一种自适应巡航车辆控制方法、装置、设备及存储介质与流程
本发明涉及车辆控制,尤其涉及一种自适应巡航车辆控制方法、装置、设备及存储介质。
背景技术:
1、自适应巡航系统是用于汽车的驾驶辅助系统,可以帮助驾驶员在道路上保持安全距离,可跟随前车行驶,与前车自动保持一定的时距。虽然本车可以与前车保持一定时距,避免与前车的碰撞风险,但未考虑本车与后车的风险。
2、目前市场上配有自适应巡航功能的车辆,都只是配有前视摄像头或者前毫米波雷达传感器,通过摄像头或雷达感知前车的运行状态,忽略了对后方车辆的实时检测,虽然可以与前车保持一定的时距,但并没有考虑因为后车与本车的时距,容易造成后车与本车的时距过近,增加了避免追尾的风险。
技术实现思路
1、本发明提供了一种自适应巡航车辆控制方法、装置、设备及存储介质,以实现实时调整本车与前车和后车的时距,尽量增大本车与后车的时距,减少后车与本车的碰撞风险。
2、根据本发明的一方面,提供了一种自适应巡航车辆控制方法,该方法包括:
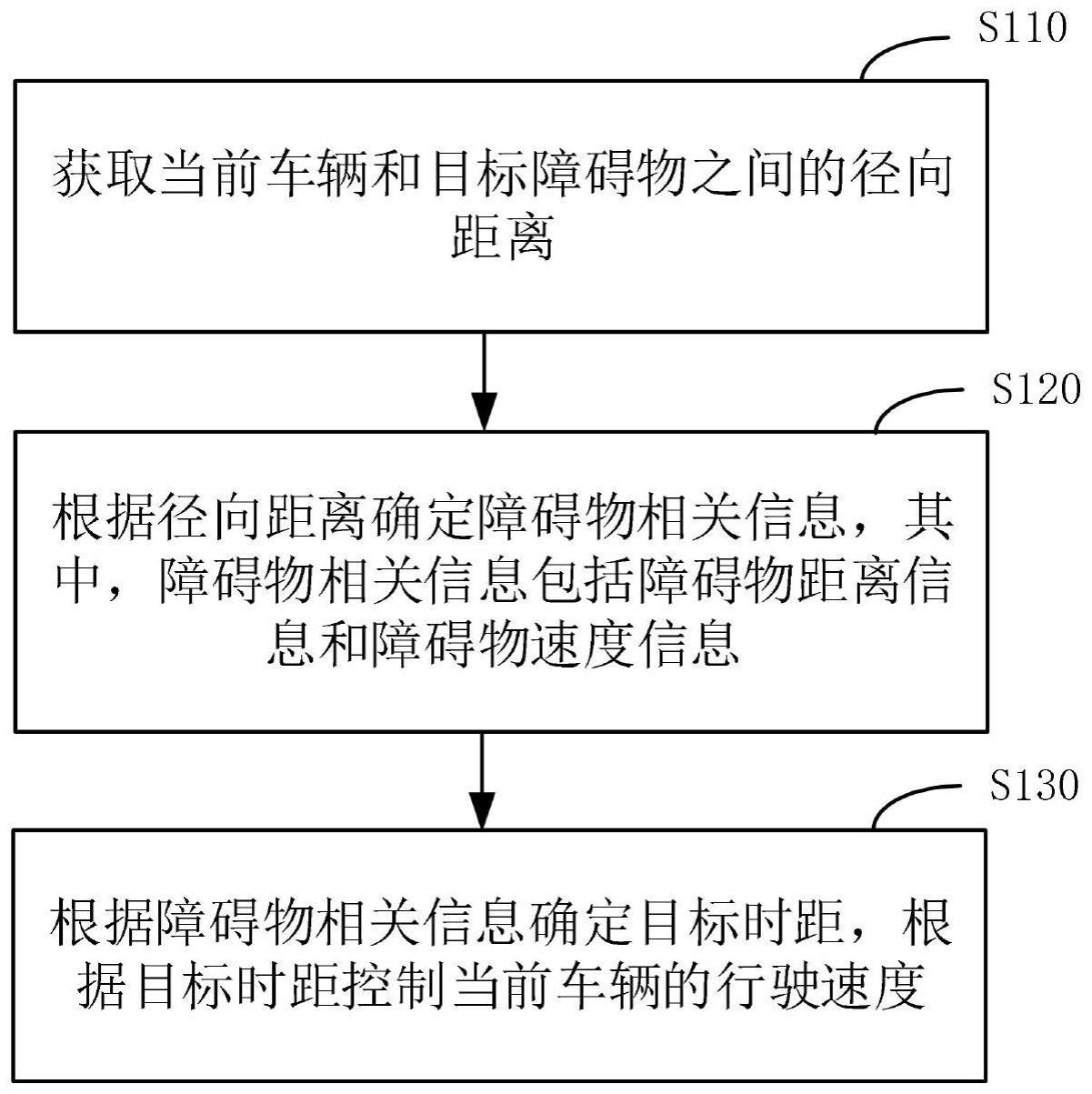
3、获取当前车辆和目标障碍物之间的径向距离;
4、根据径向距离确定障碍物相关信息,其中,障碍物相关信息包括障碍物距离信息和障碍物速度信息;
5、根据障碍物相关信息确定目标时距,根据目标时距控制当前车辆的行驶速度。
6、可选的,在获取当前车辆和目标障碍物之间的径向距离之前,还包括:获取用户输入的指定距离范围;当当前车辆的指定距离范围内存在障碍物时,将障碍物作为目标障碍物,其中,目标障碍物包括前方障碍物和后方障碍物。
7、可选的,获取当前车辆和目标障碍物之间的径向距离,包括:通过当前车辆的毫米波雷达向目标障碍物发送测距信号,并基于测距信号接收返回信号;确定测距信号和返回信号的时间差;确定信号速度,将时间差和信号速度的乘积作为径向距离。
8、可选的,根据径向距离确定障碍物相关信息,包括:将当前车辆中轴线到目标障碍物之间的夹角作为方位角;根据方位角和径向距离确定障碍物距离信息,其中,障碍物距离信息包括障碍物横向距离和障碍物纵向距离;根据障碍物距离信息确定障碍物速度信息,其中,障碍物速度信息包括障碍物横向速度和障碍物纵向速度。
9、可选的,根据障碍物距离信息确定障碍物速度信息,包括:确定帧间隔;获取相邻两帧障碍物横向距离作为目标横向距离,并获取相邻两帧障碍物纵向距离作为目标纵向距离;将目标横向距离和帧间隔的比值作为障碍物横向速度,将目标纵向距离和帧间隔的比值作为障碍物纵向速度。
10、可选的,根据障碍物相关信息确定目标时距,包括:确定障碍物纵向距离和障碍物纵向速度的比值,将比值代入预设范围以确定时距范围;获取用户标定的权重系数,基于时距范围将权重系数结合预设算法以确定目标时距。
11、可选的,根据目标时距控制当前车辆的行驶速度,包括:根据目标时距生成控制信号,并将控制信号发送至车辆执行器;通过车辆执行器根据控制信号控制当前车辆的行驶速度。
12、根据本发明的另一方面,提供了一种自适应巡航车辆控制装置,该装置包括:
13、障碍物径向距离获取模块,用于获取当前车辆和目标障碍物之间的径向距离;
14、障碍物相关信息确定模块,用于根据径向距离确定障碍物相关信息,其中,障碍物相关信息包括障碍物距离信息和障碍物速度信息;
