一种用于多功能作业的工程机器人
本技术涉及工程机器人,尤其涉及一种用于多功能作业的工程机器人。
背景技术:
1、随着机器人技术的快速发展,工程机器人技术逐渐完善,为了代替人工完成智能化作业,节省劳动强度,使得工程机器人在施工现场得到了广泛的使用,其能够通过模拟施工动作,而且效率以及精度高,常用的包括运输机器人、上下料机器人等;而传统的工程机器人功能较为单一,无法进行多功能使用,使其实用性较低,而且在对物料进行上下料时,大多均采用单个料斗,需要机器人进行较大幅度偏转,不便于在受限的工地使用,实用性较差,为此我们需要设计一款适用性更好的用于多功能作业的工程机器人。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种用于多功能作业的工程机器人。
2、为了实现上述目的,本实用新型采用了如下技术方案:
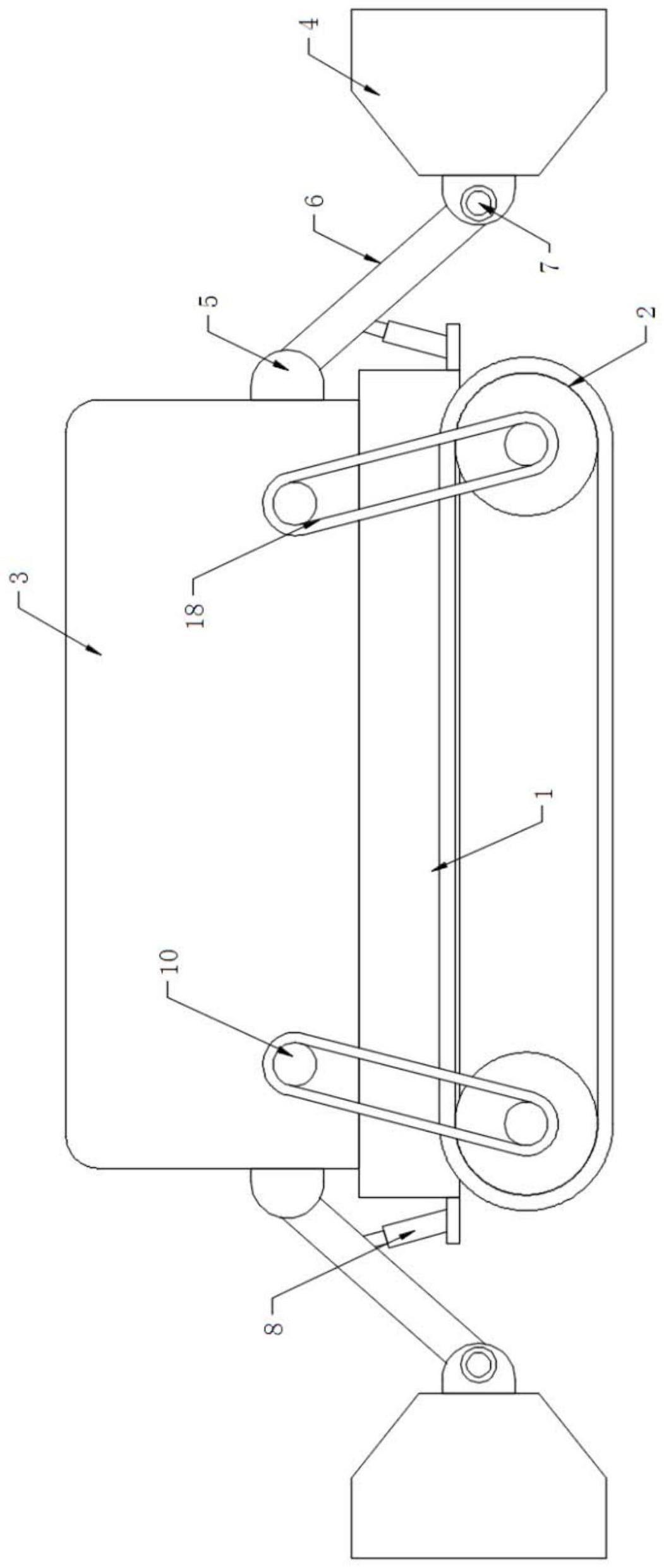
3、一种用于多功能作业的工程机器人,包括机器人本体,所述机器人本体的底部设置有多个履带机构,所述机器人本体的上端设置有处理块,所述机器人本体的两端均通过偏转装置连接有清理斗,所述偏转装置包括固定与处理块端部和清理斗端部的安装块,两个所述安装块的内部共同转动连接有连接板,其中一个所述安装块的端部固定有调节电机,所述调节电机的主轴与连接板转动连接,所述处理块的内部设置有分筛装置。
4、优选地,所述机器人本体的端部转动连接有伸缩缸,所述伸缩缸的杆头与连接板底部转动连接。
5、优选地,所述分筛装置包括与处理块端部贯穿开设的通槽,所述通槽的内壁通过轴承转动连接有两个水平杆,两个所述水平杆的周向侧壁共同套设有传送带,每个所述水平杆的端部均贯穿至处理块的外部并通过连接带与履带机构连接。
6、优选地,所述通槽的内壁固定有两个对称设置的导向块,每个所述导向块的上端均固定有竖直挡板。
7、优选地,所述通槽的内壁固定有多组安装杆,多组所述安装杆的端部固定有两个第一挡板和第二挡板,所述第二挡板的底部与传送带上端相抵,所述第二挡板为v型板,所述第二挡板位于两个第一挡板之间。
8、优选地,所述机器人本体的上端贯穿开设有两个下料槽,两个下料槽对称设置。
9、与现有技术相比,本实用新型的优点在于:
10、1、本装置中,通过利用两端可偏转的伸缩缸可带动连接板偏转,结合清理斗端部的调节电机,可实现对物料的稳定处理使用,而且通过在机器人本体前后两端均设置清理斗,无需工程机器人进行较大的偏转,方便在场地受限的工地使用。
11、2、本装置中,通过在处理块的内部设置分筛装置,可在机器人本体移动过程中,实现对物料的输送,从而可利用第一挡板和第二挡板,实现对较大以及细小物料的分别导出,可自动实现对物料的分别堆积,方便物料后续的直接使用。
技术特征:
