一种电动剪叉车双轮驱动的电子差速控制方法及系统与流程
本发明涉及工业过程控制,尤其涉及一种电动剪叉车双轮驱动的电子差速控制方法及系统。
背景技术:
1、电动剪叉车是用途广泛的高空作业设备,两个驱动轮通过减速机分别安装在剪叉车的前端或后端轮上,相应的使剪叉车成为前轮驱动或后轮驱动电动剪叉车。在转弯时,根据转弯角度不同,车辆外侧车轮的转弯半径高于内测车轮的转弯半径,如电机控制器无差速控制算法对驱动电机进行差速控制,仅靠车辆自身摩擦力,会造成车轮滑移,轮胎磨损加剧和道路附着力变小以及无用功率大从而降低电池续航里程。
2、目前,电子差速在电动汽车领域应用技术比较成熟,申请号为201210509208.7的专利公开的一种电动轮车辆的电子差速控制方法是通过转向轮转角传感器测量转角大小然后根据转向角度分配控制左右轮输出转矩来实现差速控制,但不能适应打滑工况和无转角传感器车辆控制;申请号为201910317475.6的专利公开的一种双轮独立驱动车辆电子差速控制方法根据左右驱动轮转速比与根据汽车方向盘转角计算出转弯半径之比来实时改变左右轮毂的转矩分配系数来实现差速控制,不能适应无转角传感器的车辆差速控制。
3、但是上述的车辆电子差速控制需要电机控制器获取车辆转向角度,然后从新分配两轮转矩,在转弯时速度较快,一般对整车滑转率和横摆稳定性有过高的要求,控制方法过于复杂,并不适用于电动剪叉车这种行驶和转弯速度较低,以及一般无车辆转向角度传感器的工程车辆控制。
技术实现思路
1、本发明所要解决的技术问题是:提供一种电动剪叉车双轮驱动的电子差速控制方法及系统,有效解决背景技术中的问题。
2、为了达到上述目的,本发明所采用的技术方案是:一种电动剪叉车双轮驱动的电子差速控制方法,包括以下步骤:
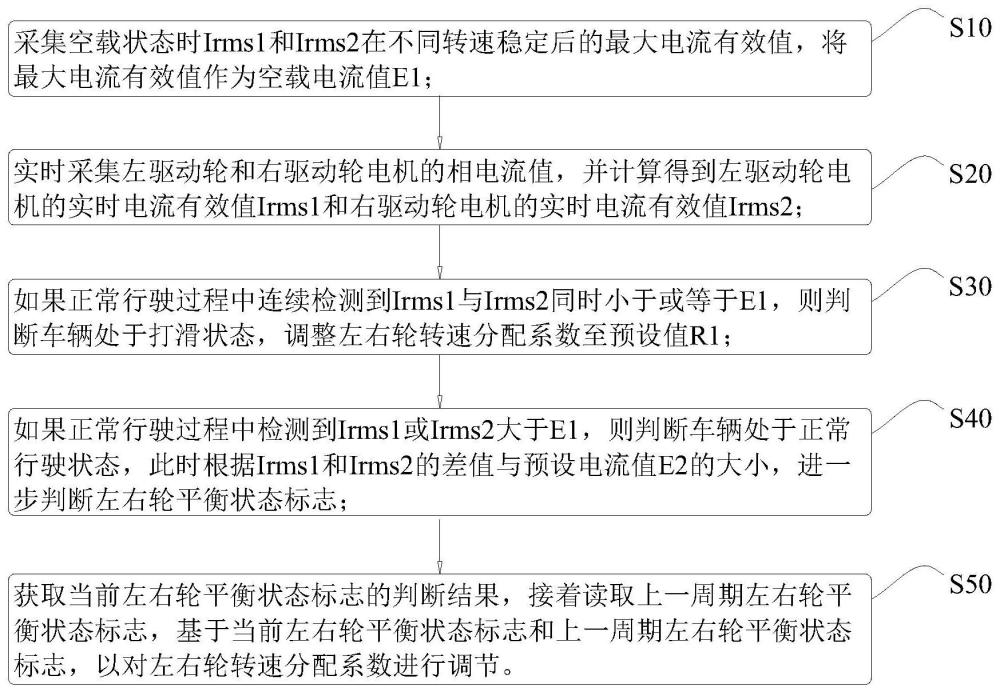
3、s10、采集空载状态时irms1和irms2在不同转速稳定后的最大电流有效值,将最大电流有效值作为空载电流值e1;
4、s20、实时采集左驱动轮和右驱动轮电机的相电流值,并计算得到左驱动轮电机的实时电流有效值irms1和右驱动轮电机的实时电流有效值irms2;
5、s30、如果正常行驶过程中连续检测到irms1与irms2同时小于或等于e1,则判断车辆处于打滑状态,调整左右轮转速分配系数至预设值r1;
6、s40、如果正常行驶过程中检测到irms1或irms2大于e1,则判断车辆处于正常行驶状态,此时根据irms1与irms2的差值与预设电流值e2的大小,进一步判断左右轮平衡状态标志;
7、s50、获取当前左右轮平衡状态标志的判断结果,接着读取上一周期左右轮平衡状态标志,基于当前左右轮平衡状态标志和上一周期左右轮平衡状态标志,以对左右轮转速分配系数进行调节。
8、进一步地,所述预设值r1的取值范围为0.1~0.3。
9、进一步地,所述预设电流值e2为车辆在平稳路段直行状态下的左右轮电流差值稳定值。
10、进一步地,在步骤s40中,所述左右轮平衡状态标志的判断步骤具体为:
11、s401、若irms1与irms2差值的绝对值小于或等于e2时,则左右轮平衡状态标志为f1,否则进入步骤s402;
12、s402、若irms1与irms2差值大于e2时,则左右轮平衡状态标志为f2,否则进入步骤s403;
13、s403、当irms1与irms2差值小于-e2时,则左右轮平衡状态标志为f3。
14、进一步地,在步骤s50中,当左右轮平衡状态标志当前为f1时,进一步对上一周期左右轮平衡状态进行判断,并对左右轮转速分配系数进行调节,具体步骤为:
15、读取上一周期左右轮平衡状态标志;
16、判断左右轮平衡状态标志是否为f1;
17、如果左右轮平衡状态标志为f1,则将左右轮电机转速分配系数同时设为1,并结束当前判断流程;
18、如果左右轮平衡状态标志不为f1,则判断左右轮平衡状态标志是否为f2;
19、如果左右轮平衡状态标志为f2,则将右轮电机转速配系数设为1,左轮电机转速配系数逐渐增加到1,并结束当前判断流程;
20、否则左右轮平衡状态标志为f3,则将左轮电机转速配系数设为1,将右轮电机转速配系数逐渐增加到1,并结束当前判断流程。
21、进一步地,在步骤s50中,当左右轮平衡状态标志当前为f2时,进一步对上一周期左右轮平衡状态进行判断,并对左右轮转速分配系数进行调节,具体步骤为:
22、读取上一周期左右轮平衡状态标志;
23、判断左右轮平衡状态标志是否为f1或f2;
24、如果左右轮平衡状态标志是f1或f2,则将右轮电机转速分配系数设为1,左轮电机转速分配系数逐渐降低,并结束当前判断流程;
25、否则左右轮平衡状态标志是f3,则将左轮电机转速分配系数逐渐降低,右轮电机转速配系数逐渐增加,并结束当前判断流程。
26、进一步地,在步骤s50中,当左右轮平衡状态标志当前为f3时,进一步对上一周期左右轮平衡状态进行判断,并对左右轮转速分配系数进行调节,具体步骤为:
27、读取上一周期左右轮平衡状态标志;
28、判断左右轮平衡状态标志是否为f1或f3;
29、如果左右轮平衡状态标志是f1或f3,则将左轮电机转速分配系数设为1,右轮电机转速分配系数逐渐降低,并结束当前判断流程;
30、否则左右轮平衡状态标志是f2,则将右轮电机转速分配系数逐渐降低,左轮电机转速配系数逐渐增加,并结束当前判断流程。
31、本发明还提供了一种电动工程剪叉车双轮驱动的电子差速控制系统,包括:
32、第一采集模块,用于采集空载状态时irms1和irms2在不同转速稳定后的最大电流有效值,并将最大电流有效值作为空载电流值e1;
33、第二采集模块,用于电机控制器实时采集左驱动轮和右驱动轮电机的相电流值,分别计算得到左驱动轮电机的实时电流有效值irms1和右驱动轮电机的实时电流有效值irms2;
34、第一判断模块,如果正常行驶过程中连续检测到irms1与irms2同时小于等于e1,则判断车辆处于打滑状态,调整左右轮转速分配系数至预设值r1;
35、第二判断模块,如果正常行驶过程中检测到irms1或irms2大于e1,则判断车辆处于正常行驶状态,此时根据irms1与irms2的差值与预设电流值e2的大小,进一步判断左右轮平衡状态标志;
36、调节执行模块,获取当前左右轮平衡状态标志的判断结果,读取上一周期左右轮平衡状态标志,基于当前左右轮平衡状态标志和上一周期左右轮平衡状态标志,以对左右轮转速分配系数进行调节。
37、本发明还提供了一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的电子差速控制方法。
38、本发明还提供了一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上所述的电子差速控制方法。
39、本发明的有益效果为:本发明中电机控制器对电机驱动差速控制,实现转弯时双轮转矩平衡,避免车轮滑移,减小无用功率,进而增加轮胎使用寿命和电池续航里程,并通过差速控制算法,能够在检测到两驱动轮打滑时自动降低转速,提高了转矩,增大与地面的附着力,有效降低工程电动剪叉车打滑工况的发生。
- 还没有人留言评论。精彩留言会获得点赞!