一种具有充电对准机构的移动充电机器人的制作方法
本发明涉及移动充电机器人,尤其是涉及一种具有充电对准机构的移动充电机器人。
背景技术:
1、移动充电机器人解除了车与桩的强绑定关系,将车找桩变为桩找车,同时利用碎片化时间充电,对于有里程焦虑和缺乏安全感的电动车主来说,充电这件事将变得友好、便利。移动自动充电机器人产品主要由机器人底盘、机械臂、视觉系统和控制系统等组成,充电机器人首先需要识别储能机器人的充电枪位置,然后基于视觉系统对充电枪的位姿进行定位和识别,扫描获取点云数据,引导机械臂取下充电枪,并插入车辆充电口,该方案对机器视觉系统的定位识别精度和机械臂的控制精度都有很高的要求,要达到上述高精度要求,需要的成本较高,且在实际运用过程中,充电枪的插拔过程中容易出现卡死现象。
技术实现思路
1、本发明为了克服现有技术对充电机器人中对视觉系统的定位识别精度和机械臂的控制精度的要求过高的不足,提供一种具有充电对准机构的移动充电机器人,降低了对视觉对准系统的对准精度要求,降低了视觉对准系统的制造成本,实现了视觉对准系统难以实现的毫米级以下的插接精度。
2、为了实现上述目的,本发明采用以下技术方案:
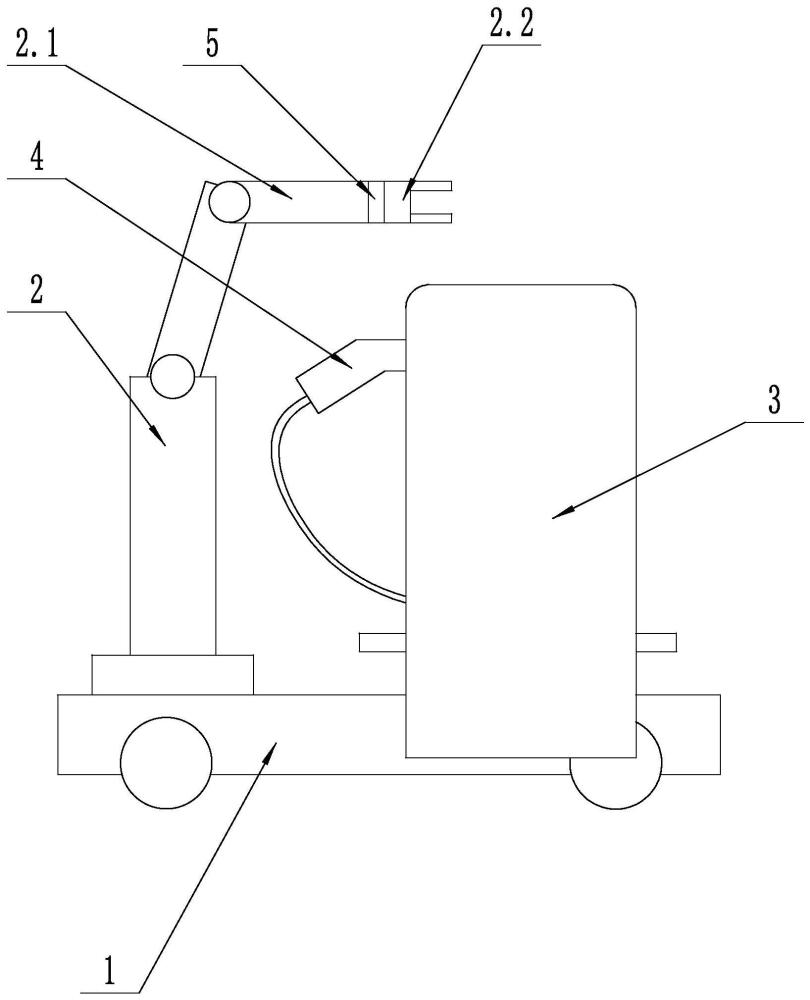
3、一种具有充电对准机构的移动充电机器人,包括能够地面上移动的移动底座、具有视觉对准系统的引导机械臂和设置在移动底座上的储能组件,所述引导机械臂安装于所述移动底座,所述储能组件上安装有与储能组件电连接的充电枪,所述引导机械臂包括用于夹紧充电枪的夹紧组件和用于使夹紧组件在三维空间内移动的机械臂本体,所述夹紧组件与所述机械臂本体之间通过充电对准机构连接,所述充电对准机构包括安装在机械臂本体上的第一连接件、固定在夹紧组件上的第二连接件和用于连接两者的第一弹性件,第一连接件与第二连接件转动连接,所述第一弹性件使第二连接件相对第二连接件保持在第一周向位置,所述第二连接件受到周向外力且周向外力大于第一弹性件的弹力时,所述第二连接件能够相对第一连接件转动并偏离第一周向位置。
4、上述技术方案中,所述夹紧组件能夹持所述充电枪,并通过移动传动电机器人上的视觉对准系统大致对准车辆充电口,然后将充电枪缓慢插入车辆充电口,所述车辆充电口开口位置和充电枪的端部一般都设有倒角结构,当所述充电枪相对车辆充电口存在一定的角度误差时,所述车辆充电口会对充电枪产生一个周向外力,所述第二连接件受到周向外力且周向外力大于第一弹性件的弹力时,所述第二连接件能够相对第一连接件转动并偏离第一周向位置,使充电枪对准车辆充电口,在引导机械臂的继续作用下,所述充电枪能够准确插入车辆充电口。通过设置充电对准机构,使移动传动电机器人上的视觉对准系统只需大致对准车辆充电口即可,降低了对视觉对准系统的对准精度要求,降低了视觉对准系统的制造成本,实现了视觉对准系统难以实现的毫米级以下的插接精度。
5、作为优选,所述第一弹性件包括第一伸缩弹簧和第二伸缩弹簧,所述第一连接件上固定有第一支撑块和第二支撑块,所述第二连接件上固定有固定块,在第二连接件的转动方向上,所述第一支撑块、第一伸缩弹簧、固定块、第二伸缩弹簧和第二支撑块依次设置,且所述第一伸缩弹簧的两端分别抵紧第一支撑块和固定块,所述第二伸缩弹簧的两端分别抵紧固定块和第二支撑块。
6、上述技术方案可以实现第一弹性件对第二连接件的复位作用,不论第二连接件相对第一连接件向哪一侧转动,均能够通过第一伸缩弹簧或第二伸缩弹簧进行复位。
