一种车速预测方法及其装置
本发明涉及一种车速预测方法及其装置,属于汽车能量管理策略。
背景技术:
1、车速预测对混合动力汽车能量管理具有重要意义,混合系统可以预测车速,合理分配各动力源的功率输出,以实现最佳的动力系统效率。例如,在加速工况时,系统可以选择使用燃料电池系统来提供平均动力,而瞬时需求功率可以通过电池组来提供。这种能量管理策略可以减少瞬载工况对燃料电池系统的损害,同时提高驾驶的舒适性。车速预测还可以帮助混合动力汽车优化能量回收系统。通过准确预测车速变化,系统可以更好地控制能量回收的时机和程度,最大限度地利用制动能量,从而提高能源利用效率。此外,车速预测可提前进行功率分配从而对燃料电池的滞后功率进行跟踪补偿控制,提高混合动力系统的动力性和经济性。提高车速预测精度对混合动力汽车能量管理策略的优化具有重要现实意义,可以提高混合动力系统的动力性、经济性和耐久性,并改善驾驶体验。
2、马尔科夫(markov)预测方法是一种常见的车速预测方法,具有数据需求量小、模型可解释性强及计算速度快等优势。公开号为cn113537620a的专利,公开了一种带有工况识别器的markov车速预测方法,首先建立基于标准工况的基础markov车速预测模型;然后分别在4种标准工况下求解自身的转移概率矩阵,得到4种工况对应的优化转移概率矩阵;最后,基于工况识别器的识别结果动态调整相应的优化转移概率矩阵进行车速预测。该发明能够根据工况在线识别的结果调用对应的markov车速预测模型,提高车速预测的精度,但是,其是基于标准的基础markov车速预测模型,标准工况下的验证结果无法完全反映实际工况下的情况,与真实工况有着一定的差异,因此难以在真实工况下实现精确的预测车速。
3、公开号为cn115565385a的专利,结合了标准工况数据、历史数据和实时数据,首先根据车辆的样本工况数据构建基于markov链的初始状态空间;然后根据实时工况数据对初始状态空间进行重构,得到重构状态空间;接着,基于邻近代替法在样本工况数据中的离散采样点的集合中确定与当前的实时工况数据的离散采样点距离最近的采样点,记为替代采样点,并根据替代采样点所处的状态替换当前的实时工况数据的状态,得到替换状态空间;随后,基于最大似然估计法,根据替换状态空间得到状态转移概率矩阵;最后,结合状态转移概率矩阵及与单尺度多步预测方法对预测时域内的车辆未来车速进行预测,得到未来车速状态,虽然在实时工况下实现了车速预测,但是并没有脱离工况的识别,实时工况存在许多随机因素,这些因素会降低工况识别的精度,而工况识别精度的下降又会导致概率转移矩阵的错误使用,从而降低预测的准确性。
技术实现思路
1、发明目的:针对现有技术中存在的不足,本发明提供了一种车速预测方法及其装置,本发明通过对不同约束条件下的马尔科夫车速预测模型进行预测,分析汽车行驶状态在线识别模型对马尔科夫车速预测模型的影响后,对其进行调整,得出最终的基于时间分类的马尔科夫车速预测模型进行车速预测。
2、技术方案:一种车速预测方法,包括以下步骤:
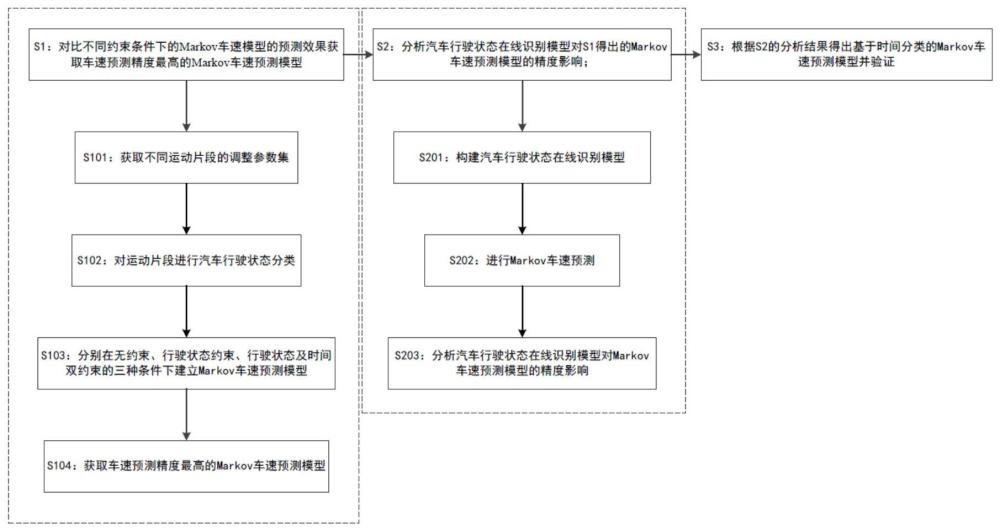
3、s1:对不同约束条件下的马尔科夫车速模型的预测效果进行对比,得出车速预测精度最高的马尔科夫车速预测模型;
