一种可垂直起降的水中滑行三栖艇及其控制方法
本发明涉及多栖航行器,特别是涉及一种可垂直起降的水中滑行三栖艇。
背景技术:
1、近年来,随着低空空域的逐步开放,我国通用两栖、多栖航行器迎来了蓬勃发展的时代。水下滑行艇和水上飞机因其依赖资源少,成为我国船舶海洋事业的重点发展领域。但对近年来水上飞机不安全事件和安全事故的分析可知,事故多发生于起降阶段且引发事故的风险因素错综复杂,加大了水上飞机安全管理的难度。从而,频繁的不安全事件和安全事故在一定程度上制约了我国多栖航行器的发展。而且,对于在广阔的海洋中航行的多栖航行器,能源也是需要重点解决的问题。
2、而且由于对两栖、多栖航行器的研究我国尚处于早期或不成熟阶段,虽然已有很多设想提出,但仍存在一定缺陷,且难以投入大规模生产。目前市面上主流的三栖航行器都是指陆地、空中和水面三栖,很少有潜水航行的功能,大多都是与水上飞机类似。而且对于三栖飞行器存在的稳定性、转换方式、续航等诸多方面问题也难以彻底解决,因此进一步开展对三栖飞行器的研究有着重要价值。
技术实现思路
1、发明目的:本发明的目的是提供一种可垂直起降的水中滑行三栖艇及其控制方法以解决上述技术问题。
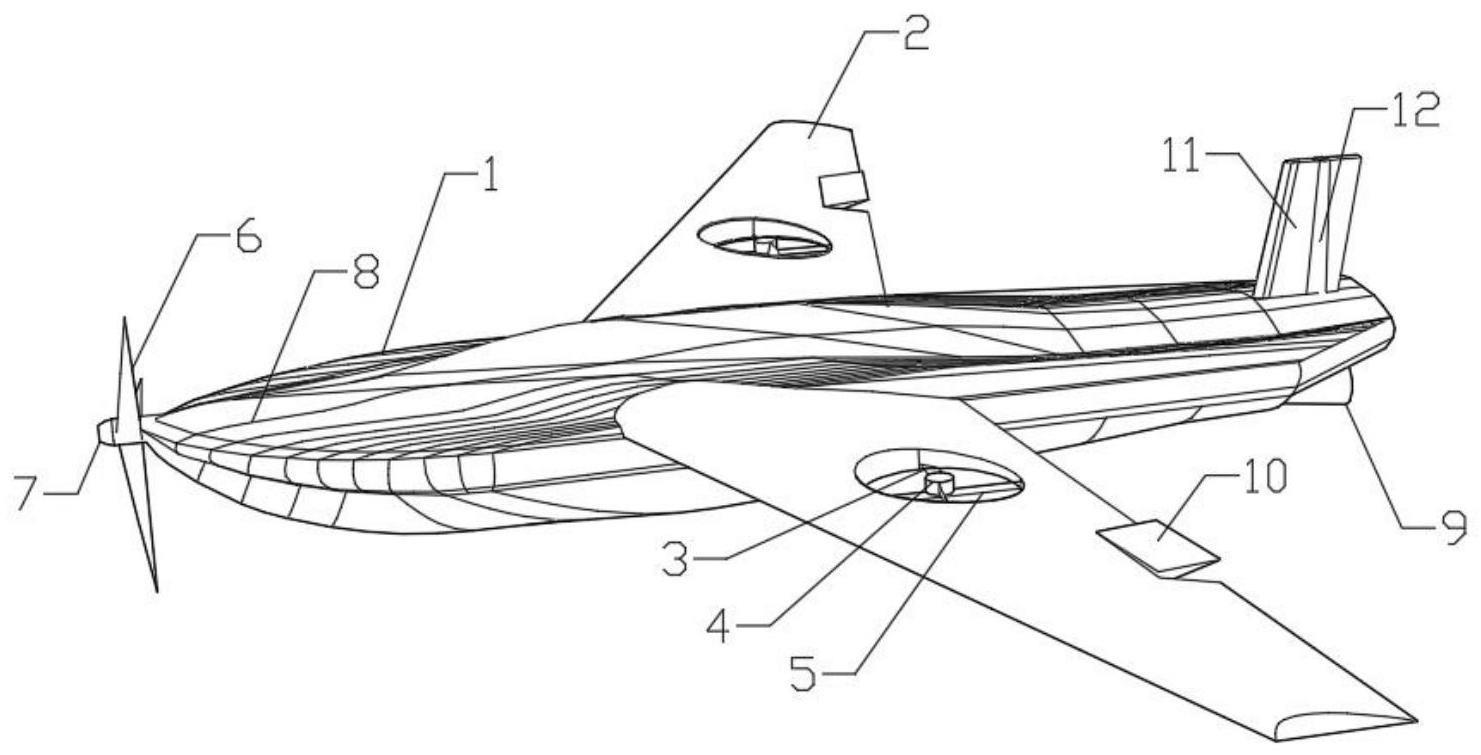
2、技术方案:本发明的一种可垂直起降的水中滑行三栖艇,包括艇身机构、垂直起降机构、空中飞行动力机构、水面水下航行动力机构和转向机构;所述艇身机构包括艇身、艇翼和内部舱体,所述垂直起降机构设置于艇翼上,包括旋翼、旋翼动力装置、旋翼支撑和用于在运行时保护旋翼并使艇翼保持完整的外形可伸缩旋翼保护封闭门板;所述空中飞行动力机构设置于艇艏,包括用于提供飞行动力的可伸缩螺旋桨,所述艇身前部设有螺旋桨收纳舱;所述水面水下航行动力机构为设置在艇尾下端的喷水式推进器和压载水机构;所述转向机构包括布置于艇翼上的升降舵和通过转动轴与艇尾连接的方向舵。
3、通过调节升降舵与艇翼的夹角对三栖艇在升降的方向上进行控制。方向舵由方向舵转动轴连接在艇尾处,可自由转动来对艇进行左右方向的转向控制。升降舵和方向舵相互配合,可使三栖艇在空中、水中运动具有较强的灵活性。
4、采用布置在艇尾下端喷水式推进器,不仅操纵性和机动性、高航速时推进效率高、主机不易超负荷,而且抗空泡能力强,噪声小,在水下具有较强的隐蔽性。
5、进一步的,所述旋翼支撑设置于艇翼孔洞下部,所述旋翼动力装置在旋翼支撑上方连接,所述旋翼分为两片连接在旋翼动力装置侧面,所述旋翼保护封闭门板分为与艇翼外部形状相匹配的两块门板,在艇翼孔洞的上下贴合艇翼可伸缩布置。封闭门板不工作时会移动隐藏到艇翼内侧的空间内,工作时会对孔洞的上下进行封闭,保护旋翼避免发生被水草缠绕的事故,还会使艇翼保持完整的外形,避免艇翼不规则使三栖艇航行失控,保持航行过程中的稳定性。
6、进一步的,所述艇身整体线型横剖面为圆舭型,艇尾为折角型,艇身位于排水线以下的艇底线型横剖面为艇艏横截面形状是u型,艇尾横截面形状是v型的u-v剖面混合线型,艇尾位于喷水式推进器上部形状为用于降低高速时艇体阻力的近方形。采用圆舭型,剖面较为丰满,舱室容积大,不仅重心较低,稳定性好,而且长宽设计比较大,船体瘦长,由阻力理论可知,这有利于减小在高速情况下的剩余阻力。当艇体高速航行时,方尾下端低于舷侧水面,水流向后形成一个凹槽,仿佛是方尾未切断前船体的延伸,这就是所谓增加了“虚长度”。从阻力角度看,“虚长度”的作用等于延长了船长,即增加了水线长度,使排水量长度系数减小,所以可以使总阻力下降。
