四驱车辆质心车速估算方法、装置、设备和存储介质与流程
本技术涉及四轮驱动车辆,特别是涉及一种四驱车辆质心车速估算方法、装置、设备和存储介质。
背景技术:
1、众所周知,四轮驱动车辆相对于传统车辆具有较为优越的操纵稳定性,且其加速性能比同样动力配置的两驱车辆要高,因此,一般高端、豪华的车辆多选用四轮驱动作为其驱动方式。不过,虽然说四轮驱动车辆具有诸多优势,但是其车速却不能直接进行观测,且由于每个车轮都可以作为主动轮,所以,在特殊工况下,比如初级失稳工况下的个别车轮的车速则不可信,而车速作为车辆系统中较为基础的参数,是横纵向动力学,运动学控制算法开展的基础,因而对于四轮驱动车辆中质心车速的精准估算就显得尤为重要。
2、在传统的实现方式中,对于四轮驱动车辆中质心车速的估算方法主要分为两类,一类是运动学方法,该方法具有较好的估算实时性,应用也相对较为广泛;另一类是动力学方法,该方法依赖于高精度的车辆动力学模型及轮胎模型,具有较高精度和较好的滤波性能。
3、然而,上述两种方式均存在一定的缺陷,即基于动力学的质心车速估算不适合复杂工况且其估算过程中引入了较多系统状态,给最终的估算算法增加了难度;而基于动力学的质心车速估算实时性一般,同时对于纵向驱动力估算和实时噪声获取都有着较高要求,针对复杂的高噪声工况效果不佳。
技术实现思路
1、基于此,本技术提供了一种四驱车辆质心车速估算方法、装置、设备和存储介质,通过全面考虑驱动状态信息、转向状态信息、稳定状态信息、动力学模型以及运动学模型,进而得到车辆质心估算车速,达到进一步提高车辆质心车速估算的精确度和可靠性的效果。
2、第一方面,提供一种四驱车辆质心车速估算方法,该方法包括:
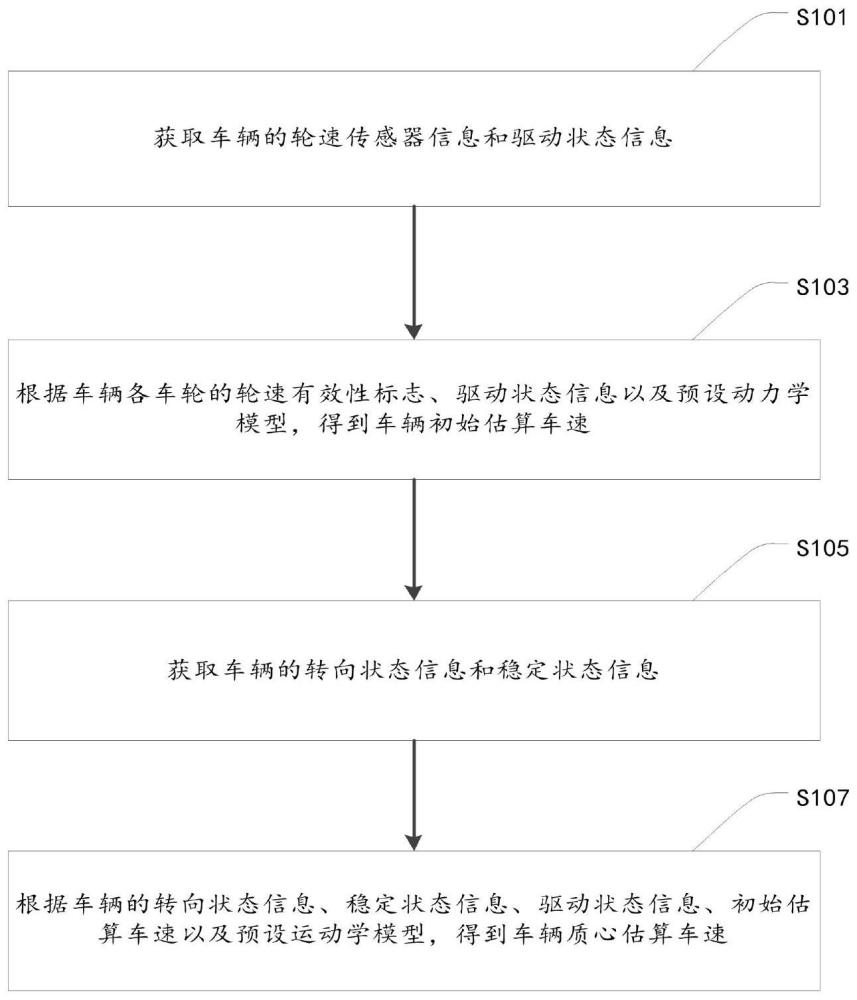
3、获取车辆的轮速传感器信息和驱动状态信息,轮速传感器信息包括车辆各车轮的轮速有效性标志;
4、根据车辆各车轮的轮速有效性标志、驱动状态信息以及预设动力学模型,得到车辆初始估算车速;
5、获取车辆的转向状态信息和稳定状态信息;
6、根据车辆的转向状态信息、稳定状态信息、驱动状态信息、初始估算车速以及预设运动学模型,得到车辆质心估算车速。
7、根据本技术实施例中一种可实现的方式,车辆各车轮的轮速有效性标志包括0和1,预设动力学模型包括预设第一动力学公式、预设第二动力学公式、以及预设第三动力学公式,根据车辆各车轮的轮速有效性标志、驱动状态信息以及预设动力学模型,得到车辆初始估算车速,包括:
8、在车辆任意一个车轮的轮速有效性标志为1时,根据预设第一动力学公式,得到有效性标志为1的车轮的车辆初始估算车速;
9、在车辆任意一个车轮的轮速有效性标志为0时,根据驱动状态信息和预设第二动力学公式,得到有效性标志为0的车轮的车辆初始估算车速;
10、在车辆两个前轮的轮速有效性标志均为0时,根据预设第三动力学公式,得到车辆两个前轮的车辆初始估算车速。
11、根据本技术实施例中一种可实现的方式,驱动状态信息包括-1、0和1,预设第二动力学公式包括最大轮速法公式和最小轮速法公式,根据驱动状态信息和预设第二动力学公式,得到有效性标志为0的车轮的车辆初始估算车速,包括:
12、在驱动状态信息为-1时,根据最大轮速法公式计算得到有效性标志为0的车轮的车辆初始估算车速;
13、在驱动状态信息为1和0时,根据最小轮速法公式计算得到有效性标志为0的车轮的车辆初始估算车速。
14、根据本技术实施例中一种可实现的方式,获取车辆的转向状态信息,包括:
15、获取车辆的横摆角速度值,根据横摆角速度值和预设角速度标准值确定车辆的横摆转向状态信息;
16、根据车辆初始估算车速和预设车速标准值确定车辆的车速转向状态信息;
