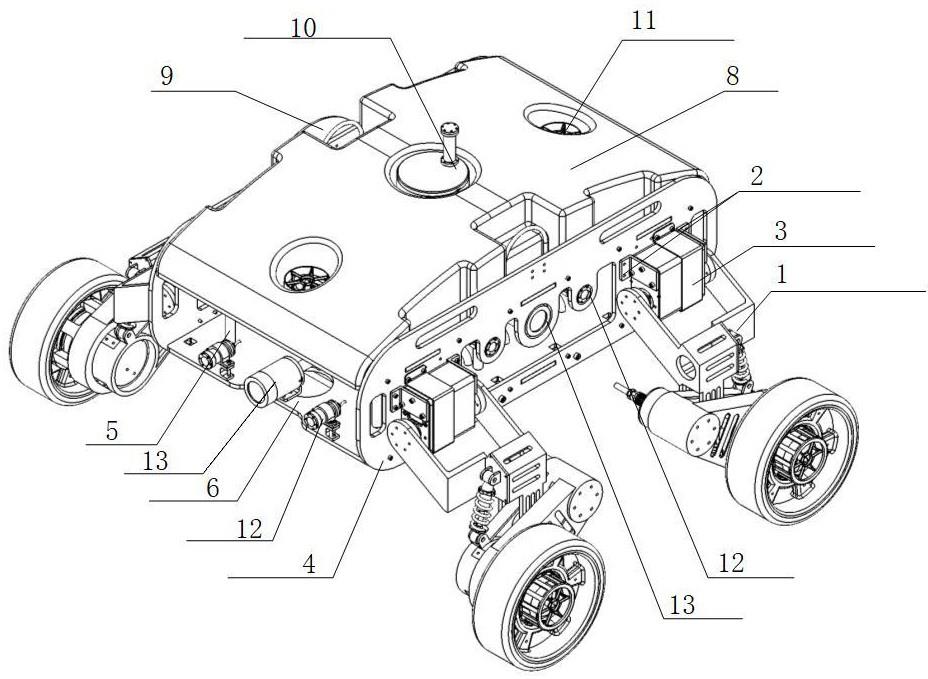
6.根据权利要求1所述的基于轮桨腿一体化的多运动模态的两栖机器人,其特征在于,所述机器人机体包括:固定角码(2),舵机固定轧带(3),侧面支撑板(4),支撑柱(5),固定底盘(6),固定顶板(7),浮体(8), u型吊钩(9),无线信号接收器(10),水下推进器(11), led射灯(12),摄像头(13),控制密封舱(14);
7.根据权利要求6所述的基于轮桨腿一体化的多运动模态的两栖机器人,其特征在于,所述控制密封舱(14)内密封安装有感知模块(b),机体控制模块(c),姿态控制模块(e)、电源模块(f);所述有感知模块(b),机体控制模块(c),姿态控制模块(e)均通过信号与外部远程通讯模块(d)连接;
8.根据权利要求7所述的基于轮桨腿一体化的多运动模态的两栖机器人,其特征在于,所述感知模块(b)由包括摄像头(13), led射灯(12),惯性导航模块(15),水压计(16), gps(17)及电流计(18)组成;
9.一种基于轮桨腿一体化的多运动模态的两栖机器人的运动模态转换行进的推进方法,其特征在于,采用上述权利要求1-8任意一项基于轮桨腿一体化的多运动模态的两栖机器人,该方法包括:
10.根据权利要求9所述的基于轮桨腿一体化的多运动模态的两栖机器人的运动模态转换行进的推进方法,其特征在于,该方法在军事、工业、养殖业、救援、交通、海洋开发领域水路两栖机器人上进行应用。
技术总结
本发明属于机器人技术领域,公开了一种基于轮桨腿一体化的多运动模态的两栖机器人及方法。该机器人包括用于在水陆多方向运动的机器人机体,所述机器人机体两侧对称设置有可改变不同坐标位置的多个轮桨腿一体化结构,所述多个轮桨腿一体化结构根据不同实际环境需求,多个轮桨腿一体化结构可改变的不同坐标位置进行自由组合,形成不同的多种运动模态,适应面对陆地不同地形,海洋单向流或其他复杂多变流下的移动。本发明控制简单,对于机器人运动具有更可靠的运动模型与运动能力,更适合作为移动两栖作业机器人,其负载可以搭载多种作业设备,完成多种作业活动。
技术研发人员:张磊,关明京,李华军,焦腾飞,张帅,陈玉静
受保护的技术使用者:中国海洋大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!