一种车辆驾驶控制方法、装置及介质与流程
本技术涉及人机共驾,特别涉及一种车辆驾驶控制方法、装置及介质。
背景技术:
1、目前,当前的人机共驾系统主要依据驾驶人和驾驶系统的驾驶能力强弱,来决定由谁来接管驾驶权,主要侧重考虑安全性,但是虽然能够从安全性的角度最大化保障车辆行驶不出事故,但很多场景下的决策过于生硬或状态切换过于突兀,往往在极短时间内发生:例如急减速、刹车、急转弯、急变道等,或者以非常慢的速度行驶来保障安全,这里虽然保障了车辆行驶的安全,但对于商业化落地的技术,目前通过车辆行驶带给驾驶主人优于纯手动驾驶的体验感,与通过更好的舒适性体现共驾系统的优势还存在较大距离。
技术实现思路
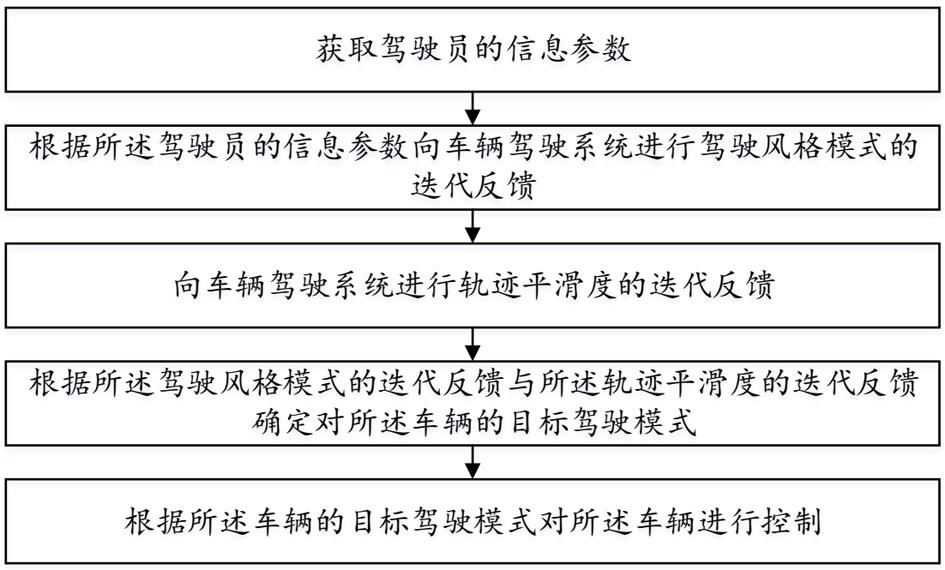
1、为了克服上述技术缺陷,本技术的目的在于提供一种车辆驾驶控制方法、装置及介质,所述方法包括:获取驾驶员的信息参数;根据所述驾驶员的信息参数向车辆驾驶系统进行驾驶风格模式的迭代反馈;向车辆驾驶系统进行轨迹平滑度的迭代反馈; 根据所述驾驶风格模式的迭代反馈与所述轨迹平滑度的迭代反馈确定对所述车辆的目标驾驶模式;根据所述车辆的目标驾驶模式对所述车辆进行控制。本技术的技术方案引入舒适性和安全性相结合的指标,在车辆行驶安全性的前提下,兼顾舒适性或体验性的要求。
2、本技术实施例提供的具体技术方案如下:
3、第一方面,提供了一种车辆驾驶控制方法,所述方法包括:获取驾驶员的信息参数;根据所述驾驶员的信息参数向车辆驾驶系统进行驾驶风格模式的迭代反馈;向车辆驾驶系统进行轨迹平滑度的迭代反馈;根据所述驾驶风格模式的迭代反馈与所述轨迹平滑度的迭代反馈确定对所述车辆的目标驾驶模式;根据所述车辆的目标驾驶模式对所述车辆进行控制。
4、进一步地,所述根据所述驾驶员的信息参数向车辆驾驶系统进行驾驶风格模式的迭代反馈,包括:根据所述驾驶员的信息参数以及车辆驾驶场景确定对所述车辆的第二驾驶模式;通过对所述驾驶员信息参数的聚类分析建立驾驶风格系数模型;判断在所述驾驶风格系数模型中是否存在所述第二驾驶模式的模型匹配;
5、所述根据所述驾驶风格模式的迭代反馈与所述轨迹平滑度的迭代反馈确定对所述车辆的目标驾驶模式,包括:若所述驾驶风格系数模型中存在所述第二驾驶模式的模型匹配,则根据所述驾驶风格模式的迭代反馈与所述轨迹平滑度的迭代反馈确定对所述车辆的目标驾驶模式;
6、或者,所述根据车辆的目标驾驶模式对所述车辆进行控制,包括:若所述驾驶风格系数模型中不存在所述第二驾驶模式的模型匹配,则确定所述第二驾驶模式为所述目标驾驶模式以及根据所述第二驾驶模式对所述车辆进行控制。
7、进一步地,所述根据所述驾驶风格模式的迭代反馈与所述轨迹平滑度的迭代反馈确定对所述车辆的目标驾驶模式之前,所述方法还包括:判断所述第二驾驶模式是否在所述驾驶风格系数模型中训练过;若是,则根据所述车辆驾驶场景以及通过所述驾驶风格模式的迭代反馈获取的驾驶风格系数对驾驶员和/或所述车辆的自动驾驶控制模块的驾驶权系数进行分配;若否,则向所述车辆驾驶系统进行驾驶风格模式的迭代反馈。