7、进一步的,所述艇身机构展弦比为7.69,所述艇翼前缘后掠角为24°,后缘后掠角为10°。
8、进一步的,所述螺旋桨为三叶螺旋桨,所述空中飞行动力机构还包括可伸缩传动轴,所述传动轴带动螺旋桨折叠回缩。传动轴在伸长后可使螺旋桨折叠贴附于传动轴,收缩后带动螺旋桨进入收纳舱中。
9、进一步的,所述内部舱体通过防水隔板隔分成沿艇体长度方向的前中后三部分,其中中间部分又被分为上下两部分,各舱室间互不相通,所述螺旋桨收纳舱为不与其他舱室连通的细长形防水密封舱。防止水流在隔舱之间相互流动,从而在受损时仍可以具有足够的浮力和稳定性。
10、进一步的,所述艇翼通过艇翼收放伸缩杆与艇身活动连接,所述艇翼收放伸缩杆一端与艇身旋转连接,所述艇翼收放伸缩杆另一端与艇翼旋转连接。
11、进一步的,所述船艏的外形为用于减少入水砰击力的仿鲸鱼线型设计。
12、本发明的一种可垂直起降的水中滑行三栖艇的控制方法,包括以下步骤:
13、s1信息采集和预处理:对三栖艇的数据进行采集,并对三栖艇传感系统获取的数据进行滤波和预处理,使用卡尔曼滤波算法来减少误差和噪声的影响,该滤波算法利用线性动态系统模型,通过贝叶斯方法进行状态估计,此外,采用数字信号处理技术,进一步提高数据处理和滤波的效果;
14、s2状态估计和模式分类:根据传感系统数据和环境参数,判断当前的工作模式为空中/水面/水下和工作状态,在空中工作模式下,使用基于机器学习的分类器识别不同的空中工作状态,在水面和水下工作模式下,使用基于深度学习的模型,实现精确的状态估计和模式分类,并根据预设的工作参数和规则对三栖艇的状态进行调整;
15、s3智能控制和规划:
16、s31对于空中工作模式:使用模型预测和控制算法调整旋翼动力装置的速度和螺旋桨旋转速度,以实现精确的高度和速度控制;通过优化算法和规划器自动调整升降舵和方向舵的角度,调整飞行方向和姿态;使用智能控制算法和传感系统反馈,根据三栖艇的工作模态自动调整旋翼保护封闭门板的移动,以保护旋翼并保持艇翼的完整外形来保证艇翼的空气动力性能,并保持航行过程中的稳定性;使用基于模糊逻辑的控制算法来实现对风速和风向变化的自适应控制;
17、s32对于水面工作模式:使用自适应控制算法和模型预测控制器,根据航行需求和环境参数,自动调整艇翼的收起和展开,启动和控制喷水式推进器的转速和角度,实现精确的航行方向和速度控制;基于传感系统反馈的控制算法,在水流速度和方向变化时自动调整艇翼和推进器的角度,以保持稳定的航行姿态,实现对涡流、流水和波浪的自适应控制和稳定控制;
18、s33对于水下工作模式:使用自适应控制算法和模型预测控制器,根据水下滑行需求和环境参数,自动调整压载水舱的阀门和泵,实现精确的上浮和下沉控制;通过优化算法和规划器,自动调整压载水的量和位置,以实现平衡和稳定的水下滑行姿态;使用智能控制算法和传感系统反馈,在水流速度和方向变化时自动调整压载水的位置和流速,以保持稳定的水下姿态和速度;
