一种基于侧边超声波雷达的车位搜索方法、模块、车辆
本发明属于自动驾驶领域,具体涉及一种基于侧边超声波雷达的车位搜索方法、模块以及对应的自动泊车方法和车辆。
背景技术:
1、随着技术的不断发展,汽车自动驾驶技术已经成为汽车工业的一个重要发展方向,目前自动驾驶技术日趋成熟,大规模的商业化应用即将拉开序幕。典型的自动驾驶系统中的一些应用,诸如全自动泊车apa、自动紧急制动系统aeb等辅助驾驶技术已经商业化推广应用,并成为智能汽车吸引客户的重要技术卖点。
2、实现自动泊车的前提是需要对车辆周围的环境进行障碍物识别,这需要利用车辆周围布置的雷达或视觉传感器等。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响,受环境影响小,稳定性好;探测范围在0.2-5.0米之间,而且精度较高,实时性好。基于超声波雷达的障碍物识别方法具有成本相对较低,探测精度较高、实时性好的优势,但是其也存在一些弊端。例如,当前基于超声波雷达的自动泊车系统在搜索车位时往往只关心空间车位两侧的障碍物角点,并认为车位侧边参考障碍物均为简单的矩形形状,由此计算空间车位角点位置和泊车时的规划路线。而实际生活中,车位两旁的障碍物往往是多个矩形组成的复合障碍物,且提供给泊车的空间也不是简单的横平竖直。这可能会导致车辆误识别,并释放一些可能会对其他车辆正常通行造成干扰的错误车位。
3、另外,超声波雷达的探测范围是一个扇形区域,因此在进行障碍物探测时会导致识别出的障碍物过宽,这可能会导致无法识别出较窄的车位,也会缩小安全区域的实际范围,进而导致泊车路径规划失败。因此,如何对超声波雷达的探测信号进行进一步的挖掘,实现对组合障碍物的类型进行划分,精准识别障碍物的真实轮廓信息,准确划分障碍物空间和可泊车空间,是自动泊车系统感知模块需要研究的课题之一。
技术实现思路
1、为了解决现有基于超声波雷达的障碍物识别技术存在无法准确分辨障碍物类型以及车辆搜索结果不准确的问题,本发明提供一种基于侧边超声波雷达的车位搜索方法、模块以及对应的自动泊车方法和车辆。
2、本发明采用以下技术方案实现:
3、一种基于侧边超声波雷达的车位搜索方法,其利用车辆侧边的超声波雷达的探测数据对障碍物的位置进行精准定位,进而实现对空闲车位进行识别。本发明提供的车位搜索方法包括如下步骤:
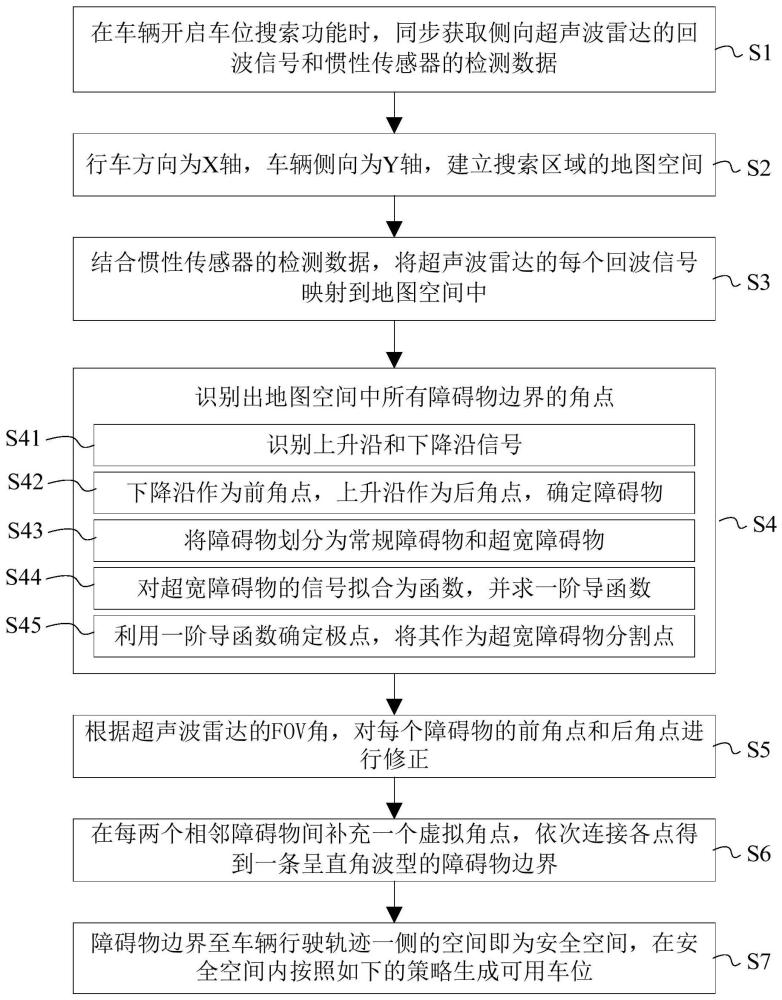
4、s1:在车辆开启车位搜索功能时,同步获取侧向超声波雷达的回波信号和惯性传感器的检测数据。回波信号的原始数据点格式为(t,yt)。
5、其中,t表示时刻;yt表示障碍物距车辆的侧向距离。
6、s2:以车辆行车方向为x轴方向,车辆侧向为y轴,建立搜索区域的地图空间xoy。
7、s3:结合惯性传感器的检测数据,将超声波雷达的每个回波信号对应的每个数据点(t,yt)映射到地图空间中,得到各个连续信号点ut:ut=(xt,yt)。
8、其中,xt表示车辆行驶距离,构成的信号点集u。
9、s4:根据信号点集u识别出地图空间中对应障碍物边界的角点,过程详细如下:
10、s41:根据相邻信号的yt值识别出信号点集u中的各个上升沿信号和下降沿信号。