8、进一步地,所述通过对所述驾驶员信息参数的聚类分析建立驾驶风格系数模型,包括:通过对所述驾驶员的信息参数的聚类分析获取驾驶风格分类数据;通过驾驶风格训练程序对所述驾驶风格分类数据进行训练;通过驾驶风格辨识模型对训练过的驾驶风格分类数据进行辨识精度测试;根据辨识精度测试后的驾驶风格分类数据建立驾驶风格系数模型。
9、进一步地,所述根据所述驾驶风格模式的迭代反馈与轨迹平滑度的迭代反馈确定对所述车辆的目标驾驶模式,包括:通过所述驾驶风格模式的迭代反馈获取驾驶风格系数,通过所述轨迹平滑度的迭代反馈获取平滑度系数,根据所述驾驶风格系数以及平滑度系数确定舒适度系数值,根据所述舒适度系数值以及舒适度模式与舒适度系数范围值的映射关系表确定对所述车辆的第一驾驶模式为所述目标驾驶模式;所述根据所述车辆的目标驾驶模式对所述车辆进行控制,包括:根据所述第一驾驶模式对所述车辆进行控制。
10、进一步地,所述向车辆驾驶系统进行轨迹平滑度的迭代反馈,包括:通过高精导航地图获取所述车辆预规划路径的行车轨迹途经点;所述根据所述第一驾驶模式对所述辆进行控制之前,所述方法还包括:判断所述车辆预规划路径行车轨迹途经点的平滑度是否经过平滑度轨迹曲线拟合算法进行拟合;所述根据所述第一驾驶模式对所述车辆进行控制,包括:若所述车辆预规划路径行车轨迹途经点的平滑度已经过平滑度轨迹曲线拟合算法进行拟合,则根据所述车辆的第一驾驶模式对所述车辆进行控制。
11、进一步地,所述方法还包括:若所述车辆预规划路径行车轨迹途经点的平滑度未经过平滑度轨迹曲线拟合算法进行拟合,则通过平滑度轨迹曲线拟合算法对所述车辆预规划路径的行车轨迹途经点进行平滑性处理,并向车辆驾驶系统提供平滑性修正参数以及驾驶权系数分配结果;
12、其中,所述向车辆驾驶系统提供平滑性修正参数,包括:
13、获取机器驾驶参数a,获取驾驶人驾驶参数b,其中x= a与b的比值;通过公式y=f(x)= c + b x+ ax2,计算安全舒适度y,其中a、b、c为特定常数;通过最小二乘法二次多项式矩阵算法确定高精导航地图轨迹曲线函数f(x);通过驾驶员监控系统获取驾驶人驾驶车辆的方向盘转向力f1,获取机器驾驶车辆的方向盘转向力f2,获取机器驾驶车辆的方向盘转向力和驾驶人驾驶车辆的方向盘转向力的拟合合力f3;通过高精导航地图轨迹曲线函数f(x)获取f1与f2的偏转角θ;通过欧拉函数公式cos(180° -θ) =((k*f1)2+f22- f32)/2* k*f1* f2,计算平滑性修正参数k。
