车辆控制方法及装置、车辆控制系统与流程
本技术涉及无人驾驶、无人车领域,具体涉及一种车辆控制方法及装置、车辆控制系统。
背景技术:
1、在矿山自动驾驶中,一般是多车编组进行运行,然而,在有限的空间内,车辆之间可能会存在阻挡而无法行进,严重影响效率。针对该问题,目前常用的解决方式是,将车辆的轨迹、位置、任务等状态信息上传到云端,由云端进行调度处理。
2、然而,由于需要将数据上传到云端,由云端处理并将让行指令下发到车辆来执行,因此,延迟性较高,进而导致车辆的周转时间延长、增加事故风险。此外,云端对网络的依赖较大,如果网络不稳定或者出现故障,就会导致车辆无法及时得到调度指令,进而影响车辆的运行效率和安全性。
技术实现思路
1、有鉴于此,本技术实施例提供了一种车辆控制方法及装置、车辆控制系统。
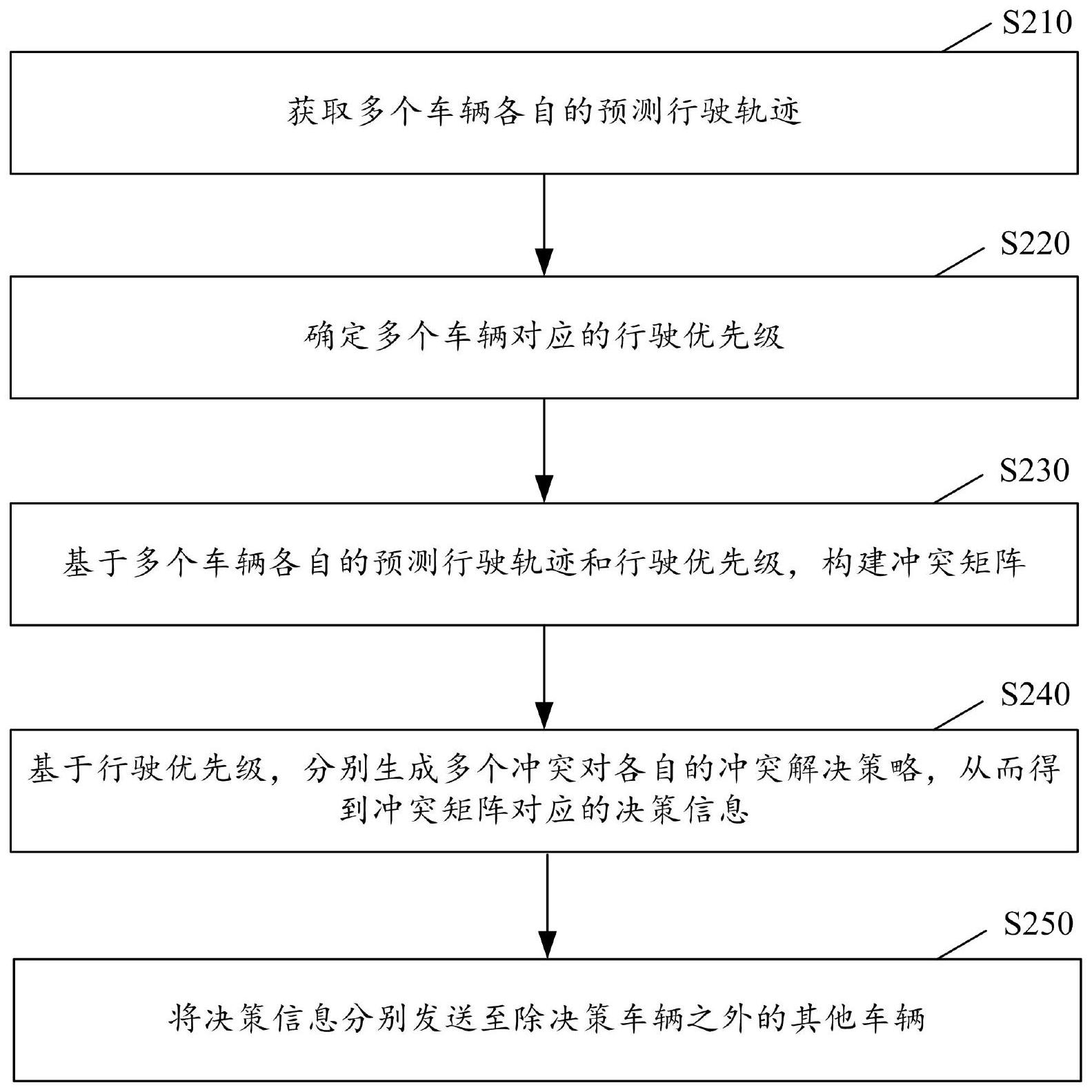
2、第一方面,本技术一实施例提供了一种车辆控制方法,应用于目标区域中的决策车辆,目标区域中包括多个车辆,决策车辆为多个车辆之一。该方法包括:获取多个车辆各自的预测行驶轨迹;确定多个车辆对应的行驶优先级;基于多个车辆各自的预测行驶轨迹和行驶优先级,构建冲突矩阵,冲突矩阵中包括多个冲突对,每个冲突对表征一个轨迹交叉点、以及形成轨迹交叉点的车辆的通行决策,其中,形成轨迹交叉点的车辆的通行决策是基于行驶优先级确定的;基于行驶优先级,分别生成多个冲突对各自的冲突解决策略,从而得到冲突矩阵对应的决策信息;将决策信息分别发送至除决策车辆之外的其他车辆,以便多个车辆分别基于决策信息执行各自对应的行驶策略。
3、结合第一方面,在第一方面的某些实现方式中,基于行驶优先级,分别生成多个冲突对各自的冲突解决策略,从而得到冲突矩阵对应的决策信息,包括:依照行驶优先级从高到低的顺序,基于目标执行策略依次决策每个车辆对应的目标冲突对,生成目标冲突对的冲突解决策略,从而得到冲突矩阵对应的决策信息。其中,每个车辆对应的目标冲突对为该车辆参与的所有冲突对中与该车辆冲突的其他车辆的行驶优先级最高的冲突对。其中,目标执行策略包括:每个冲突对均不被重复决策;每个冲突对的冲突解决策略用于生成待决策的下一冲突对的冲突解决策略。
4、结合第一方面,在第一方面的某些实现方式中,决策信息中包括各个车辆到达轨迹交叉点的预估时间。其中,多个车辆分别基于决策信息执行各自对应的行驶策略,包括:针对每个车辆,确定当前时间和该车辆到达轨迹交叉点的预估时间之间的时间差值,在时间差值小于或等于时间阈值的情况下,执行该车辆的行驶策略。