7、作为优选,所述第一连接件上固定有第三支撑块,所述第三支撑块设置在第一支撑块和第二支撑块之间,所述第一伸缩弹簧设置在第一支撑块和第三支撑块之间,所述第二伸缩弹簧设置在第二支撑块和第三支撑块之间,所述第二连接件处于第一周向位置时,所述第一伸缩弹簧远离第一支撑块的一端同时抵紧固定块和第三支撑块,所述第二伸缩弹簧远离第二支撑块的一端同时抵紧固定块和第三支撑块,所述第二连接件向第一支撑块一侧偏离第一周向位置时,所述第一伸缩弹簧与固定块抵紧的一端脱离第三支撑块,所述第二伸缩弹簧抵紧第三支撑块的一端脱离固定块,所述第一伸缩弹簧和第二伸缩弹簧处于预压紧状态,所述第二连接件向第二支撑块一侧偏离第一周向位置时,所述第二伸缩弹簧与固定块抵紧的一端脱离第三支撑块,所述第一伸缩弹簧抵紧第三支撑块的一端脱离固定块。
8、上述技术方案可以使第二连接件稳定保持在第一周向位置,避免第一伸缩弹簧和第二伸缩弹簧的弹性相互干扰。
9、作为优选,所述第一弹性件包括第一伸缩弹簧和第二伸缩弹簧,所述第二连接件上固定有第一支撑块和第二支撑块,所述第一连接件上固定有固定块,在第二连接件的转动方向上,所述第一支撑块、第一伸缩弹簧、固定块、第二伸缩弹簧和第二支撑块依次设置,且所述第一伸缩弹簧的两端分别抵紧第一支撑块和固定块,所述第二伸缩弹簧的两端分别抵紧固定块和第二支撑块。
10、上述技术方案可以实现第一弹性件对第二连接件的复位作用,不论第二连接件相对第一连接件向哪一侧转动,均能够通过第一伸缩弹簧或第二伸缩弹簧进行复位。
11、作为优选,所述第二连接件上固定有第三支撑块,所述第三支撑块设置在第一支撑块和第二支撑块之间,所述第一伸缩弹簧设置在第一支撑块和第三支撑块之间,所述第二伸缩弹簧设置在第二支撑块和第三支撑块之间,所述第二连接件处于第一周向位置时,所述第一伸缩弹簧远离第一支撑块的一端同时抵紧固定块和第三支撑块,所述第二伸缩弹簧远离第二支撑块的一端同时抵紧固定块和第三支撑块,第一伸缩弹簧和第二伸缩弹簧处于预压紧状态,所述第一连接件向第一支撑块一侧偏离第一周向位置时,所述第一伸缩弹簧与固定块抵紧的一端脱离第三支撑块,所述第二伸缩弹簧抵紧第三支撑块的一端脱离固定块,所述第一连接件向第二支撑块一侧偏离第一周向位置时,所述第二伸缩弹簧与固定块抵紧的一端脱离第三支撑块,所述第一伸缩弹簧抵紧第三支撑块的一端脱离固定块。
12、上述技术方案可以使第二连接件稳定保持在第一周向位置,避免第一伸缩弹簧和第二伸缩弹簧的弹性相互干扰。
13、作为优选,所述第一连接件上设有第一限位块,所述第二连接件上固定有两个第二限位块,所述第一限位块设置在两个第二限位块之间,以限制所述第二连接件相对所述第一连接件的转动角度;或,所述第一连接件上设有两个第一限位块,所述第二连接件上固定有第二限位块,所述第二限位块设置在两个第一限位块之间,以限制所述第二连接件相对所述第一连接件的转动角度。
14、上述技术方案可以通过第一限位块和第二限位块实现对第二连接件相对所述第一连接件的转动角的限制,避免第二连接件的转动角度过大。
15、作为优选,所述充电对准机构还包括第二弹性件和顶紧件,所述顶紧件滑动设置在第一连接件上,所述第二连接件上设有与顶紧件一端适配的定位槽,所述第二弹性件两端分别连接第一连接件和顶紧件,以使顶紧件的一端伸出第一连接件并伸入定位槽,所述定位槽的底面为弧形面或斜面,以使顶紧件伸入定位槽的一端能够沿着定位槽的底面滑出定位槽,所述顶紧件的一端伸入定位槽时,所述第二连接件相对第一连接件保持在第一周向位置。