14、进一步地,所述根据所述驾驶风格系数以及平滑度系数确定舒适度系数值,包括:获取驾驶员性别对应的预设安全系数,获取驾驶员年龄对应的预设安全系数,获取车辆加速度对应的预设安全系数,获取车辆行驶速度对应的预设安全系数;其中,驾驶风格系数等于驾驶员性别对应的预设安全系数、驾驶员年龄对应的预设安全系数、车辆加速度对应的预设安全系数、车辆行驶速度对应的预设安全系数四者的乘积;
15、获取车辆轨迹途经点偏转角α,常量m;
16、通过公式,计算方差s(x);
17、通过公式平滑性系数 = m * 方差s(x),计算平滑性系数;
18、通过公式舒适度系数=平滑性系数 / 驾驶风格系数,计算舒适度系数值。
19、第二方面,提供了一种车辆驾驶控制装置,所述装置包括:获取模块,用于获取驾驶员的信息参数;反馈模块,用于根据所述驾驶员的信息参数向车辆驾驶系统进行驾驶风格模式的迭代反馈,向车辆驾驶系统进行轨迹平滑度的迭代反馈;确认模块,用于根据所述驾驶风格模式的迭代反馈与所述轨迹平滑度的迭代反馈确定对所述车辆的目标驾驶模式;控制模块,用于根据所述车辆的目标驾驶模式对所述车辆进行控制。
20、第三方面,提供了一种计算机设备,所述设备包括:存储器、处理器及存储在存储器上的计算机程序,所述处理器执行所述计算机程序以实现如第一方面任一所述的车辆驾驶控制方法的步骤。
21、第四方面,提供了一种计算机存储介质,所述介质包括:其上存储有计算机程序,该计算机程序被处理器执行时实现第一方面任一所述的车辆驾驶控制方法的步骤。
22、与现有技术相比,本技术实施例提供的技术方案的所述车辆驾驶控制方法包括:获取驾驶员的信息参数;根据所述驾驶员的信息参数向车辆驾驶系统进行驾驶风格模式的迭代反馈;向车辆驾驶系统进行轨迹平滑度的迭代反馈; 根据所述驾驶风格模式的迭代反馈与所述轨迹平滑度的迭代反馈确定对所述车辆的目标驾驶模式;根据所述车辆的目标驾驶模式对所述车辆进行控制。本技术的技术方案引入舒适性和安全性相结合的指标,并使用两个维度的均衡分配算法,在车辆行驶安全性的前提下,兼顾舒适性或体验性的要求。
23、本技术实施例提供的技术方案分别引入驾驶风格系数、轨迹平滑性系数、舒适性因素指标,融合不同驾驶风格和不同驾驶能力作为驾驶权分配的衡量输入,通过驾驶风格模式和轨迹平滑度的双闭环迭代反馈,随驾驶员驾驶时间增长而更贴近个性化趋势。
24、本技术实施例提供的技术方案可以根据不同的驾驶人群的习性和喜好,通过不断迭代反馈,逐步优化驾驶行为参数,最终结合个性化的账号系统,达到最适合驾驶员驾驶的理想方式。
25、本技术实施例提供的技术方案可以通过融合驾驶人的驾驶习性因素,突出 驾驶的舒适性;通过融合驾驶人或机器驾驶能力安全性因素,突出驾驶的安全性,以及通过多次数据的驾驶风格模式、轨迹平滑度反馈积累,基于驾驶风格系数模型逐步达到在不同风格、不同驾驶能力下都有理想的驾驶权系数分配占比,最终达到即可兼顾安全性又可兼顾舒适性的驾驶状态。
- 还没有人留言评论。精彩留言会获得点赞!