17、获取车辆的转向节位置值,根据转向节位置值和预设位置标准值确定车辆的转向节位置标志信息;
18、根据横摆转向状态信息、车速转向状态信息以及转向节位置标志信息,得到车辆的转向状态信息。
19、根据本技术实施例中一种可实现的方式,车辆初始估算车速包括车辆各车轮的估算车速,获取车辆的稳定状态信息,包括:
20、根据车辆各车轮的估算车速,计算得到车辆多个车轮中的最大初始估算车速和最小初始估算车速;
21、根据最大初始估算车速和最小初始估算车速,得到车辆轮速极差;
22、根据车辆轮速极差和预设极差阈值,得到车辆的稳定状态信息。
23、根据本技术实施例中一种可实现的方式,转向状态信息包括转向状态和直行状态;稳定状态信息包括稳定状态和初级失稳状态;预设运行学模型包括预设第一运动学公式和预设第二运动学公式,根据车辆的转向状态信息、稳定状态信息、驱动状态信息、初始估算车速以及预设运动学模型,得到车辆质心估算车速,包括:
24、在当前车辆的转向状态信息为转向状态且稳定状态信息为稳定状态时,根据车辆的转向节位置值、车辆初始估算车速以及预设第一运动学公式,得到车辆质心估算车速;
25、在当前车辆的转向状态信息为直行状态且稳定状态信息为稳定状态时,根据驱动状态信息、车辆初始估算车速以及预设第二运动学公式,得到车辆质心估算车速;
26、在当前车辆的转向状态信息为直行状态且稳定状态信息为初级失稳状态时,根据驱动状态信息和车辆初始估算车速,得到车辆质心估算车速。
27、根据本技术实施例中一种可实现的方式,驱动状态信息还包括驱动切换状态;根据车辆的转向状态信息、稳定状态信息、驱动状态信息、初始估算车速以及预设运动学模型,得到车辆质心估算车速,还包括:
28、在当前车辆的转向状态信息为直行状态、稳定状态信息为初级失稳状态以及驱动状态信息为驱动切换状态时,获取车辆在驱动切换状态时刻的切换车速;
29、根据驱动状态信息、切换车速以及车辆初始估算车速,得到车辆质心估算车速。
30、第二方面,提供了一种四驱车辆质心车速估算装置,该装置包括:
31、第一获取模块,用于获取车辆的轮速传感器信息和驱动状态信息,轮速传感器信息包括车辆各车轮的轮速有效性标志;
32、初始车速模块,用于根据车辆各车轮的轮速有效性标志、驱动状态信息以及预设动力学模型,得到车辆初始估算车速;
33、第二获取模块,用于获取车辆的转向状态信息和稳定状态信息;
34、质心车速模块,用于根据车辆的转向状态信息、稳定状态信息、驱动状态信息、初始估算车速以及预设运动学模型,得到车辆质心估算车速。
35、第三方面,提供了一种计算机设备,包括:
36、至少一个处理器;以及
37、与至少一个处理器通信连接的存储器;其中,
38、存储器存储有可被至少一个处理器执行的计算机指令,计算机指令被至少一个处理器执行,以使至少一个处理器能够执行上述第一方面中涉及的方法。
39、第四方面,提供了一种计算机可读存储介质,其上存储有计算机指令,其特征在于,计算机指令用于使计算机执行上述第一方面中涉及的方法。
40、根据本技术实施例所提供的技术内容,通过获取车辆的轮速传感器信息和驱动状态信息,轮速传感器信息包括车辆各车轮的轮速有效性标志;根据车辆各车轮的轮速有效性标志、驱动状态信息以及预设动力学模型,得到车辆初始估算车速;获取车辆的转向状态信息和稳定状态信息;根据车辆的转向状态信息、稳定状态信息、驱动状态信息、初始估算车速以及预设运动学模型,得到车辆质心估算车速。上述操作,通过全面考虑驱动状态信息、转向状态信息、稳定状态信息、动力学模型以及运动学模型,进而得到车辆质心估算车速,达到进一步提高车辆质心车速估算的精确度和可靠性的效果。
- 还没有人留言评论。精彩留言会获得点赞!