一种无人驾驶矿用自卸车的制作方法
本技术涉及自卸车,具体为一种无人驾驶矿用自卸车。
背景技术:
1、矿山自卸车属于非公路自卸车,是在非公路的野外场地,如大型露天矿、水利工程中,用于运输煤矿、沙石的自卸车。在土木工程中,经常与挖掘机、装载机、带式输送机等工程机械联合作业,构成装、运、卸生产线,进行土方、砂石、散料的装卸运输工作,而为了保证一些特殊的矿山开采环境和提升安全性、便捷性,使得无人驾驶矿用自卸车的应用逐渐变多。
2、常见的无人驾驶自卸车在进行使用时,一般均通过内部的无人驾驶模块来控制驱动系统和车斗驱动组件中的电机、气缸等器件,从而实现自动运行、装卸料等操作,但这种方式由于料斗的倾斜方向固定,导致在无人驾驶的状态下自卸车只能对定点位置进行卸料,当需要对多个方位进行卸料时,只能控制自卸车进行频繁转向,从而增加了无人驾驶的操作难度,且降低了卸料的速度,使得整个卸料过程非常不便,不能满足自卸车的工作要求,为此提出一种无人驾驶矿用自卸车。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种无人驾驶矿用自卸车,以解决上述的技术问题。
3、(二)技术方案
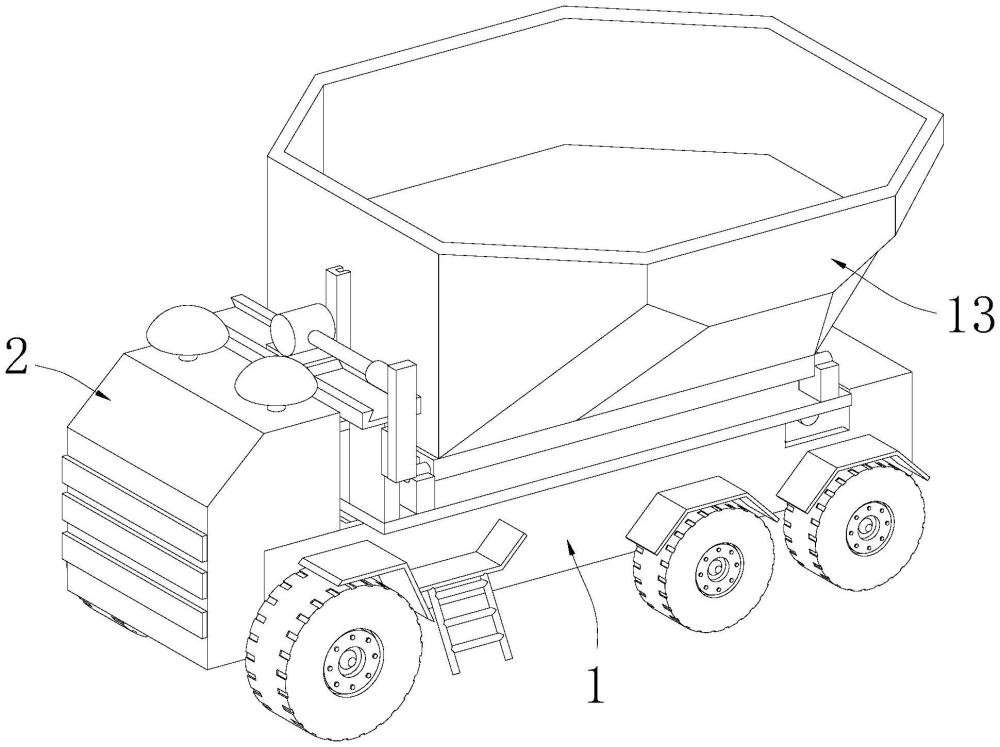
4、为实现上述的目的,本实用新型提供如下技术方案:一种无人驾驶矿用自卸车,包括车身,所述车身的左侧装设有无人驾驶模块,所述车身的顶部装设有平板,所述平板的顶部左侧安装有滑轨,所述滑轨的顶部卡接有驱动电机的转子同轴固定连接有传动架,所述滑轨的前部上侧固定连接有支架,且支架的后部上侧固定连接有气缸,所述气缸的后端与驱动电机的对应位置固定连接,所述平板的顶部四角均装设有卡接座,且卡接座的内部均插接有卡接柱,所述卡接柱的内侧均装设有承载台,所述承载台的顶部安装有料斗。
5、优选的,所述承载台的底部中间位置固定连接有l形支架,所述l形支架的左侧插设于传动架的内部,通过驱动电机带动传动架的转动,同时通过气缸带动驱动电机的运动,从而可使得传动架通过l形支架带动承载台进行向左或向右翻转,方便了对车身的左右两侧进行卸料操作。
6、优选的,所述平板的底部四角均装设有第一铰接耳,且左侧第一铰接耳的间距小于右侧,右侧所述第一铰接耳的外侧均通过轴承与车身的内部对应位置活动连接。
7、优选的,右侧所述第一铰接耳的内部固定连接有第一连接轴,左侧所述第一铰接耳的内侧均通过轴承活动连接有主传动杆,且主传动杆右侧连接有第三连接轴。
8、优选的,所述车身的内腔底部与左侧所述第一铰接耳相对应的位置均装设有第二铰接耳,所述第二铰接耳的内侧均通过轴承活动连接有副传动杆,所述副传动杆的右端均通过轴承与主传动杆的对应位置活动连接,由于在液压油缸两侧加设的主传动杆和副传动杆,使得卸料时更加的平稳。
9、优选的,所述第二铰接耳左侧固定连接有第二连接轴,且第二连接轴的外部通过套环活动连接有液压油缸,且液压油缸的右端套设于第三连接轴的外部,通过液压油缸带动主传动杆和副传动杆的运动,从而可推动料斗以第一连接轴为点进行倾斜,使得可对车身的后部进行卸料,方便了根据不同的环境使得料斗对三个方位进行灵活卸料。
10、(三)有益效果
11、与现有技术相比,本实用新型提供了一种无人驾驶矿用自卸车,具备以下
12、有益效果:
