一种车辆控制方法、装置及电子设备和存储介质与流程
本技术涉及车辆控制,更具体地说,涉及一种车辆控制方法、装置及电子设备和存储介质。
背景技术:
1、横向控制为通过对方向盘角度的控制实现对车辆横向偏差的控制方法。在相关技术中的车辆横向控制方案中,目标为车辆转向轮转角尽量小,也即方向盘打的角度尽量小,但是评估车辆横向控制效果的性能指标是横向偏差和航向角偏差尽量小,同时方向盘摆动尽量小,方向盘摆动量小与方向盘角度小不是同一个概念,可见,在相关技术中的车辆横向控制方案不能直接有效地调节评估控制效果的三个性能指标。
2、因此,如何在车辆横向控制中使得横向偏差、航向角偏差、方向盘摆动这三个性能指标尽量小,提高车辆横向控制效果是本领域技术人员需要解决的技术问题。
技术实现思路
1、本技术的目的在于提供一种车辆控制方法、装置及一种电子设备和一种计算机可读存储介质,提高了车辆横向控制效果。
2、为实现上述目的,本技术提供了一种车辆控制方法,包括:
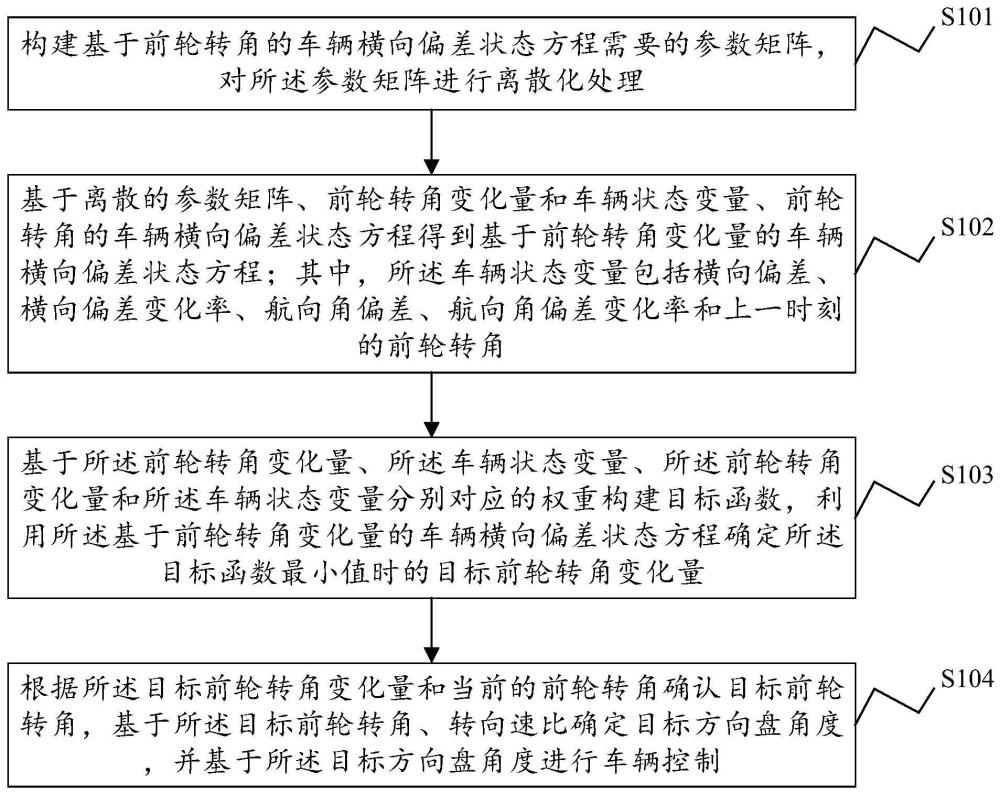
3、构建基于前轮转角的车辆横向偏差状态方程需要的参数矩阵,对所述参数矩阵进行离散化处理;
4、基于离散的参数矩阵、前轮转角变化量和车辆状态变量、前轮转角的车辆横向偏差状态方程得到基于前轮转角变化量的车辆横向偏差状态方程;其中,所述车辆状态变量包括横向偏差、横向偏差变化率、航向角偏差、航向角偏差变化率和上一时刻的前轮转角;
5、基于所述前轮转角变化量、所述车辆状态变量、所述前轮转角变化量和所述车辆状态变量分别对应的权重构建目标函数,利用所述基于前轮转角变化量的车辆横向偏差状态方程确定所述目标函数最小值时的目标前轮转角变化量;
6、根据所述目标前轮转角变化量和当前的前轮转角确认目标前轮转角,基于所述目标前轮转角、转向速比确定目标方向盘角度,并基于所述目标方向盘角度进行车辆控制。
7、其中,所述基于前轮转角变化量的车辆横向偏差状态方程为:k+1时刻的车辆状态变量为k时刻的第一乘积与k时刻的第二乘积的和,所述k时刻的第一乘积为k时刻的前轮转角变化量与第一参数矩阵的乘积,所述k时刻的第二乘积为k时刻的前轮转角变化量与第二参数矩阵的乘积,所述第一参数矩阵为基于车辆的前轮单轮侧偏刚度、后轮单轮侧偏刚度、前悬长度、后悬长度、纵向速度、整车质量、转动惯量构建的参数矩阵,所述第二参数矩阵为基于所述前轮单轮侧偏刚度、所述前悬长度、所述整车质量、所述转动惯量构建的参数矩阵,所述转动惯量为绕z轴的转动惯量,z轴为垂直于地面方向的轴。
8、其中,所述基于前轮转角变化量的车辆横向偏差状态方程为:
9、xinc(k+1)=ainc_dxinc(k)+binc_duinc(k);
10、其中,xinc(k)为k时刻的车辆状态变量,xinc(k+1)为k+1时刻的车辆状态变量,uinc(k)=δu(k),为k时刻的前轮转角变化量,ad为离散的第一参数矩阵,bd为离散的第二参数矩阵。
