一种后向碰撞预警方法及系统与流程
本公开涉及纯电动汽车智能驾驶系统,具体涉及一种后向碰撞预警方法及系统。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术信息,不必然构成在先技术。
2、乘用车后向碰撞预警功能通常通过车辆后向角雷达或者后向摄像头,实时监测本车后方的目标,当存在碰撞风险时,分别向本车驾驶员和后方车辆驾驶员发出报警信息,以提醒后方驾驶员快速做出躲避反应,可有效避免被追尾事故。
3、目前乘用车市场对该功能的搭载率较低,且普遍存在报警时机较迟,后方驾驶员没有充分的时间进行躲避。现有的技术方案中未增加相对车速的抑制,仅通过控制rttc的大小决定报警时机,经对市面现有车型测试,后碰预警时刻的rttc大多在0.8s以内,导致后方驾驶员没有充分的时间进行躲避,失去预警的意义。
技术实现思路
1、本公开为了解决上述问题,提出了一种后向碰撞预警方法及系统,精确后向碰撞预警功能的预警时机,提高对后方驾驶员的有效提醒和反应时间,提高驾驶的安全性能。
2、根据一些实施例,本公开采用如下技术方案:
3、一种后向碰撞预警方法,包括:
4、确定车辆后向碰撞预警区域,实时检测车辆后向碰撞预警区域目标物;
5、获取预警区域内出现的目标物移动速度以及相对于本车的速度,根据出现的目标物移动速度、相对于本车的速度判断预碰撞时间;
6、根据判断的预碰撞时间分别向车内驾驶员以及车外目标车辆的驾驶员发出预警;
7、其中,预警时间于本车速度和本车与目标车的相对速度关联,当本车与目标车辆的相对车速达到预设范围、且后向预碰撞预警时间符合预设的预警时间范围以及符合rttc与本车辆车速关系图时,发出预警。
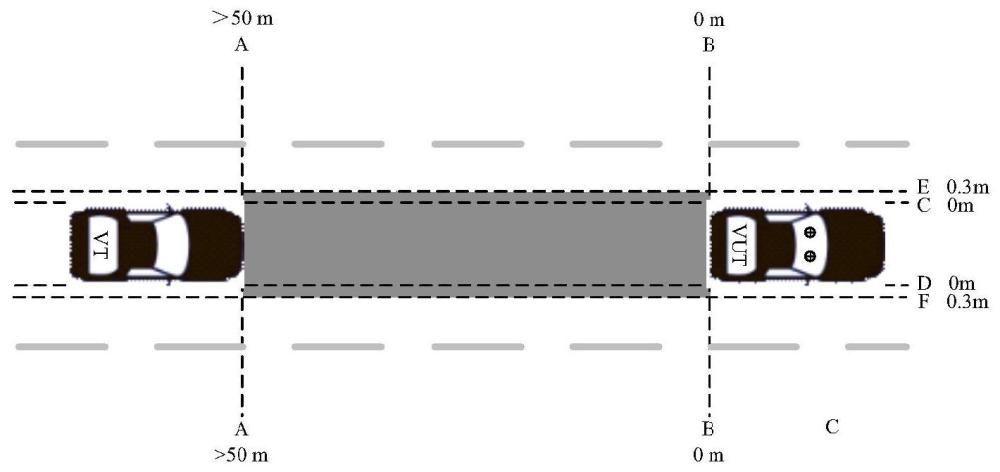
8、进一步的,后向碰撞预警区域位于本车辆正后方,为矩形区域,设定宽度范围在车辆宽度+0.3m之内,长度在50m之内。
9、进一步的,预警时间与本车速度和本车与目标车的相对速度关联,当本车与目标车辆的相对车速达到在30km/h~40km/h之内、且后向预碰撞预警时间符合预设的预警时间范围以及符合本车与目标车辆车速关系图时,发出预警。
10、进一步的,所述矩形区域由曲线a、b、e、f围成,曲线a平行于本车辆后缘,距离本车车辆后缘≥50m范围,曲线b为本车辆后缘的双向延长线,曲线c平行于本车辆的纵向中心,位于本车辆车身左侧最外缘。
11、进一步的,,曲线d平行于本车辆的纵向中心线,位于本车辆车身右侧最外缘;曲线e平行于本车辆的纵向中心线,位于本车辆车身左侧最外缘的左侧,与左侧最外缘相距≤0.3m;曲线f平行于本车辆的纵向中心线,位于本车辆车身右侧最外缘的右侧,与右侧最外缘相距≤0.3m。
12、进一步的,当后向预碰撞预警时间符合预设的2.0s~2.7s区间范围以及符合本车与目标车辆车速关系图时,发出预警。
13、进一步的,预警方式包括视觉预警和听觉预警,针对本车辆,视觉报警方式为仪表内弹框显示警示文字,仪表界面中,后车颜色为红色闪烁;听觉报警方式为车内语音播报以及高频报警声音。
14、进一步的,针对后侧的目标车辆,视觉报警方式为前车车辆尾灯爆闪,听觉报警方式为前车语音播报以及鸣笛声。
15、根据一些实施例,本公开采用如下技术方案:
16、一种后向碰撞预警系统,包括:
17、目标监测模块,用于确定车辆后向碰撞预警区域,实时检测车辆后向碰撞预警区域目标物;获取预警区域内出现的目标物移动速度以及相对于本车的速度;根据出现的目标物移动速度、相对于本车的速度判断预碰撞时间;
18、控制单元模块,用于根据出现的目标物移动速度、相对于本车的速度判断预碰撞时间;
19、预警模块,用于根据判断的预碰撞时间分别向车内驾驶员以及车外目标车辆的驾驶员发出预警;
20、其中,预警时间于本车速度和本车与目标车的相对速度关联,当本车与目标车辆的相对车速达到预设范围、且后向预碰撞预警时间符合预设的预警时间范围以及符合rttc与本车辆车速关系图时,发出预警。