13、该无人驾驶矿用自卸车,通过驱动电机带动传动架的转动,同时通过气缸带动驱动电机的运动,从而可使得传动架通过l形支架带动承载台进行向左或向右翻转,方便了对车身的左右两侧进行卸料操作,或通过液压油缸带动主传动杆和副传动杆的运动,从而可推动料斗以第一连接轴为点进行倾斜,使得可对车身的后部进行卸料,方便了根据不同的环境使得料斗对三个方位进行灵活卸料,提升了无人驾驶的操作便捷性,提升了卸料的速度,且由于在液压油缸两侧加设的主传动杆和副传动杆,使得卸料时更加的平稳。
技术特征:
1.一种无人驾驶矿用自卸车,包括车身(1),其特征在于:所述车身(1)的左侧装设有无人驾驶模块(2),所述车身(1)的顶部装设有平板(3),所述平板(3)的顶部左侧安装有滑轨(4),所述滑轨(4)的顶部卡接有驱动电机(5),且驱动电机(5)的转子同轴固定连接有传动架(6),所述滑轨(4)的前部上侧固定连接有支架(7),且支架(7)的后部上侧固定连接有气缸(8),所述气缸(8)的后端与驱动电机(5)的对应位置固定连接,所述平板(3)的顶部四角均装设有卡接座(10),且卡接座(10)的内部均插接有卡接柱(11),所述卡接柱(11)的内侧均装设有承载台(12),所述承载台(12)的顶部安装有料斗(13)。
2.根据权利要求1所述的一种无人驾驶矿用自卸车,其特征在于:所述承载台(12)的底部中间位置固定连接有l形支架(61),所述l形支架(61)的左侧插设于传动架(6)的内部。
3.根据权利要求2所述的一种无人驾驶矿用自卸车,其特征在于:所述平板(3)的底部四角均装设有第一铰接耳(9),且左侧第一铰接耳(9)的间距小于右侧,右侧所述第一铰接耳(9)的外侧均通过轴承与车身(1)的内部对应位置活动连接。
4.根据权利要求3所述的一种无人驾驶矿用自卸车,其特征在于:右侧所述第一铰接耳(9)的内部固定连接有第一连接轴(15),左侧所述第一铰接耳(9)的内侧均通过轴承活动连接有主传动杆(16),且主传动杆(16)右侧连接有第三连接轴(19)。
5.根据权利要求4所述的一种无人驾驶矿用自卸车,其特征在于:所述车身(1)的内腔底部与左侧所述第一铰接耳(9)相对应的位置均装设有第二铰接耳(14),所述第二铰接耳(14)的内侧均通过轴承活动连接有副传动杆(17),所述副传动杆(17)的右端均通过轴承与主传动杆(16)的对应位置活动连接。
6.根据权利要求5所述的一种无人驾驶矿用自卸车,其特征在于:所述第二铰接耳(14)左侧固定连接有第二连接轴(18),且第二连接轴(18)的外部通过套环活动连接有液压油缸(20),且液压油缸(20)的右端套设于第三连接轴(19)的外部。
技术总结
本技术涉及自卸车技术领域,且公开了一种无人驾驶矿用自卸车,包括车身,所述车身的顶部装设有平板,所述平板的顶部左侧安装有滑轨,所述滑轨的顶部卡接有驱动电机的转子同轴固定连接有传动架,所述气缸的后端与驱动电机的对应位置固定连接,所述卡接柱的内侧均装设有承载台,所述承载台的顶部安装有料斗。该无人驾驶矿用自卸车,通过驱动电机带动传动架的转动,同时通过气缸带动驱动电机的运动,从而可使得传动架通过L形支架带动承载台进行向左或向右翻转,方便了对车身的左右两侧进行卸料操作,或通过液压油缸带动主传动杆和副传动杆的运动,从而可推动料斗进行倾斜,使得可对车身的后部进行卸料。
技术研发人员:藏杰勋,袁金祥,赵耀忠,刘强,刘跃,戚红建,李伟,王宇飞,张洪卫,白宇
受保护的技术使用者:华能伊敏煤电有限责任公司
技术研发日:20230601
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!