4、s101:基于实时车速数据筛选运动片段的特征参数,并采用特征降维方法进行降维,得出不同运动片段的特征参数集;
5、s102:结合s101得到的特征参数集对运动片段进行汽车行驶状态分类;
6、s103:根据s102得出的运动片段所属的汽车行驶状态,分别在无约束、行驶状态约束、行驶状态及时间双约束的三种条件下建立马尔科夫车速预测模型;
7、s104:对在无约束、行驶状态约束、行驶状态及时间双约束的三种条件下的马尔科夫车速预测模型进行车速预测,得出车速预测精度最高的马尔科夫车速预测模型;
8、s2:分析汽车行驶状态在线识别模型对s1得出的马尔科夫车速预测模型的精度影响;
9、s201:构建汽车行驶状态在线识别模型;
10、s202:进行马尔科夫车速预测;
11、s203:分析汽车行驶状态在线识别模型对马尔科夫车速预测模型的精度影响;
12、s3:根据s2的分析结果对马尔科夫车速预测模型进行调整,并分析聚类中心个数对预测精度的影响,以得出最终的时间分类的马尔科夫车速预测模型并验证。
13、本发明通过对在无约束、行驶状态约束、行驶状态及时间双约束的三种条件下的马尔科夫车速预测模型进行车速预测,得出车速预测精度最高的马尔科夫车速预测模型,并分析汽车行驶状态在线识别模型对马尔科夫车速预测模型的精度影响,从而对马尔科夫车速预测模型进行调整,考虑了不同约束条件下的马尔科夫车速预测模型的预测精度,结合汽车行驶状态在线识别模型,即在线汽车行驶状态误差对车速预测精度的影响,调整马尔科夫车速预测模型,使其汽车行驶状态识别误差减小,变相提高车速预测精度。
14、优选项,所述s101中的基于实时车速数据筛选运动片段的特征参数的具体方法为,将连续两个车速为0的停车点之间的过程划分为一个相对独立的运动片段;
15、提取运动片段的速度相关特征参数,速度相关特征参数包括平均车速、平均行驶车速、速度方差、最大速度、最高车速与最低车速之差;
16、提取运动片段的加速度特征相关参数,加速度相关特征参数包括正加速度均值、负加速度均值、加速度方差、最大加速度、最大减速度;
17、提取运动片段的时间分布相关特征参数,时间分布相关特征参数包括加速时间比例、减速时间比例、匀速时间比例、怠速时间比例、加速时间、减速时间、匀速时间、怠速时间、运行时间;
18、提取运动片段的距离相关特征参数,距离相关特征参数包括行驶路程。
19、优选项,所述s101中所述的特征降维法具体为:
20、对特征参数进行相同尺度求解,并进行归一化处理:
21、
22、其中,x′是归一化后的特征参数,x是归一化前的特征参数,xmax与xmin分别为归一化前每一特征参数中的最大值与最小值;
23、利用主成分分析将上述特征参数转化为综合特征参数,降低特征参数间的相关性,实现对各运动片段的特征参数的降维;并根据主成分分析中的特征值和累计贡献率确定特征参数集。
24、优选项,所述s102的具体步骤为:
25、汽车行驶状态包括低速行驶状态、中速行驶状态、高速行驶状态;
26、利用k均值聚类法对特征参数集进行聚类分析,得到各个运动片段所属的汽车行驶状态,包括:
27、计算给定特征参数点到聚类中心之间的欧氏距离d:
28、
29、其中,d表示欧式距离,x为参数点,ci为第i个聚类中心,m为参数矩阵的维度,xj、cij分别为x和ci的第j个属性值;