21、根据一些实施例,本公开采用如下技术方案:
22、一种电子设备,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现所述的一种后向碰撞预警方法。
23、与现有技术相比,本公开的有益效果为:
24、本公开提供了一种后向碰撞预警方法及系统,通过车载毫米波雷达或摄像头实时监测车辆后向碰撞预警区域,并对预警区域内出现的目标物速度、相对于本车的速度,以及预碰撞时间进行判断,当预警时机符合设计要求时,分别向车内驾驶员和车外驾驶员发出视觉和(或)听觉预警。本公开规范后向碰撞预警功能的预警时机,提高对后方驾驶员的有效提醒和反应时间,提高了驾驶员的安全驾驶性能。
技术特征:
1.一种后向碰撞预警方法,其特征在于,包括:
2.如权利要求1所述的一种后向碰撞预警方法,其特征在于,后向碰撞预警区域位于本车辆正后方,为矩形区域,设定宽度范围在车辆宽度+0.3m之内,长度在50m之内。
3.如权利要求1所述的一种后向碰撞预警方法,其特征在于,预警时间与本车速度和本车与目标车的相对速度关联,当本车与目标车辆的相对车速达到在30km/h~40km/h之内、且后向预碰撞预警时间符合预设的预警时间范围以及符合本车与目标车辆车速关系图时,发出预警。
4.如权利要求2所述的一种后向碰撞预警方法,其特征在于,所述矩形区域由曲线a、b、e、f围成,曲线a平行于本车辆后缘,距离本车车辆后缘≥50m范围,曲线b为本车辆后缘的双向延长线,曲线c平行于本车辆的纵向中心,位于本车辆车身左侧最外缘。
5.如权利要求4所述的一种后向碰撞预警方法,其特征在于,曲线d平行于本车辆的纵向中心线,位于本车辆车身右侧最外缘;曲线e平行于本车辆的纵向中心线,位于本车辆车身左侧最外缘的左侧,与左侧最外缘相距≤0.3m;曲线f平行于本车辆的纵向中心线,位于本车辆车身右侧最外缘的右侧,与右侧最外缘相距≤0.3m。
6.如权利要求2所述的一种后向碰撞预警方法,其特征在于,当后向预碰撞预警时间符合预设的2.0s~2.7s区间范围以及符合本车与目标车辆车速关系图时,发出预警。
7.如权利要求1所述的一种后向碰撞预警方法,其特征在于,预警方式包括视觉预警和听觉预警,针对本车辆,视觉报警方式为仪表内弹框显示警示文字,仪表界面中,后车颜色为红色闪烁;听觉报警方式为车内语音播报以及高频报警声音。
8.如权利要求7所述的一种后向碰撞预警方法,其特征在于,针对后侧的目标车辆,视觉报警方式为前车车辆尾灯爆闪,听觉报警方式为前车语音播报以及鸣笛声。
9.一种后向碰撞预警系统,其特征在于,包括:
10.一种电子设备,其特征在于,包括:处理器、存储器以及计算机程序;其中,处理器与存储器连接,计算机程序被存储在存储器中,当电子设备运行时,所述处理器执行所述存储器存储的计算机程序,以使电子设备执行实现如权利要求1-8任一项所述的一种后向碰撞预警方法。
技术总结
本公开提供了一种后向碰撞预警方法及系统,涉及纯电动汽车智能驾驶系统技术领域,方法包括确定车辆后向碰撞预警区域,实时检测车辆后向碰撞预警区域目标物;获取预警区域内出现的目标物移动速度以及相对于本车的速度,根据出现的目标物移动速度、相对于本车的速度判断预碰撞时间;根据判断的预碰撞时间分别向车内驾驶员以及车外目标车辆的驾驶员发出预警;其中,预警时间于本车速度和本车与目标车的相对速度关联,当本车与目标车辆的相对车速达到预设范围、且后向预碰撞预警时间符合预设的预警时间范围以及符合本车与目标车辆车速关系图时,发出预警。本公开提高对后方驾驶员的有效提醒和反应时间。
技术研发人员:杨玉梅,陶绍保,吴洪涛,汤徳如,刘金水,贾国庆,曹安宁
受保护的技术使用者:奇瑞新能源汽车股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!