一种基于车道线的公交车自动驾驶系统及方法与流程
本发明属于自动驾驶,尤其涉及一种基于车道线的公交车自动驾驶系统及方法。
背景技术:
1、现有的自动驾驶汽车,已经成为未来交通领域的一大变革技术,随着自动驾驶新兴技术的发展成熟,现已经拥有了一定的应用示范领域,如园区与矿区的物流作业,市区的客运作业,但面对广泛复杂的场景,还无法做到稳定有效的无人驾驶应用。
2、感知、决策、规划、控制作为自动驾驶车辆的四大核心技术,合作使能才能实现车辆的稳定自动驾驶。感知模块获取车辆周围的环境信息,对交通参与者进行行为预测,通过对感知的结果和车辆的状态进行综合判断,决策车辆的下一步动作并生成相应的行驶轨迹,最终交由控制来完成车辆的运动执行。为了应对驾驶环境的复杂性,自动驾驶车辆往往会通过增加车辆传感器、增强车载算力、改进软件算法等方式来增强自动驾驶系统的有效性,但这也造成了自动驾驶车辆成本高昂、软件系统复杂、部署周期长等普遍性问题,无法实现自动驾驶车辆的广泛场景应用。
3、目前行业内主要的自动驾驶系统的导航和定位方案,主要通过高精地图来实现。高精度地图除了普通地图的路网信息外,还融合有预先采集的特征地图信息、路口站点定位信息、交通灯定位信息以及道路上的车道线信息,这些信息再结合以车载的组合导航、激光雷达等设备信息的输入,综合完成了车辆的实时车道级定位和导航,为车辆的有效自动驾驶提供了有力支撑。但这样就需要对自动驾驶场景提前进行大规模的高精地图采集和制作,这个过程是需要投入大量时间和成本,造成了自动驾驶应用场景部署的困难,而且面对道路特征的变化没有适应能力,只能通过重新采集和更新高精地图实现。
技术实现思路
1、本发明的目的在于:为了解决上述存在的问题,而提出的一种基于车道线的公交车自动驾驶系统及方法。
2、一方面,为了实现上述目的,本发明采用了如下技术方案:一种基于车道线的公交车自动驾驶系统,其包括:
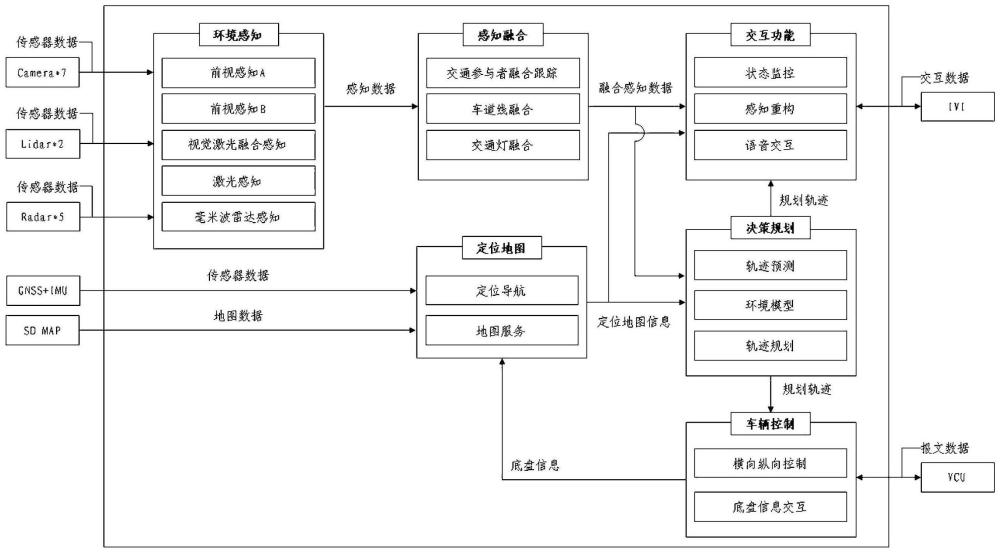
3、环境感知模块,其用于接收多个车载感知传感器输出的传感器数据作为输入,并将处理得到的感知数据输出到感知融合模块;
4、感知融合模块,其接收所述环境感知模块输出的感知数据作为输入,并将处理得到融合感知数据输出到交互功能模块和决策规划模块;
5、定位地图模块,其接收车载定位传感器输出的传感器数据、导航地图提供的地图数据和车辆控制模块输出的底盘信息作为输入,并将处理得到的定位地图信息输出到交互功能模块和决策规划模块;
6、交互功能模块,其接收所述感知融合模块输出的融合感知数据、所述定位地图模块输出的定位地图信息和决策规划模块输出的规划轨迹作为输入,并将处理得到的交互数据在车载信息娱乐系统上展示,并接收人机交互数据;
7、决策规划模块,其接收所述感知融合模块输出的融合感知数据和所述定位地图模块输出的定位地图信息作为输入,并将处理得到的规划轨迹输出到所述交互功能模块和车辆控制模块;
8、车辆控制模块,其接收决策规划模块输出的规划轨迹作为输入,并将处理得到的报文数据输出到整车控制器上进行车辆控制,并接收车辆底盘信息输出到定位地图模块。
9、作为上述技术方案的进一步描述:
10、所述环境感知模块为具有环境感知能力的软件模块。
11、作为上述技术方案的进一步描述:
12、所述感知融合模块为具有将多个感知数据在时空上完成融合功能的软件模块。
13、作为上述技术方案的进一步描述:
14、所述定位地图模块为具有的提供路网信息和车辆定位功能的软件模块。
15、作为上述技术方案的进一步描述:
16、所述交互功能模块为具有系统监控和交互功能的软件模块。
17、作为上述技术方案的进一步描述:
18、所述决策规划模块为具有生成规划轨迹能力的软件模块。
19、作为上述技术方案的进一步描述:
20、所述的车辆控制模块为具有生成车辆控制报文和与车辆底盘进行信息交互的软件模块。