11、s42:将上升沿信号对应的信号点标记为标记前角点bj,下降沿信号对应的信号点标记为后角点cj;每组前角点至后角点之间区域标记为一个障碍物bj。
12、其中,下标j表示角点或障碍物的编号。
13、s43:根据障碍物的宽度将信号点集u中探测到的各个障碍物分为常规障碍物和超宽障碍物。
14、s44:对超宽障碍物对应的所有信号点进行拟合,得到拟合曲线s(t),并计算拟合曲线的一阶导函数s(t)'。
15、s45:设置一个阈值k,当邻域内满足:|s(ti)'-s(ti-1)'|>k时,则认为该处存在一个障碍物边界;其中,i表示信号点集u中的信号点的序号,i=2,3,4…n。
16、在每个边界处将原超宽障碍物一分为二,生成一个对应的后角点和前角点,并对后续角点和障碍物进行重新编号。
17、s5:根据超声波雷达的fov角,对每个障碍物bj对应前角点bj和后角点cj进行修正,得到精确前角点bj′和精确后角点c′j。
18、s6:在每两个相邻障碍物间补充一个虚拟角点dj,依次连接各个精确前角点bj′、精确后角点cj′和虚拟角点dj,得到一条呈直角波型的障碍物边界。
19、s7:障碍物边界至车辆行驶轨迹一侧的空间即为安全空间,在安全空间内按照如下的策略生成可用车位:
20、(1)当任意两障碍物的间隙宽度大于标准车位长度时,在对应位置根据前后车位类型生成一个可用纵向车位或横向车位。
21、(2)当任意两障碍物的间隙宽度大于标准车位宽度且小于标准车位长度,并且满足前后车辆均纵向车位时,生成一个可用的纵向车位。
22、(3)当任意两车间隙不足以生成车位时,继续判断是否存在一个超宽障碍物同时满足:
23、a.超宽障碍物宽度大于标准车位长度,
24、b.超宽障碍物距当前车辆的最小距离大于标准车位宽度;
25、是则在对应位置生成一个可用横向车位;
26、否则判断行驶路径上无可用车位。
27、作为本发明进一步的改进,步骤s1中,惯性传感器用于检测车辆行驶过程的速度、加速度和转角信号,数据格式如下(vt,at,βt)。步骤s3中,车辆的行驶距离xt的计算公式如下:
28、
29、作为本发明进一步的改进,步骤s41中,上升沿信号和下降沿信号的判断方法如下:
30、对于任意两个相邻信号点ut和ut+1,定义超声波雷达探测范围内无障碍物时yt=0,则:
31、(1)当满足:yt>0,且yt+1=0时,定义ut为下降沿信号;
32、(2)当满足:yt=0,且yt+1>0时,定义ut为上升沿信号。
33、作为本发明进一步的改进,步骤s3中,常规障碍物和超宽障碍物的划分方法如下:
34、(1)预设标准车位宽度为w0;
35、(2)通过下式计算信号点集u中每个障碍物的宽度wj:
36、wj=xj,2-xj,1
37、上式中,xj,1表示第j个障碍物bj的前角点bj的横坐标;xj,2表示第j个障碍物bj的后角点cj的横坐标。
38、(3)当任意障碍物bj的宽度wj满足:wj≥2w0时,则定义其为超宽障碍物,否则为常规障碍物。
39、作为本发明进一步的改进,步骤s44中,采用最小二乘法或b样条曲线拟合方法对离散的信号点进行拟合,得到对应的拟合曲线。
40、作为本发明进一步的改进,步骤s5中,精确前角点bj′和精确后角点c′j的更新过程如下:
41、s51:对于任意障碍物bj,其对应的前角点bj和后角点cj的坐标记为(xj,1,yj,1)和(xj,2,yj,2)。
42、s52:取前后角点间与超声波雷达的距离的最小值为风险最高距离y1min。
43、s53:当超声波雷达的fov角为θ时,则通过下式计算精确前角点bj′和精确后角点cj′的横坐标xj,1'和xj,2':
44、
45、s54:则修正后的精确前角点bj′和精确后角点c′j的坐标为(xj,1',y1m)和(xj,2',y1m)。
46、作为本发明进一步的改进,步骤s6中,虚拟角点dj的生成方法如下:
47、(1)对于任意两个相邻障碍物bj和bj+1,获取bj的精确前角点和精确后角点的坐标,记为:(xj,1,y2min)和(xj,2,y2min),获取bj+1的精确前角点和精确后角点的坐标,记为:(xj+1,1,y3min)和(xj+1,2,y3min)。
48、其中,y2min为障碍物bj的回波距离最小值,y3min为障碍物bj+1的回波距离最小值。
49、(2)以障碍物边界处的两个角点中回波距离最小值中较大的一个角点横坐标作为虚拟角点的横坐标,即:
50、当y2min>y3min,则虚拟角点的横坐标为xj,2;
51、当y3min>y2min,则虚拟角点dj的坐标为xj+1,1。
52、(3)以相邻两障碍物间回波距离最小值中较小的一个作为虚拟角点的纵坐标,即:
53、当y2min>y3min,则虚拟角点dj的坐标为y2min;
54、当y3min>y2min,则虚拟角点dj的坐标为y3min。
55、本发明还包括一种基于侧边超声波雷达的车位搜索模块,其包括存储器、处理器以及存储在存储器上并在处理器上运行的计算机程序。处理器执行计算机程序时,实现如前述的基于侧边超声波雷达的车位搜索方法的步骤,识别出目标区域中的空闲车位。
56、本发明还包括一种自动泊车方法,其包括如下步骤:
57、(1)先采用如前述的基于侧边超声波雷达的车位搜索方法获取候选停车位。
58、(2)再通过任意一种路径规划算法在安全空间内生成一条从当前位置到达候选停车位且满足无碰撞约束的停车路径。
59、(3)最后驱动车辆按照规划出的停车路径行驶到候选停车位内。
60、本发明还包括一种车辆,车辆的控制系统内集成有能够驱动车辆自动泊车的计算机程序,计算机程序执行时,实现如前述的自动泊车方法。
61、本发明提供的技术方案,具有如下有益效果:
62、发明提供的方法可以通过修正精确角点的方式克服传统超声波雷达对障碍物“过宽估计”导致的丢有效失车位的问题。同时本发明结合对超宽障碍物的分割,实现对障碍物类型的精准分类,进而克服了横向车位错误释放影响其他车辆正常通信的问题。
63、本发明在安全区域内生成车位时,遵循先寻找宽间隙的车位,后寻找窄间隙的车位,最后寻找无间隙的侧方车位的策略,因而可以最大化寻找到所有可用车位。
64、本发明提供的车位搜索方案可以仅仅依赖单个超声波雷达的检测信号,达到媲美机器视觉或人眼识别的效果。该方案相对现有其他基于超声波雷达的方案更加精细,更加准确,更加符合驾驶人员对实际状况的评估,因而可以大幅度提升侧边超声波雷达在自动泊车等辅助驾驶技术中的应用。
- 还没有人留言评论。精彩留言会获得点赞!