15、目标时距确定及车辆控制模块,用于根据障碍物相关信息确定目标时距,根据目标时距控制当前车辆的行驶速度。
16、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
17、至少一个处理器;以及
18、与所述至少一个处理器通信连接的存储器;其中,
19、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的一种自适应巡航车辆控制方法。
20、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的一种自适应巡航车辆控制方法。
21、本发明实施例的技术方案,通过获取当前车辆和目标障碍物之间的径向距离确定障碍物距离信息和障碍物速度信息,然后根据障碍物相关信息确定目标时距,最后根据目标时距控制当前车辆的行驶速度,综合考虑了前方障碍物和后方障碍物,既能保证本车与前车无安全风险,也能实时调整本车与前车和后车的时距,避免了后车与本车的碰撞风险,使自适应巡航过程中车辆的安全性得到了保障。
22、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种自适应巡航车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述获取当前车辆和目标障碍物之间的径向距离之前,还包括:
3.根据权利要求1所述的方法,其特征在于,所述获取当前车辆和目标障碍物之间的径向距离,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述径向距离确定障碍物相关信息,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述障碍物距离信息确定障碍物速度信息,包括:
6.根据权利要求4所述的方法,其特征在于,所述根据所述障碍物相关信息确定目标时距,包括:
7.根据权利要求1所述的方法,其特征在于,所述根据所述目标时距控制当前车辆的行驶速度,包括:
8.一种自适应巡航车辆控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机存储介质,其特征在于,所述计算机存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的方法。
技术总结
本发明公开了一种自适应巡航车辆控制方法、装置、设备及存储介质。包括:获取当前车辆和目标障碍物之间的径向距离;根据径向距离确定障碍物相关信息,其中,障碍物相关信息包括障碍物距离信息和障碍物速度信息;根据障碍物相关信息确定目标时距,根据目标时距控制当前车辆的行驶速度。通过获取当前车辆和目标障碍物之间的径向距离确定障碍物距离信息和障碍物速度信息,然后根据障碍物相关信息确定目标时距,最后根据目标时距控制当前车辆的行驶速度,综合考虑了前方障碍物和后方障碍物,既能保证本车与前车无安全风险,也能实时调整本车与前车和后车的时距,避免了后车与本车的碰撞风险,使自适应巡航过程中车辆的安全性得到了保障。
技术研发人员:武浩远,佟宇琪,王杨,孟俊峰,芦冰
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!