1.一种用于多功能作业的工程机器人,包括机器人本体(1),其特征在于,所述机器人本体(1)的底部设置有多个履带机构(2),所述机器人本体(1)的上端设置有处理块(3),所述机器人本体(1)的两端均通过偏转装置连接有清理斗(4),所述偏转装置包括固定与处理块(3)端部和清理斗(4)端部的安装块(5),两个所述安装块(5)的内部共同转动连接有连接板(6),其中一个所述安装块(5)的端部固定有调节电机(7),所述调节电机(7)的主轴与连接板(6)转动连接,所述处理块(3)的内部设置有分筛装置。
2.根据权利要求1所述的一种用于多功能作业的工程机器人,其特征在于,所述机器人本体(1)的端部转动连接有伸缩缸(8),所述伸缩缸(8)的杆头与连接板(6)底部转动连接。
3.根据权利要求1所述的一种用于多功能作业的工程机器人,其特征在于,所述分筛装置包括与处理块(3)端部贯穿开设的通槽(9),所述通槽(9)的内壁通过轴承转动连接有两个水平杆(10),两个所述水平杆(10)的周向侧壁共同套设有传送带(11),每个所述水平杆(10)的端部均贯穿至处理块(3)的外部并通过连接带(18)与履带机构(2)连接。
4.根据权利要求3所述的一种用于多功能作业的工程机器人,其特征在于,所述通槽(9)的内壁固定有两个对称设置的导向块(12),每个所述导向块(12)的上端均固定有竖直挡板(13)。
5.根据权利要求4所述的一种用于多功能作业的工程机器人,其特征在于,所述通槽(9)的内壁固定有多组安装杆(14),多组所述安装杆(14)的端部固定有两个第一挡板(15)和第二挡板(16),所述第二挡板(16)的底部与传送带(11)上端相抵,所述第二挡板(16)为v型板,所述第二挡板(16)位于两个第一挡板(15)之间。
6.根据权利要求5所述的一种用于多功能作业的工程机器人,其特征在于,所述机器人本体(1)的上端贯穿开设有两个下料槽(17),两个下料槽(17)对称设置。
技术总结
本技术公开了一种用于多功能作业的工程机器人,包括机器人本体,所述机器人本体的底部设置有多个履带机构,所述机器人本体的上端设置有处理块,所述机器人本体的两端均通过偏转装置连接有清理斗,所述偏转装置包括固定与处理块端部和清理斗端部的安装块,两个所述安装块的内部共同转动连接有连接板,其中一个所述安装块的端部固定有调节电机,所述调节电机的主轴与连接板转动连接,所述处理块的内部设置有分筛装置。本装置中,通过在处理块的内部设置分筛装置,可在机器人本体移动过程中,实现对物料的输送,从而可利用第一挡板和第二挡板,实现对较大以及细小物料的分别导出,自动实现对物料的分别堆积,方便物料后续的直接使用。
技术研发人员:王博,王德义,韩浩男,张晨阳
受保护的技术使用者:安徽工业大学
技术研发日:20230423
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!