16、上述技术方案在第一连接件不受周向外力时,增加了第二连接件保持在第一周向位置的稳定性。当第二连接件处于第一周向位置时,即使第一伸缩弹簧和第二伸缩弹簧对第二连接件的弹力不平衡,所述第二连接件也可以稳定地处于第一周向位置,只有当第二连接件所受外力足够大,使顶紧件的一端够脱离定位槽时,所述第二连接件才会相对第一连接件转动。
17、作为优选,所述充电对准机构还包括第二弹性件和顶紧件,所述顶紧件滑动设置在第二连接件上,所述第一连接件上设有与顶紧件一端适配的定位槽,所述第二弹性件两端分别连接第二连接件和顶紧件,以使顶紧件的一端伸出第二连接件并伸入定位槽,所述定位槽的底面为弧形面或斜面,以使顶紧件伸入定位槽的一端能够沿着定位槽的底面滑出定位槽,所述顶紧件的一端伸入定位槽时,所述第二连接件相对第一连接件保持在第一周向位置。
18、上述技术方案在第一连接件不受周向外力时,增加了第二连接件保持在第一周向位置的稳定性。当第二连接件处于第一周向位置时,即使第一伸缩弹簧和第二伸缩弹簧对第二连接件的弹力不平衡,所述第二连接件也可以稳定地处于第一周向位置,只有当第二连接件所受外力足够大,使顶紧件的一端够脱离定位槽时,所述第二连接件才会相对第一连接件转动。
19、作为优选,所述机械臂本体与第一连接件之间通过球铰接结构连接,所述机械臂本体与第一连接件之间设有第三弹性件,所述第三弹性件使所述第一连接件相对机械臂本体保持在中心位置,所述第一连接件受到外力且外力大于第三弹性件的弹力时,所述第一连接件能够相对机械臂本体偏离中心位置。
20、上述技术方案中,当所述充电枪的轴线与相对车辆充电口的轴线存在一定的角度误差时,所述车辆充电口会对充电枪产生一个径向外力,所述第二连接件受到径向外力且径向外力大于第三弹性件的弹力时,所述第二连接件能够以所述球铰接结构的转动中心为转动支点相对第一连接件转动并偏离中心位置,使所述充电枪的轴线对准车辆充电口的轴线,在引导机械臂的继续作用下,所述充电枪能够准确插入车辆充电口。上述方案使第二连接件相对第一连接件具有一定的浮动范围,通过设置上述结构,使移动传动电机器人上的视觉对准系统只需大致对准车辆充电口即可,降低了对视觉对准系统的对准精度要求,降低了视觉对准系统的制造成本,实现了视觉对准系统难以实现的毫米级以下的插接精度。如果不设置上述充电对准机构,在充电枪未对准车辆充电口的情况下,可能会出现卡死的情况,可能会损坏充电枪或车辆充电口。
21、作为优选,所述球铰接结构包括设置在第一连接件上外凸的第三球形面、设置在机械臂本体上内凹的第四球形面和套设在第三球形面上的第二弹性套,所述第四球形面与第二弹性套适配且套设在第二弹性套外侧,第二弹性套与所述第四球形面之间涂抹有润滑脂,所述第二弹性套的厚度小于所述第一弹性套。
22、上述技术方案中,当所述充电枪部分插入车辆充电口且所述充电枪的轴线与相对车辆充电口的轴线存在一定的角度误差时,所述车辆充电口会对充电枪产生一个径向外力,此时可以以充电枪与车辆充电口的接触点为转动支点,在机械臂本体不发生偏移的情况下,使充电枪相对车辆充电口转动。
23、作为优选,所述机械臂本体上设有至少2个传感器,所述第一连接件克服第三弹性件的弹力相对机械臂本体偏离中心位置时,所述第一连接件靠近并触发传感器,所述传感器与引导机械臂的控制器电连接。
24、上述技术方案中,2个传感器分别用于检测两个垂直的径向的偏移信号,当所述传感器被触发,说明第一连接件相对机械臂本体的偏移量已经很大,可能出现即使第一连接件已经达到最大,仍无法使充电枪的轴线与车辆充电口的轴线对齐的情况,此时需要主动调节机械臂本体的位置,机械臂本体可以根据传感器的信号向对应的位置进行适量的偏移,以使充电枪的轴线与车辆充电口的轴线对齐。
- 还没有人留言评论。精彩留言会获得点赞!