11、其中,所述目标函数为所有时刻对应的目标和值的求和,k时刻对应的目标和值为k时刻的第三乘积与k时刻的第四乘积的和,所述k时刻的第三乘积为k时刻的车辆状态变量的转置、第一权重矩阵、所述k时刻的车辆状态变量的乘积,所述k时刻的第四乘积为k时刻的前轮转角变化量的转置、第二权重矩阵、所述k时刻的前轮转角变化量的乘积,所述第一权重矩阵为所述车辆状态变量对应的权重构建的矩阵,所述第二权重矩阵为所述前轮转角变化量对应的权重。
12、其中,所述目标函数为:xinc(k)为k时刻的车辆状态变量,为xinc(k)的转置,uinc(k)=δu(k),为k时刻的前轮转角变化量,为uinc(k)的转置,qinc为所述第一权重矩阵,rinc为所述第二权重矩阵。
13、其中,所述利用所述基于前轮转角变化量的车辆横向偏差状态方程确定所述目标函数最小值时的目标前轮转角变化量,包括:
14、根据所述基于前轮转角变化量的车辆横向偏差状态方程和所述目标函数构建riccati方程,确定所述riccati方程收敛时的目标方程值;
15、基于所述目标方程值、所述离散的参数矩阵、所述前轮转角变化量对应的权重确定中间矩阵;
16、基于所述中间矩阵和所述调整后的状态变量矩阵确定目标前轮转角变化量。
17、其中,还包括:
18、确定所述横向偏差、所述横向偏差变化率、所述航向角偏差、所述航向角偏差变化率和所述前轮转角变化量分别对应的基准权重;
19、根据当前车速确定所述横向偏差、所述航向角偏差和所述前轮转角变化量分别对应的车速权重系数;
20、根据当前曲率半径确定所述横向偏差、所述航向角偏差和所述前轮转角变化量分别对应的曲率半径权重系数;
21、将所述横向偏差变化率、所述航向角偏差变化率分别对应的基准权重分别作为所述横向偏差变化率、所述航向角偏差变化率对应的最终权重;
22、将所述横向偏差、所述航向角偏差和所述前轮转角变化量分别对应的基准权重、车速权重、曲率半径权重的乘积分别作为所述横向偏差、所述航向角偏差和所述前轮转角变化量分别对应的最终权重。
23、其中,所述确定所述横向偏差、所述横向偏差变化量、所述航向角偏差、所述航向角偏差变化率和所述前轮转角变化率分别对应的基准权重之前,还包括:
24、将所有车速权重和所有曲率半径权重设置为基准值;
25、以基准车速在直道上标定,将所述横向偏差、所述横向偏差变化率、所述航向角偏差、所述航向角偏差变化对应的基准权重设置为基准值,调整所述前轮转角变化量对应的基准权重直至方向盘摆动在期望指标内,调整所述横向偏差、所述航向角偏差对应的基准权重直至所述横向偏差和所述航向角偏差在期望指标内;
26、以不同车速在直道上标定,调整所述前轮转角变化量对应的车速权重系数直至方向盘摆动在期望指标内,调整所述横向偏差、所述航向角偏差对应的车速权重系数直至所述横向偏差和所述航向角偏差在期望指标内;
27、以所述基准车速在不同曲率半径的弯道上进行标定,调整所述前轮转角变化量对应的曲率半径权重系数直至方向盘摆动在期望指标内,调整所述横向偏差、所述航向角偏差对应的曲率半径权重系数直至所述横向偏差和所述航向角偏差在期望指标内;
