车辆越过台阶的极限能力计算方法与流程
本申请涉及车辆设计,尤其涉及一种车辆越过台阶的极限能力计算方法。
背景技术:
1、目前整车厂只有动力性经济性指标,无通过性指标。但客户在实际车辆使用时需要考虑整车通过性;除了接近角和离去角的参数,汽车越过台阶的能力也是影响整车通过性的重要参数之一,然而目前很多车辆并没办法直接给出该参数,实际驾驶时经常会遇到台阶等路况,因此亟需将越过台阶的极限能力作为整车通过性的参数之一。
技术实现思路
1、为了解决上述技术问题,本申请提供了一种车辆越过台阶的极限能力计算方法。
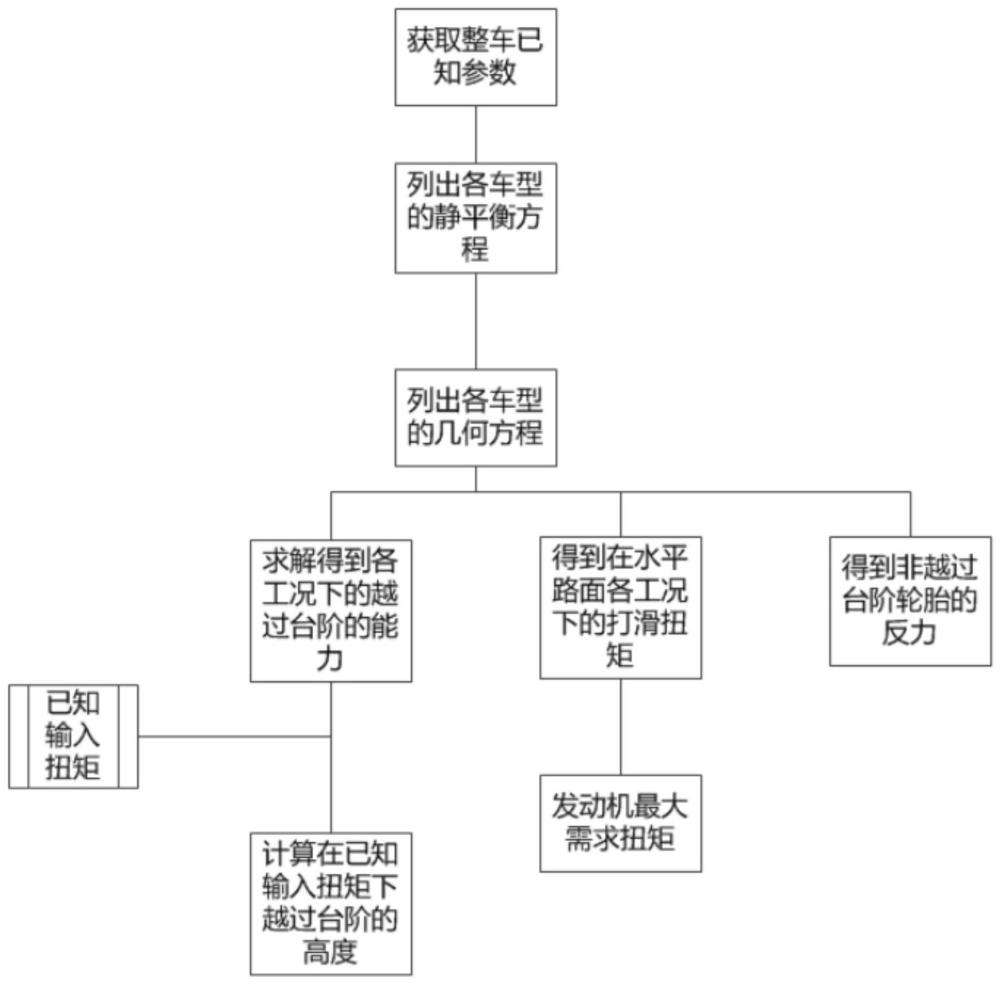
2、本申请提供了一种车辆越过台阶的极限能力计算方法,包括如下步骤:
3、s1、获取整车参数;
4、s2、列出各车型在不同工况下的静平衡方程,车型包括前驱车型和后驱车型,工况包括前进挡时,前轮越过台阶和后轮越过台阶两种情况,还包括倒挡时,前轮越过台阶和后轮越过台阶两种情况;
5、s3、列出各车型在当前工况下的几何方程;
6、s4、将发动机的最大扭矩值代入到各个静平衡方程中,得到不同车型在各个工况下车辆越过台阶的能力,也就是越过台阶的高度。
7、可选的,所述步骤s2和步骤s3具体为,车型为后驱车型,并且位于前进挡时,此时如果前轮准备越过台阶,则静平衡方程为:
8、
9、f1sinα-ff1cosα+f2-g=0
10、
11、几何方程为:
12、
13、由于f一般为0.018左右,忽略,静力学平衡方程变为:
14、
15、f1sinα+f2-g=0
16、
17、推导得到:
18、
19、
20、其中φf2为打滑状态下的最大牵引力,可以确认该状态下的最大输入扭矩:
21、
22、由于已知输入扭矩,则可以推导出:
23、
24、f1cosα-ft=0
25、f1sinα+f2-g=0;
26、进而可以计算实际越过台阶的高度:
27、
28、可选的,所述步骤s2和步骤s3具体为,车型为后驱车型,并且位于前进挡时,此时如果后轮准备越过台阶,则静平衡方程为:
29、
30、
31、
32、几何方程为:
33、
34、由于f一般为0.018左右,忽略,静力学平衡方程变为:
35、
36、
37、
38、推导得到:
39、
40、
41、其中φf2为打滑状态下的最大牵引力,可以确认该状态下的最大输入扭矩:
42、
43、由于已知输入扭矩,则可以推导出:
44、
45、
46、进而可以计算实际越过台阶的高度:
47、
48、可选的,所述步骤s2和步骤s3具体为,车型为前驱车型,并且位于前进挡时,此时如果前轮准备越过台阶,则静平衡方程为:
49、
50、
51、
52、几何方程为:
53、
54、由于f一般为0.018左右,忽略,静力学平衡方程变为:
55、
56、
57、
58、推导得到:
59、
60、
61、其中φf1为打滑状态下的最大牵引力,可以确认该状态下的最大输入扭矩:
62、
63、由于已知输入扭矩,则可以推导出:
64、
65、
66、进而可以计算实际越过台阶的高度:
67、
68、可选的,所述步骤s2和步骤s3具体为,车型为前驱车型,并且位于前进挡时,此时如果后轮准备越过台阶,则静平衡方程为:
69、
70、f1+f2cosα-ff2sinα-g=0
71、
72、几何方程为:
73、
74、由于f一般为0.018左右,忽略,静力学平衡方程变为:
75、
76、f1+f2cosα-g=0
77、
78、推导得到:
79、
80、
81、其中φf1为打滑状态下的最大牵引力,可以确认该状态下的最大输入扭矩:
82、
83、由于已知输入扭矩,则可以推导出:
84、
85、进而可以计算实际越过台阶的高度:
86、
87、可选的,所述步骤s2和步骤s3具体为,车型为后驱车型,并且位于倒挡时,此时如果后轮准备越过台阶,则静平衡方程为:
88、
89、
90、
91、几何方程为:
92、
93、由于f一般为0.018左右,忽略,静力学平衡方程变为:
94、
95、
96、
97、推导得到:
98、
99、
100、其中φf1为打滑状态下的最大牵引力,可以确认该状态下的最大输入扭矩:
101、
102、由于已知输入扭矩,则可以推导出:
103、
104、
105、进而可以计算实际越过台阶的高度:
106、
107、可选的,所述步骤s2和步骤s3具体为,车型为后驱车型,并且位于倒挡时,此时如果前轮准备越过台阶,则静平衡方程为:
108、
109、f1+f2cosα-ff2sinα-g=0
110、
111、几何方程为:
112、
113、由于f一般为0.018左右,忽略,静力学平衡方程变为:
114、
115、f1+f2cosα-g=0
116、
117、推导得到:
118、
119、
120、其中φf1为打滑状态下的最大牵引力,可以确认该状态下的最大输入扭矩:
121、
122、由于已知输入扭矩,则可以推导出:
123、
124、进而可以计算实际越过台阶的高度:
125、
126、本申请实施例提供的技术方案与现有技术相比具有如下优点:
127、本申请提供的车辆越过台阶的极限能力计算方法,通过联立各车型的静平衡方程,以及将发动机的最大扭矩值作为已知参数的代入,进而能够计算出各种车型在各个工况下越过台阶的极限高度。
技术特征:
1.一种车辆越过台阶的极限能力计算方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的车辆越过台阶的极限能力计算方法,其特征在于,所述步骤s2和步骤s3具体为,车型为后驱车型,并且位于前进挡时,此时如果前轮准备越过台阶,则静平衡方程为:
3.根据权利要求1所述的车辆越过台阶的极限能力计算方法,其特征在于,所述步骤s2和步骤s3具体为,车型为后驱车型,并且位于前进挡时,此时如果后轮准备越过台阶,则静平衡方程为:
4.根据权利要求1所述的车辆越过台阶的极限能力计算方法,其特征在于,所述步骤s2和步骤s3具体为,车型为前驱车型,并且位于前进挡时,此时如果前轮准备越过台阶,则静平衡方程为:
5.根据权利要求1所述的车辆越过台阶的极限能力计算方法,其特征在于,所述步骤s2和步骤s3具体为,车型为前驱车型,并且位于前进挡时,此时如果后轮准备越过台阶,则静平衡方程为:
6.根据权利要求1所述的车辆越过台阶的极限能力计算方法,其特征在于,所述步骤s2和步骤s3具体为,车型为后驱车型,并且位于倒挡时,此时如果后轮准备越过台阶,则静平衡方程为:
7.根据权利要求1所述的车辆越过台阶的极限能力计算方法,其特征在于,所述步骤s2和步骤s3具体为,车型为后驱车型,并且位于倒挡时,此时如果前轮准备越过台阶,则静平衡方程为:
技术总结
本申请涉及车辆设计技术领域,尤其涉及一种车辆越过台阶的极限能力计算方法。该车辆越过台阶的极限能力计算方法包括如下步骤:S1、获取整车参数;S2、列出各车型在不同工况下的静平衡方程,车型包括前驱车型和后驱车型,工况包括前进挡时,前轮越过台阶和后轮越过台阶两种情况,还包括倒挡时,前轮越过台阶和后轮越过台阶两种情况;S3、列出各车型在当前工况下的几何方程;S4、将发动机的最大扭矩值代入到各个静平衡方程中,得到不同车型在各个工况下车辆越过台阶的能力,也就是越过台阶的高度。该计算方法,通过联立各车型的静平衡方程,以及将发动机的最大扭矩值作为已知参数的代入,进而能够计算出各种车型在各个工况下越过台阶的极限高度。
技术研发人员:苑衍灵,刘彦军,刘肖,宋廷彬,高晓光
受保护的技术使用者:盛瑞传动股份有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!