5、结合第一方面,在第一方面的某些实现方式中,多个车辆之间利用v2v通信方式通信连接。其中,将决策信息分别发送至除决策车辆之外的其他车辆,包括:利用v2v通信方式,将决策信息分别发送至除决策车辆之外的其他车辆。
6、结合第一方面,在第一方面的某些实现方式中,该方法还包括:向指定范围内的其他车辆发送自身位置信息,并接收指定范围内的其他车辆各自发送的自身位置信息,以便在基于各个车辆的自身位置信息确定位于指定范围内的第一区域的车辆的数量大于数量阈值,并且位于指定范围内的第一区域的车辆的预测行驶轨迹存在交叉的情况下,将第一区域确定为目标区域;或者,基于v2x通信方式,获取位于指定范围内的第二区域的车辆的数量,以便在位于指定范围内的第二区域的车辆的数量大于数量阈值,并且位于指定范围内的第二区域的车辆的预测行驶轨迹存在交叉的情况下,将第二区域确定为目标区域。
7、结合第一方面,在第一方面的某些实现方式中,决策车辆基于下述各项中的任一项确定:产生车辆冲突后,基于发起广播的时间,从多个车辆中确定决策车辆;优选地,将最早发起广播的车辆确定为决策车辆,其中,优选地,若最早发起广播的车辆为多个,则基于多个最早发起广播的车辆各自的车号确定决策车辆;将轨迹交叉点最多的车辆确定为决策车辆;将行驶优先级最低的车辆确定为决策车辆;将距离目标位置点最近的车辆确定为决策车辆。
8、结合第一方面,在第一方面的某些实现方式中,确定多个车辆对应的行驶优先级,包括:针对每个车辆,确定该车辆的优先级影响因素和优先级影响因素对应的权重,并基于优先级影响因素和优先级影响因素对应的权重,确定该车辆的优先级计算结果;基于多个车辆各自的优先级计算结果,确定多个车辆对应的行驶优先级。其中,优先级影响因素包括下述各项中的至少一项:到达轨迹交叉点的时间因素,优选地,到达时间越短权重越大;任务类型因素,优选地,卸载任务的权重大于装载任务的权重;与行驶终点的距离因素,优选地,越接近终点权重越大;载重因素,优选地,载重越多权重越大;停车时间因素,优选地,停车时间越长权重越大;车辆行驶方向因素,优选地,离开目标区域的车辆的权重大于进入目标区域的车辆的权重;与出口的距离因素,优选地,距离越小权重越大。