30、基于聚类后的每个汽车行驶状态的特征参数均值,对运动片段进行汽车行驶状态分类。
31、优选项,所述s103的具体步骤为:
32、分别在无约束、行驶状态约束、行驶状态及时间双约束的三种条件下分别计算马尔科夫车速预测的转移概率矩阵来建立马尔科夫车速预测模型:
33、
34、其中,pmn表示表示第m个时间分类下第n个车速编号的加速度转移概率矩阵,pij表示在当前加速度状态i的情况下跳转到下一时刻加速度状态j的概率;
35、对加速度转移概率pij进行求解:
36、
37、其中,fij表示k时刻的加速度转移到k+1时刻的加速度的次数,fi表示从加速度转移的总次数;n为预测车速点的个数;
38、对fi进行求解,:
39、
40、其中,fi表示从加速度转移的总次数;
41、无约束条件下的转移概率矩阵求解是利用所有运行片段数据;汽车行驶状态约束条件下的转移概率矩阵求解是对各行驶状态下车速数据分别求解;汽车行驶状态及时间双约束约束条件下的转移概率矩阵求解是分别对不同行驶状态和时间分类的下的车速数据进行计算。
42、转移矩阵求解完后,根据当前所属的类别,动态调整相应的加速度转移概率pmn进行车速预测。
43、优选项,所述s104的具体步骤为:
44、对在无约束条件下的马尔科夫车速预测模型进行预测:
45、将当前k时刻车速vk、加速度ak作为马尔科夫车速预测模型的输入,用来预测接下来k+1时刻加速度发生的所有变化过程;从这些变化过程中,选取概率最大的一个作为实际的变化过程,进而求解k+1时刻的加速度ak+1,并通过积分计算出车速vk+1;
46、在下一个k+2时刻,将新的速度以vk+1、加速度ak+1作为马尔科夫车速预测模型的输入,预测k+2时刻的速度vk+2、加速度ak+2,以此迭代求下一时刻的车速;
47、对在汽车行驶状态约束条件下的马尔科夫车速预测模型进行预测:
48、将各行驶状态下的运动片段单独进行拼接后,分别按每一类行驶状态下的运动片段进行转移概率矩阵求解,并在各转移概率矩阵所对应的运动片段中进行车速预测并分析预测效果;
49、对在汽车行驶状态及时间双约束约束条件下的马尔科夫车速预测模型进行预测:
50、对道路通畅时刻和道路拥挤时刻分别提取三组行驶状态下的运动片段,对该三组运动片段再分别提取两组单一测试的运动片段;
51、分别对不同行驶状态和时间分类的下的车速数据进行转移概率矩阵的计算,并在各转移概率矩阵所对应的运动片段中进行车速预测并分析预测效果;
52、引入均方根误差rmse作为评价指标,通过数据对比评价预测结果,进行预测效果验证;
53、均方根误差rmse通过计算样本值与真实值之间差值的标准差表征样本精度,计算公式如下:
54、
55、式中,n为预测车速点的个数,vpre(k+1)为k+1时刻的预测车速,vact(k+1)为k+1时刻的实际车速;
56、综合无约束、汽车行驶状态约束、汽车行驶状态及时间双约束的三种条件下的马尔科夫车速预测模型的预测效果,得出车速预测精度最高的马尔科夫车速预测模型。
57、优选项,所述s201的具体步骤为:
58、通过线性判别分析法lda构建汽车行驶状态在线识别模型;基于线性判别分析lda将不同类别的样本在投影后的空间中分开;线性判别分析lda要最大化类间距离和最小化类内方差两个指标,即:
59、