19、s4模式转换控制和协同控制:在转换工作模式时,采用分布式协同控制算法和状态估计器,别对各个控制单元进行分析和控制,再通过通信和信息交换实现协同和协作;根据预设的转换规则和优化目标,自动调整旋翼保护封闭门板的移动和旋翼动力装置的速度,同时调整螺旋桨的伸展和收缩,以实现平稳的转换过程;在从水面工作模式转换到空中工作模式时,使用基于模型预测控制的协同控制算法,来实现旋翼动力装置和艇翼的平稳转换;
20、s5传感系统反馈和自适应控制:通过建立动态模型和状态估计器,实时监测和调整各个部件的工作状态和参数,使用传感系统反馈和自适应控制,保持三栖艇的稳定性和灵活性;并结合机器学习和深度学习技术,使用大量的实验数据和模拟仿真,优化算法和系统性能,以提高三栖艇的智能化和自适应性;在进行空中工作模式的仿真时,可以使用基于飞行器动力学和空气动力学的模型,结合机器学习技术,对控制算法和规划器进行优化和验证;对于不同的应用场景和任务需求,设置多种工作模式和参数配置,以满足不同的操作和控制需求;
21、s6数据安全和隐私保护:采用区块链技术,利用区块链的去中心化和不可篡改性特点,保证数据的完整性和不可伪造性;同时,利用多重加密和公开验证技术,确保数据的保密性和隐私性。
22、进一步的,所述s1中使用小波变换和滑动窗口滤波进一步提高数据处理和滤波的效果;所述s2中使用卷积神经网络和循环神经网络实现精确的状态估计和模式分类;所述s31中使用lqr和mpc精确调整旋翼动力装置的速度和螺旋桨旋转速度,使用模糊pid控制器,实现对风速和风向变化的自适应控制;所述s32中采用自适应滑模控制和自适应神经网络控制在水流速度和方向变化时自动调整艇翼和推进器的角度;所述s33中通过遗传算法或优化搜索算法自动调整压载水的量和位置。
23、有益效果:与现有技术相比,本发明具有以下显著优点:
24、(1)本发明集飞机、快艇、水下航行器概念于一体。相较于水下滑翔机而言增加了空中航行能力;相较于水上飞机而言增加了水下航行能力。它能够在空中、水面、水下进行作业,且在成功实现三栖工作的同时还具有单一形态下的优异的工作性能;
25、(2)本发明可以实现垂直起降,受场地限制小,不需要滑行一段距离而直接垂直起飞,可以在短时间内实现快速升降,且在航行器稳定安全的前提下,具有较小的结构重量,能提高飞行速度和推进效率。不仅极大的避免了由于操作不当而引起的航行器起降过程中发生事故,可以在普通水上飞机无法起飞的恶劣海况中正常起飞;还可以在狭窄水域和部分受限水域进行起降,从而提高了机动性和隐蔽性,执行常规水上飞机无法执行的需要隐蔽性的任务;
26、(3)本发明可在水下以滑行的方式航行,可通过调节压载水,调整重心的位置,利用重力、浮力和洋流来实现类似于水下滑翔机的滑翔运动,将沉浮运动变成向前运动,可以实现低能耗、绿色环保,并且拥有较强的续航能力,能够在水中执行巡逻监测、收集环境数据等任务时体现巨大的优势;
27、(4)本发明具有灵巧的转换控制,能够稳定、快速的完成由空中到水面、水面到水下以及反向形态转换。并且三栖艇在各个工作环境下转向灵活,外形设计采用仿生学原理和圆舭艇技术,有利于减小在高速情况下的剩余阻力,对快速性和耐波性两者都有利,具有较强的机动性,在快速巡逻,追踪目标时具有优异的性能。
28、(5)本发明的控制方法在实现控制艇的同时,能够有效保护三栖艇数据的安全和隐私,并对于日后的数据审计和质检起到重要作用。
- 还没有人留言评论。精彩留言会获得点赞!