9、第二方面,本技术一实施例提供了一种车辆控制系统,该系统包括多个车辆,多个车辆包括决策车辆和其他车辆。其中:该决策车辆被配置为:获取多个车辆各自的预测行驶轨迹;确定多个车辆对应的行驶优先级;基于多个车辆各自的预测行驶轨迹和行驶优先级,构建冲突矩阵,冲突矩阵中包括多个冲突对,每个冲突对表征一个轨迹交叉点、以及形成轨迹交叉点的车辆的通行决策,其中,形成轨迹交叉点的车辆的通行决策是基于行驶优先级确定的;基于行驶优先级,分别生成多个冲突对各自的冲突解决策略,从而得到冲突矩阵对应的决策信息;将决策信息分别发送至除决策车辆之外的其他车辆,以便多个车辆分别基于决策信息执行各自对应的行驶策略;每个其他车辆被配置为:接收决策车辆发送的决策信息;基于决策信息执行该车辆对应的行驶策略。
10、第三方面,本技术一实施例提供了一种车辆控制装置,应用于目标区域中的决策车辆,目标区域中包括多个车辆,决策车辆为多个车辆之一。其中,该装置包括:预测模块,用于获取多个车辆各自的预测行驶轨迹;确定模块,用于确定多个车辆对应的行驶优先级;构建模块,用于基于多个车辆各自的预测行驶轨迹和行驶优先级,构建冲突矩阵,冲突矩阵中包括多个冲突对,每个冲突对表征一个轨迹交叉点、以及形成轨迹交叉点的车辆的通行决策,其中,形成轨迹交叉点的车辆的通行决策是基于行驶优先级确定的;决策模块,用于基于行驶优先级,分别生成多个冲突对各自的冲突解决策略,得到冲突矩阵对应的决策信息;发送模块,用于将决策信息分别发送至除决策车辆之外的其他车辆,以便多个车辆分别基于决策信息执行各自对应的行驶策略。
11、第四方面,本技术一实施例提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序用于执行第一方面所述的方法。
12、第五方面,本技术一实施例提供了一种电子设备,该电子设备包括:处理器;用于存储处理器可执行指令的存储器;该处理器用于执行第一方面所述的方法。
13、首先,本技术是利用决策车辆来确定冲突矩阵的决策信息,避免了云端对多车进行调度而造成的对网络的高度依赖,以及云端调度的延迟和网络拥堵的影响,提高了车辆的通行效率,以及车辆间的协调和配合能力,保证了车辆运行的安全性。其次,通过多个车辆对应的行驶优先级,确定冲突对中的车辆的通行决策,能够有效地降低通行阻塞的情况,降低交通事故发生的风险,提高行车的安全性。构建完冲突矩阵后,进一步根据行驶优先级,生成冲突对的冲突解决策略,以得到冲突矩阵对应的决策信息,这个过程中考虑到了前一冲突对在冲突解决后,对后一冲突对的冲决解决策略的影响,保证了最终确定的冲突对的冲突解决策略的准确性,使得多个车辆之间的行驶更加安全。
- 还没有人留言评论。精彩留言会获得点赞!