28、以不同车速测试在不同曲率半径的弯道上的控制效果,当不满足期望指标时,调整对应的曲率半径权重系数直至满足对应的期望指标。
29、为实现上述目的,本技术提供了一种车辆控制装置,包括:
30、构建模块,用于构建基于前轮转角的车辆横向偏差状态方程需要的参数矩阵,对所述参数矩阵进行离散化处理;
31、第一确定模块,用于基于离散的参数矩阵、前轮转角变化量和车辆状态变量、前轮转角的车辆横向偏差状态方程得到基于前轮转角变化量的车辆横向偏差状态方程;其中,所述车辆状态变量包括横向偏差、横向偏差变化率、航向角偏差、航向角偏差变化率和上一时刻的前轮转角;
32、第二确定模块,用于基于所述前轮转角变化量、所述车辆状态变量、所述前轮转角变化量和所述车辆状态变量分别对应的权重构建目标函数,利用所述基于前轮转角变化量的车辆横向偏差状态方程确定所述目标函数最小值时的目标前轮转角变化量;
33、控制模块,用于根据所述目标前轮转角变化量和当前的前轮转角确认目标前轮转角,基于所述目标前轮转角、转向速比确定目标方向盘角度,并基于所述目标方向盘角度进行车辆控制。
34、为实现上述目的,本技术提供了一种电子设备,包括:
35、存储器,用于存储计算机程序;
36、处理器,用于执行计算机程序时实现如上述车辆控制方法的步骤。
37、为实现上述目的,本技术提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器执行时实现如上述车辆控制方法的步骤。
38、通过以上方案可知,本技术提供的一种车辆控制方法,包括:构建基于前轮转角的车辆横向偏差状态方程需要的参数矩阵,对所述参数矩阵进行离散化处理;基于离散的参数矩阵、前轮转角变化量和车辆状态变量、前轮转角的车辆横向偏差状态方程得到基于前轮转角变化量的车辆横向偏差状态方程;其中,所述车辆状态变量包括横向偏差、横向偏差变化率、航向角偏差、航向角偏差变化率和上一时刻的前轮转角;基于所述前轮转角变化量、所述车辆状态变量、所述前轮转角变化量和所述车辆状态变量分别对应的权重构建目标函数,利用所述基于前轮转角变化量的车辆横向偏差状态方程确定所述目标函数最小值时的目标前轮转角变化量;根据所述目标前轮转角变化量和当前的前轮转角确认目标前轮转角,基于所述目标前轮转角、转向速比确定目标方向盘角度,并基于所述目标方向盘角度进行车辆控制。
39、本技术提供的车辆控制方法,构建基于前轮转角变化量的车辆横向偏差状态方程,基于前轮转角变化量、车辆状态变量、前轮转角变化量和车辆状态变量分别对应的权重构建目标函数,利用基于前轮转角变化量的车辆横向偏差状态方程确定在目标函数取最小值时的目标前轮转角变化量,在目标函数取最小值时可以使得横向偏差、航向角偏差、前轮转角变化量也即方向盘摆动这三个性能指标尽量小,提高了车辆横向控制效果。本技术还公开了一种车辆控制装置及一种电子设备和一种计算机可读存储介质,同样能实现上述技术效果。
40、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!