60、其中,sb是类间散度矩阵,sw是类内散度矩阵;wt为转置后的投影向量;
61、
62、
63、其中,k是类别数,ni是第i个类别的样本数,μi是第i个类别的样本均值,μ是所有样本的均值;x是第i个类别的一个样本,xi是第i个类别中所有的样本;t为转置;
64、通过优化wtsbw类间和wtsww类内的最大比值,可以得到最优的投影向量w,使得投影后的样本分开;然后,将新的样本投影到该方向上,根据其位置判断其所属的汽车行驶状态。
65、优选项,所述s202的具体步骤为:马尔科夫车速预测包括行驶状态在线识别模型的离线训练、行驶状态在线识别、通过行驶状态和时间分类对转移概率矩阵进行约束;
66、所述行驶状态在线识别模型的离线训练的输入为k均值聚类时前三个主成分,输出为每个运动片段所属行驶状态;
67、所述行驶状态在线识别为,△t表示识别周期,即对过去△t个速度点组成的片段进行特征提取,并将特征降维后的前三个主成分作为训练好的速度识别模型的输入;△p表示识别间隔,即每隔△p个车速点进行一次速度识别;
68、所述通过行驶状态及时间分类对转移概率矩阵进行约束具体为,第一重约束为当前车速所属的时间分类,第二重约束为在线汽车行驶状态识别的结果;根据约束动态调整相应的状态转移概率矩阵,随后根据当前的车速状态、加速度状态和状态转移概率矩阵对下一时刻的加速度进行预测,从而预测下一时刻的车速。
69、优选项,所述s3的具体步骤为:
70、通过分析在线汽车行驶状态识别误差与车速预测精度之间的关系,对马尔科夫车速预测模型进行调整,得到最终的时间分类的马尔科夫车速预测模型,并将运动片段按照一周中的每个时间段进行划分,采用每个时间段的运动片段占比作为k均值聚类模型的输入进行二次聚类,分析不同的二次聚类中心个数对预测精度的影响,以验证最终的时间分类的马尔科夫车速预测模型。
71、一种实现车速预测方法的装置,包括数据获取模块、数据处理模块、离线计算模块、在线车速预测模块;
72、所述数据获取模块用于提取运动学片段的速度相关特征参数、加速度特征相关参数、时间分布相关特征参数、距离相关特征参数;
73、所述数据处理模块用于利用主成分分析方法从特征参数中提炼出不同运动片段的特征参数集,利用聚类法判别每个运动学片段所属的汽车行驶状态,利用聚类法按照每个时间间隔的各运动片段占比进行二次聚类;
74、所述离线计算模块用于基于运动学片段所属的时间分类,分别计算各时间分类下的马尔科夫车速预测的转移概率矩阵;
75、所述在线车速预测模块用于根据当前实际车速vk、实际加速度ak和相应的各时间分类下的转移概率矩阵pmn进行下一时刻的加速度预测ak+1,并利用积分计算下一时刻的车速vk+1,从而实现车速的预测。
76、有益效果:本发明通过对比分析了在无约束、行驶状态约束和行驶状态与时间分类双重约束下的markov车速预测模型的预测效果,获得预测精度最高的行驶状态与时间分类双重约束下的markov车速预测模型,分析汽车行驶状态在线识别模型对双重约束下markov车速预测精度影响,得知行驶状态识别误差会导致预测精度降低,因而将双重约束markov车速预测模型调整为基于时间分类约束的markov车速预测模型,解决了行驶状态识别误差导致预测精度降低的问题,稳定提高预测准确性。
- 还没有人留言评论。精彩留言会获得点赞!