21、另一方面,为了实现上述目的,本发明采用了如下方法:
22、1)车辆通过感知传感器实时采集车辆周围环境信息,通过定位传感器实时采集车辆的定位信息,通过整车控制器实时采集车辆底盘的反馈信息;
23、2)环境感知模块各子功能模块根据感知传感器的原始数据,实现各自目标感知功能,并输出结构化的感知数据;
24、3)感知融合模块实现对环境感知模块输出的结构化感知数据进行时空融合,形成高置信度的融合感知数据,并通过交互功能展示;
25、4)定位地图模块根据分析定位传感器数据和自车底盘信息,预测本车在路网中的定位信息,形成定位地图信息,并通过交互功能展示;
26、5)决策规划模块对融合感知数据进行未来轨迹预测,并形成环境风险势场模型,以此生产最优轨迹规划,并通过交互功能展示;
27、6)车辆控制模块根据车辆状态信息和系统轨迹规划,生成横向纵向控制命令,并通过数据报文发送到整车控制器,实现车辆控制。
28、综上所述,由于采用了上述技术方案,本发明的有益效果是:
29、1、本发明中,通过设计了各部分的子系统功能,实现了基于公交车车道的公交车自动驾驶方案,解决了现有的基于高精地图的自动驾驶方案带来的感知设备和定位设备成本高昂的问题,从而大量缩减了公交车自动驾驶系统的实施成本,提高经济效益。
30、2、本发明中,通过此系统的使用不需要提前进行高精度地图长周期高投入的采集制作工作,仅仅需要少量的地图适配工作,即可实现公交车自动驾驶系统的地图部署,可大大加强整体部署的灵活性,提高部署效率。
31、3、本发明中,通过此系统的使用不需要进行基于高精度地图的匹配定位工作,高精度地图在实际场景发生变化时,容易失效,但基于车道线和导航地图的定位方法的鲁棒性更高,对于特征变化不敏感,能带来更优的泛化性能。
技术特征:
1.一种基于车道线的公交车自动驾驶系统,其特征在于:包括:
2.根据权利要求1所述的一种基于车道线的公交车自动驾驶系统,其特征在于,所述环境感知模块为具有环境感知能力的软件模块。
3.根据权利要求1所述的一种基于车道线的公交车自动驾驶系统,其特征在于,所述感知融合模块为具有将多个感知数据在时空上完成融合功能的软件模块。
4.根据权利要求1所述的一种基于车道线的公交车自动驾驶系统,其特征在于,所述定位地图模块为具有的提供路网信息和车辆定位功能的软件模块。
5.根据权利要求1所述的一种基于车道线的公交车自动驾驶系统,其特征在于,所述交互功能模块为具有系统监控和交互功能的软件模块。
6.根据权利要求1所述的一种基于车道线的公交车自动驾驶系统,其特征在于,所述决策规划模块为具有生成规划轨迹能力的软件模块。
7.根据权利要求1所述的一种基于车道线的公交车自动驾驶系统,其特征在于,所述的车辆控制模块为具有生成车辆控制报文和与车辆底盘进行信息交互的软件模块。
8.一种如权利要求1-7任一所述的基于车道线的公交车自动驾驶方法,其特征在于,包括如下步骤:
技术总结
本发明公开了一种基于车道线的公交车自动驾驶系统及方法,属于自动驾驶技术领域,包括环境感知模块,其用于接收多个车载感知传感器输出的传感器数据作为输入,并将处理得到的感知数据输出到感知融合模块;感知融合模块,其接收所述环境感知模块输出的感知数据作为输入,并将处理得到融合感知数据输出到交互功能模块和决策规划模块;定位地图模块,其接收车载定位传感器输出的传感器数据;本发明通过设计了各部分的子系统功能,实现了基于公交车车道的公交车自动驾驶方案,解决了现有的基于高精地图的自动驾驶方案带来的感知设备和定位设备成本高昂的问题,从而大量缩减了公交车自动驾驶系统的实施成本,提高经济效益。
技术研发人员:杨志伟,曹科,李文帅,龚龑,张义威,刘龙
受保护的技术使用者:悦享雄安科技有限公司
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!